一种可使无人机受风时更加稳定的小型推进器的制作方法
1.本发明涉及一种小型推进器,尤其涉及一种可使无人机受风时更加稳定的小型推进器。
背景技术:
2.国内外无人机相关技术飞速发展,无人机系统种类繁多、用途广特点鲜明,无人机是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞行器,无人机实际上是无人驾驶飞行器的统称,由于无人驾驶飞机对未来空战有着重要的意义,世界各主要军事国家都在加紧进行无人驾驶飞机的研制工作。
3.无人机需要侦察监视的面积较广,且需要长时间飞行于高空环境中,由于高空环境中空气气流较大,会造成无人机飞行不稳定,不能连续获取信息,甚至会造成情报“盲区”。
技术实现要素:
4.本发明的目的是提供一种能够使无人机受风流影响时保持稳定飞行的可使无人机受风时更加稳定的小型推进器,以克服上述现有装置无人机会受空气流速影响导致飞行不稳定的缺陷。
5.本发明的技术方案为:一种可使无人机受风时更加稳定的小型推进器,包括有开槽导向圆柱架、四角开孔支撑架、n字型开槽滑动块、驱动机构、摆动机构、转速调节机构和飞行桨变距机构,开槽导向圆柱架底面固接有四角开孔支撑架,开槽导向圆柱架上分布式滑动连接有n字型开槽滑动块,开槽导向圆柱架上设有驱动机构,摆动机构滑动式连接于n字型开槽滑动块上,转速调节机构设于摆动机构上,飞行桨变距机构同样设于摆动机构上。
6.在其中一个实施例中,驱动机构包括有电机支架、伺服电机、传动轴、小锥齿轮、大锥齿轮和开孔限位支架,开槽导向圆柱架上固定安装有电机支架,伺服电机固定安装在电机支架上,伺服电机输出轴上固接有传动轴,传动轴与开槽导向圆柱架转动式连接,传动轴一端固接有小锥齿轮,四角开孔支撑架上转动式连接有开孔限位支架,开孔限位支架顶面固接有大锥齿轮,小锥齿轮与大锥齿轮之间相互啮合。
7.在其中一个实施例中,摆动机构包括有四角摆动架、帆旗安装架、第一复位弹簧、摆动轴、摆动球、旋转轴、限位架和固定圆盘,n字型开槽滑动块上共同滑动式连接有四角摆动架,四角摆动架上分布式固接有帆旗安装架,帆旗安装架与n字型开槽滑动块之间连接有第一复位弹簧,四角摆动架中部转动式连接有摆动轴,摆动轴上固接有摆动球,摆动球与开孔限位支架转动式配合,两旋转轴转动式连接于转速调节机构上,两旋转轴上共同固接有限位架,固定圆盘固接于摆动轴下方。
8.在其中一个实施例中,转速调节机构包括有楔形推动块、异型楔形推动杆、开槽齿圈、带圆杆四角支撑架、第二复位弹簧、行星齿轮、开孔圆盘、带长杆齿轮保持架、铰接杆、开孔限位圈、太阳齿轮、第三复位弹簧、小卡杆和第四复位弹簧,四角摆动架底面分布式固接
有楔形推动块,开孔限位支架上滑动式连接有异型楔形推动杆,异型楔形推动杆底端固接有开槽齿圈,开槽齿圈上转动式连接有带圆杆四角支撑架,带圆杆四角支撑架与四角开孔支撑架滑动式连接,带圆杆四角支撑架与四角开孔支撑架之间连接有第二复位弹簧,带长杆齿轮保持架转动式连接于开槽齿圈上,行星齿轮通过转轴分布式转动连接于带长杆齿轮保持架上,开槽齿圈与行星齿轮相互啮合,开孔圆盘滑动式连接于开槽齿圈上,两旋转轴转动式连接于开孔圆盘上,摆动轴上分布式铰接有铰接杆,限位架上固接有开孔限位圈,铰接杆与开孔限位圈滑动式连接,开孔限位圈与铰接杆之间连接有第三复位弹簧,开孔限位圈顶面固接有太阳齿轮,开槽齿圈上滑动式连接有小卡杆,小卡杆卡入开孔圆盘凹槽内,小卡杆与开槽齿圈之间连接有第四复位弹簧。
