一种无人机的编队回收装置及回收方法
1.本公开涉及无人机技术领域,尤其涉及一种无人机的编队回收装置及回收方法。
背景技术:
2.无人机体积质量小,续航能力与单机任务能力有限。无人机集群通过多机协同方式一定程度拓展了无人机应用场景。尤其在军事任务中,无人机集群可大幅度提升单机突防能力,并且可对关键敏感目标形成饱和攻击。当前无人机集群的释放方式研究较为成熟,路基与空基均可实施无人机集群部署。然而较大型无人机集群通常价格昂贵,如果进行一次性使用则作战成本过高,在任务结束后有必要进行回收。在作战区域距离机场或基地较远时,无人机在执行任务后剩余续航难以满足返航要求,此时便有必要采用较大型载机进行空基回收。无人机集群的空基回收难度较大,国内外鲜有成熟有效方案。当前较为先进的美国小精灵无人机集群采用类似于空中加油的方式实现软索拖拽回收。主要是由大型运输机释放类似空中加油软管的柔性索,实现其与无人机的对接,再由柔性索将无人机拖拽至货舱门附近,由舱门附近的机构实现无人机的折叠摆放,完成回收。这种方式虽然可以较为安全地使载机与无人机对接并拖拽至载机,但回收单架飞机的时间较长,在15分钟左右,导致未回收无人机需要长时间伴飞等待。如果考虑回收10架无人机,则最后回收的无人机飞行时间就比第一架回收的无人机长出150分钟(2个半小时),这对任务结束后的无人机剩余续航提出了不现实约束,极大限制了可回收无人机的数量。
技术实现要素:
3.基于此,有必要针对上述技术问题,提供一种对接过程耗时短、可回收数量多的无人机的编队回收装置及回收方法。
4.一种无人机的编队回收装置,包括:
5.载机,内设有定位抓取机构;
6.多个无人机,每个所述无人机上设有前向牵拉对接件和后向级联对接件,相邻两个所述无人机的前向牵拉对接件和后向级联对接件相配合;
7.多个所述无人机按照编队依次连接,最前方的无人机为长机,所述长机与所述定位抓取机构相连接,所述定位抓取机构能够将所述无人机按照编队顺序依次抓入到所述载机中。
8.在其中一个实施例中,所述前向牵拉对接件包括连接杆和对接公头,所述连接杆的一端与所述无人机的上部相连接,所述连接杆的另一端与所述对接公头相连接;所述后向级联对接件包括连接件和对接母头,所述连接件的一端与所述无人机的下部相连接,所述连接件的另一端与所述对接母头相连接,其中,相邻两个所述无人机的所述对接公头和所述对接母头相配合。
9.在其中一个实施例中,所述无人机的上部和下部分别设有前向牵拉对接件舱和后向级联对接件舱,所述前向牵拉对接件和后向级联对接件分别放置在所述前向牵拉对接件
舱和后向级联对接件舱中。
10.在其中一个实施例中,所述连接杆为支架,所述连接件为柔性索或硬杆。
11.在其中一个实施例中,所述前向牵拉对接件和后向级联对接件的位置和力作用线靠近所述无人机的重心。
12.一种使用无人机的编队回收装置的回收方法,包括以下步骤:
13.s1、各无人机根据前后位置,调整飞行姿态,准备进行编队内的对接过程;
14.s2、前后方相邻的两个无人机之间通过前向牵拉对接件和后向级联对接件进行对接;
15.s3、所有无人机对接完成后,以编队形式继续飞行;
16.s4、载机根据长机的位置完成与长机的对接;
17.s5、定位抓取机构将无人机按照编队顺序依次抓入到所述载机中,直至所有无人机均进入载机中。
18.在其中一个实施例中,所述步骤s2中,前后方相邻的两个无人机之间通过前向牵拉对接件和后向级联对接件进行对接的过程包括:
19.s21、后方无人机调整与前方无人机的相对位置;
20.s22、前方无人机将后向级联对接件的对接母头伸出,后方无人机将前向牵拉对接件的对接公头伸出,所述对接母头和所述对接公头相配合,完成相邻的两个无人机的对接;
21.s23、保持后向级联对接件的连接件处于松弛状态。
22.在其中一个实施例中,所述步骤s3中,所有无人机对接完成后,部分无人机可以关闭动力。
23.在其中一个实施例中,所述步骤s3中,所述无人机以编队形式继续飞行过程中,所述后向级联对接件的连接件逐渐缩短收紧,且在前方无人机和后方无人机相距足够近时,依靠前方无人机和后方无人机上预装的对接机构实现前方无人机和后方无人机的刚性连接。
24.在其中一个实施例中,所述长机与载机的对接,所述长机与其余无人机的对接顺序可调整。