9.在其中一个实施例中,飞行桨变距机构还包括有开孔旋转架、转动卡环、变距螺旋桨、连接杆和旋转圈,固定圆盘上固接有开孔旋转架,开孔旋转架上分布式连接有转动卡环,转动卡环上铰接有变距螺旋桨,变距螺旋桨上固接有连接杆,连接杆与开孔旋转架滑动式连接,连接杆一端共同固接有旋转圈,带长杆齿轮保持架与旋转圈滑动式连接。
10.有益效果:通过转速调节机构,根据开槽齿圈、行星齿轮与太阳齿轮之间的齿数可知,行星齿轮带动太阳齿轮加速旋转,进而使得摆动轴通过固定圆盘带动开孔旋转架及其上装置快速转动,变距螺旋桨快速转动使得空气流速差越大,变距螺旋桨下方气流压力大于变距螺旋桨上方气流压力,变距螺旋桨快速转动产生的推力越大,使得无人机飞行越稳定。
11.通过飞行桨变距机构,带长杆齿轮保持架推动旋转圈及其上装置向下运动,使得连接杆带动变距螺旋桨向下摆动,使得变距螺旋桨角度发生偏转,使得变距螺旋桨转动效率提高,使无人机能够在不同气流流速中运行,充分地保证了无人机稳定飞行。
附图说明
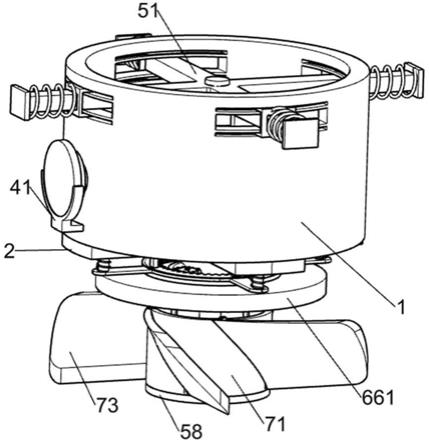
12.图1为本发明的立体结构示意图。
13.图2为本发明的部分立体结构示意图。
14.图3为本发明驱动机构的立体结构示意图。
15.图4为本发明摆动机构的立体结构示意图。
16.图5为本发明转速调节机构的第一种部分立体结构示意图。
17.图6为本发明转速调节机构的第二种部分立体结构示意图。
18.图7为本发明转速调节机构的第三种部分立体结构示意图。
19.图8为本发明a的放大结构示意图。
20.图9为本发明飞行桨变距机构的立体结构示意图。
21.图中标记为:1
‑
开槽导向圆柱架,2
‑
四角开孔支撑架,3
‑
n字型开槽滑动块,4
‑
驱动机构,41
‑
电机支架,42
‑
伺服电机,43
‑
传动轴,44
‑
小锥齿轮,45
‑
大锥齿轮,46
‑
开孔限位支架,5
‑
摆动机构,51
‑
四角摆动架,52
‑
帆旗安装架,53
‑
第一复位弹簧,54
‑
摆动轴,55
‑
摆动球,56
‑
旋转轴,57
‑
限位架,58
‑
固定圆盘,6
‑
转速调节机构,61
‑
楔形推动块,62
‑
异型楔形推动杆,63
‑
开槽齿圈,64
‑
带圆杆四角支撑架,65
‑
第二复位弹簧,66
‑
行星齿轮,661
‑
开孔圆盘,67
‑
带长杆齿轮保持架,68
‑
铰接杆,69
‑
开孔限位圈,610
‑
太阳齿轮,611
‑
第三复位弹簧,612
‑
小卡杆,613
‑
第四复位弹簧,7
‑
飞行桨变距机构,71
‑
开孔旋转架,72
‑
转动卡环,73
‑
变
距螺旋桨,74
‑
连接杆,75
‑
旋转圈。
具体实施方式
22.为了使本发明的目的技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
23.实施例:一种可使无人机受风时更加稳定的小型推进器,如图1
‑
9所示,包括有开槽导向圆柱架1、四角开孔支撑架2、n字型开槽滑动块3、驱动机构4、摆动机构5、转速调节机构6和飞行桨变距机构7,开槽导向圆柱架1底面固接有四角开孔支撑架2,开槽导向圆柱架1上分布式滑动连接有n字型开槽滑动块3,开槽导向圆柱架1上设有用于作为无人机的动力源的驱动机构4,摆动机构5滑动式连接于n字型开槽滑动块3上,用于调节变距螺旋桨73转动速度的转速调节机构6设于摆动机构5上,用于改变变距螺旋桨73角度的飞行桨变距机构7同样设于摆动机构5上。
24.驱动机构4包括有电机支架41、伺服电机42、传动轴43、小锥齿轮44、大锥齿轮45和开孔限位支架46,开槽导向圆柱架1上固定安装有电机支架41,伺服电机42固定安装在电机支架41上,伺服电机42输出轴上固接有传动轴43,传动轴43与开槽导向圆柱架1转动式连接,远离伺服电机42的传动轴43一端固接有小锥齿轮44,四角开孔支撑架2上转动式连接有开孔限位支架46,开孔限位支架46顶面固接有大锥齿轮45,小锥齿轮44与大锥齿轮45之间相互啮合。
25.摆动机构5包括有四角摆动架51、帆旗安装架52、第一复位弹簧53、摆动轴54、摆动球55、旋转轴56、限位架57和固定圆盘58,n字型开槽滑动块3上共同滑动式连接有用于感受气流方向的四角摆动架51,四角摆动架51上分布式固接有帆旗安装架52,帆旗安装架52与n字型开槽滑动块3之间连接有第一复位弹簧53,四角摆动架51中部转动式连接有摆动轴54,摆动轴54上固接有摆动球55,摆动球55与开孔限位支架46转动式配合,两旋转轴56转动式连接于转速调节机构6上,两旋转轴56上共同固接有用于对摆动轴54进行限位的限位架57,固定圆盘58固接于远离四角摆动架51的摆动轴54下方。
26.转速调节机构6包括有楔形推动块61、异型楔形推动杆62、开槽齿圈63、带圆杆四角支撑架64、第二复位弹簧65、行星齿轮66、开孔圆盘661、带长杆齿轮保持架67、铰接杆68、开孔限位圈69、太阳齿轮610、第三复位弹簧611、小卡杆612和第四复位弹簧613,四角摆动架51底面分布式固接有楔形推动块61,楔形推动块61用于推动异型楔形推动杆62及其上装置向下运动,开孔限位支架46上滑动式连接有异型楔形推动杆62,异型楔形推动杆62底端固接有开槽齿圈63,开槽齿圈63上转动式连接有带圆杆四角支撑架64,带圆杆四角支撑架64与四角开孔支撑架2滑动式连接,带圆杆四角支撑架64与四角开孔支撑架2之间连接有第二复位弹簧65,带长杆齿轮保持架67转动式连接于开槽齿圈63上,行星齿轮66通过转轴分布式转动连接于带长杆齿轮保持架67上,开槽齿圈63与行星齿轮66相互啮合,开孔圆盘661滑动式连接于开槽齿圈63上,两旋转轴56转动式连接于开孔圆盘661上,摆动轴54上分布式铰接有铰接杆68,铰接杆68用于将摆动轴54卡紧,限位架57上固接有开孔限位圈69,铰接杆68与开孔限位圈69滑动式连接,开孔限位圈69与铰接杆68之间连接有第三复位弹簧611,开孔限位圈69顶面固接有太阳齿轮610,行星齿轮66用于带动太阳齿轮610加速旋转,开槽齿
圈63上滑动式连接有小卡杆612,小卡杆612卡入开孔圆盘661凹槽内,小卡杆612用于将开孔圆盘661卡住,小卡杆612与开槽齿圈63之间连接有第四复位弹簧613。
27.飞行桨变距机构7还包括有开孔旋转架71、转动卡环72、变距螺旋桨73、连接杆74和旋转圈75,固定圆盘58上固接有开孔旋转架71,开孔旋转架71上分布式连接有转动卡环72,转动卡环72上铰接有用于产生动力的变距螺旋桨73,变距螺旋桨73上固接有连接杆74,连接杆74与开孔旋转架71滑动式连接,远离变距螺旋桨73的连接杆74一端共同固接有旋转圈75,带长杆齿轮保持架67与旋转圈75滑动式连接。