25.上述无人机的编队回收装置及回收方法,通过在每个无人机上设置前向牵拉对接件和后向级联对接件,相邻两个无人机的前向牵拉对接件和后向级联对接件相配合;然后,多个无人机按照编队依次连接,最后,定位抓取机构能够将无人机按照编队顺序依次抓入到载机中,其可大大减少无人机编队与载机对接后回收的时间,从而能保证有限时间内提高回收的数量,且不易造成显著的无人机的质量增加和续航降低。
附图说明
26.附图示出了本公开的示例性实施方式,并与其说明一起用于解释本公开的原理,其中包括了这些附图以提供对本公开的进一步理解,并且附图包括在本说明书中并构成本说明书的一部分。
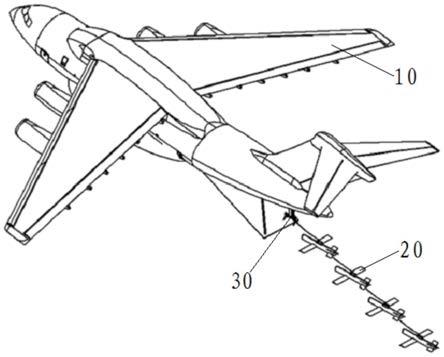
27.图1是本公开的无人机的编队回收装置的使用状态图;
28.图2是本公开的无人机的编队回收装置的结构示意图;
29.图3是本公开的无人机的编队回收装置的局部放大图;
30.图4是本公开的无人机的编队回收方法的方法流程图。
具体实施方式
31.下面结合附图和实施方式对本公开作进一步的详细说明。可以理解的是,此处所描述的具体实施方式仅用于解释相关内容,而非对本公开的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本公开相关的部分。
32.需要说明的是,在不冲突的情况下,本公开中的实施方式及实施方式中的特征可以相互组合。下面将参考附图并结合实施方式来详细说明本公开。
33.参阅图1
‑
3所示,本公开一实施例提供一种无人机的编队回收装置,其特征在于,包括载机10、多个无人机20和定位抓取机构30。
34.具体地,载机10内设有定位抓取机构30,本实施例中,载机10即为运输机,其主要用于承载回收的无人机。定位抓取机构30可以机械手等,能将无人机抓取后放置到载机10内的固定位置。
35.进一步地,每个所述无人机20上设有前向牵拉对接件201和后向级联对接件202,相邻两个所述无人机20的前向牵拉对接件201和后向级联对接件202相配合;
36.进一步地,多个所述无人机20按照编队依次连接,最前方的无人机20为长机,所述长机与所述定位抓取机构30相连接,所述定位抓取机构30能够将所述无人机20按照编队顺序依次抓入到所述载机10中。例如:无人机集群将在任务完成后,综合各类因素选择一架作为编队回收过程的长机打头带飞,其余无人机间根据自身在编队中的位置进行排序,并按照从长机开始,从前至后的顺序完成前后机的级联对接,并以编队形式继续飞行。其中,无人机级联过程可在无人机完成任务后的返航途中进行,以缩短整个无人机回收耗时。
37.需要说明的是,载机10中的定位抓取机构30包括后向级联对接件202,当无人机编队与载机10会合后,长机的前向牵拉对接件201与载机10的后向级联对接件202进行连接,此后,载机10便可以通过牵拉对接件将无人机编队牵拉入机舱,在每架无人机抵达载机10的机舱时,可由定位抓取机构30将无人机抓取、折叠并按序存放。
38.上述无人机的编队回收装置及回收方法,通过在每个无人机20上设置前向牵拉对接件201和后向级联对接件202,相邻两个无人机20的前向牵拉对接件201和后向级联对接件202相配合;然后,多个无人机20按照编队依次连接,最后,定位抓取机构30能够将无人机20按照编队顺序依次抓入到载机10中,其可大大减少无人机编队与载机10对接后回收的时间,从而能保证有限时间内提高回收的数量,且不易造成显著的无人机的质量增加和续航降低。
39.本公开一实施例中,所述前向牵拉对接件201包括连接杆2011和对接公头2012,所述连接杆2011的一端与所述无人机20的上部相连接,所述连接杆2011的另一端与所述对接公头2012相连接;所述后向级联对接件202包括连接件2021和对接母头2022,所述连接件2021的一端与所述无人机20的下部相连接,所述连接件2021的另一端与所述对接母头2022相连接,其中,相邻两个所述无人机20的所述对接公头2012和所述对接母头2022相配合。
40.本公开一实施例中,所述无人机20的上部和下部分别设有前向牵拉对接件舱203和后向级联对接件舱204,所述前向牵拉对接件201和后向级联对接件202分别放置在所述前向牵拉对接件舱203和后向级联对接件舱204中。本实施例中,在飞行过程中,前向牵拉对