28.此设备用于作为无人机的动力源,当无人机在高空中运作,伺服电机42提供稳定的动力,此设备四周空气气流匀速流动时,伺服电机42输出轴转动带动传动轴43及小锥齿轮44转动,从而小锥齿轮44带动大锥齿轮45及其上装置转动,进而开孔限位支架46通过异型楔形推动杆62带动开槽齿圈63及其上装置转动,开槽齿圈63通过小卡杆612带动开孔圆盘661及其上装置转动,限位架57转动带动开孔限位圈69及其上装置转动,使得铰接杆68带动摆动轴54及其上装置转动,通过固定圆盘58带动开孔旋转架71及其上装置转动,使得变距螺旋桨73缓慢转动,使得无人机稳定飞行。
29.当此设备四周空气气流流速不一致时,较强的空气气流推动一处帆旗安装架52及四角摆动架51发生偏移,四角摆动架51带动摆动轴54及其上装置摆动,摆动轴54摆动带动铰接杆68偏移。楔形推动块61与异型楔形推动杆62相互接触时,楔形推动块61推动异型楔形推动杆62及其上装置向下运动,第二复位弹簧65被拉伸,开槽齿圈63带动小卡杆612向下运动,开孔圆盘661推动小卡杆612收缩,第四复位弹簧613被压缩,小卡杆612不再将开孔圆盘661卡住,开槽齿圈63不再带动开孔圆盘661及其上装置转动,此时行星齿轮66恰好与太阳齿轮610相互啮合,开槽齿圈63通过行星齿轮66带动太阳齿轮610及其上装置转动,根据开槽齿圈63、行星齿轮66与太阳齿轮610之间的齿数可知,行星齿轮66带动太阳齿轮610加速旋转,进而使得摆动轴54通过固定圆盘58带动开孔旋转架71及其上装置快速转动,变距螺旋桨73快速转动使得空气流速差越大,变距螺旋桨73下方气流压力大于变距螺旋桨73上方气流压力,变距螺旋桨73快速转动产生的推力越大,使得无人机飞行越稳定。开槽齿圈63带动带长杆齿轮保持架67向下运动时,带长杆齿轮保持架67推动旋转圈75及其上装置向下运动,使得连接杆74带动变距螺旋桨73向下摆动,变距螺旋桨73角度发生偏转,使得变距螺旋桨73转动效率提高,使无人机能够在不同气流流速中运行,充分地保证了无人机稳定飞行。
30.当此设备四周空气气流速流一致时,第一复位弹簧53复位带动四角摆动架51复位,四角摆动架51带动摆动轴54及其上装置摆动复位,第三复位弹簧611复位带动铰接杆68复位,楔形推动块61与异型楔形推动杆62分离,被拉伸的第二复位弹簧65复位带动带圆杆四角支撑架64及其上装置向上运动复位,行星齿轮66与太阳齿轮610分离,开槽齿圈63带动小卡杆612向上运动,被压缩的第四复位弹簧613复位带动小卡杆612复位,小卡杆612卡入开槽齿圈63凹槽,随后设备各个零部件均复位,重复上述操作,使得无人机稳定飞行。当无人机停止运行时,工作人员手动关闭伺服电机42,使得此设备停止运行。
31.以上结合附图对本发明的实施例进行了描述,但是本发明并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,而不是限制性的,本领域的普通技术人员在本发明的启示下,在不脱离本发明宗旨和权利要求所保护的范围情况下,还可做出很多
形式,这些均属于本发明的保护之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1