接件201和后向级联对接件202可以收回折叠在所述前向牵拉对接件舱203和后向级联对接件舱204中,从而可以降低阻力,在无人机对接、回收过程中才展开使用。换言之,前向牵拉对接件201类似于战斗机空中加油受油杆,而后向级联对接件202类似于空中加油机拖曳的加油管,由此每一架无人机即具备与前机对接,被前机拖曳飞行的能力,又具备与后机级联拖曳后机的能力。
41.本公开一实施例中,所述连接杆2011为支架,所述连接件2021为柔性索或硬杆。值得注意的是,柔性索等软式结构可以对前后无人机的飞行控制影响较小,重量较轻。而支架、硬杆等硬式结构则具有方向可控、可以操纵硬式结构辅助对接,缩短对接时间等优点。
42.可选地,所述前向牵拉对接件201和后向级联对接件202的位置和力作用线靠近所述无人机20的重心。如此,可以降低级联过程中,所述前向牵拉对接件201和后向级联对接件202对无人机20的个体姿态与飞行控制的影响。
43.参阅图4所示,本公开一实施例提供一种无人机的编队回收方法,包括以下步骤:
44.s1、各无人机20根据前后位置,调整飞行姿态,准备进行编队内的对接过程;
45.s2、前后方相邻的两个无人机20之间通过前向牵拉对接件201和后向级联对接件202进行对接;
46.s3、所有无人机20对接完成后,以编队形式继续飞行;
47.s4、载机10根据长机的位置完成与长机的对接;
48.s5、定位抓取机构30将无人机20按照编队顺序依次抓入到所述载机10中,直至所有无人机20均进入载机10中。
49.具体地,所述步骤s2中,前后方相邻的两个无人机20之间通过前向牵拉对接件201和后向级联对接件202进行对接的过程包括:
50.s21、后方无人机20调整与前方无人机20的相对位置;
51.s22、前方无人机20将后向级联对接件202的对接母头2022伸出,后方无人机20将前向牵拉对接件201的对接公头2012伸出,所述对接母头2022和所述对接公头2012相配合,完成相邻的两个无人机20的对接;
52.s23、保持后向级联对接件202的连接件2021处于松弛状态。
53.进一步地,所述步骤s3中,所有无人机20对接完成后,部分无人机20可以关闭动力。如此,部分无人机20只对舵面进行控制以稳定飞行姿态,而依靠前向牵拉对接件201和后向级联对接件202的牵引作为飞行动力,以进一步缩短对接过程对无人机航时的需求。
54.进一步地,所述步骤s3中,所述无人机20以编队形式继续飞行过程中,所述后向级联对接件202的连接件2021逐渐缩短收紧,且在前方无人机20和后方无人机20相距足够近时(如接近接触状态),依靠前方无人机20和后方无人机20上预装的对接机构实现前方无人机20和后方无人机20的刚性连接。从而,可以重构成一架由多架无人机组成的复合飞行器,此复合飞行器可与载机10进行对接回收,对接回收过程与单架无人机的对接回收相同,以此进一步缩短无人机回收时间。
55.进一步地,所述长机与载机10的对接,所述长机与其余无人机的对接顺序可调整。例如:在无人机集群返航过程较短,无法完成级联对接的情况下,可先与载机10会合完成长机与载机的对接,再依次进行其它无人机的对接。
56.在本说明书的描述中,参考术语“一个实施例/方式”、“一些实施例/方式”、“示
例”、“具体示例”、或“一些示例”等的描述意指结合该实施例/方式或示例描述的具体特征、结构、材料或者特点包含于本申请的至少一个实施例/方式或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例/方式或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例/方式或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例/方式或示例以及不同实施例/方式或示例的特征进行结合和组合。
57.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本申请的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
58.本领域的技术人员应当理解,上述实施方式仅仅是为了清楚地说明本公开,而并非是对本公开的范围进行限定。对于所属领域的技术人员而言,在上述公开的基础上还可以做出其它变化或变型,并且这些变化或变型仍处于本公开的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1