无人机货物转运系统和建筑物的制作方法
1.本公开涉及机械人技术领域,具体地,涉及一种无人机货物转运系统和建筑物。
背景技术:
2.机械臂是指高精度、多输入、多输出、高度非线性、强耦合的复杂系统。因其独特的操作灵活性,已在工业装配、安全防爆等领域得到广泛应用。
3.目前,市场中的搬运机械人多采用六自由度机械臂,机械臂的末端连接执行器,可以工作于多种应用场景,具有通用性好、精度高的特点。然而,六自由度机械臂占用空间较大,同时工作所需空间较大,并不适用在狭小的空间中进行货物搬运,并且对于任务量不大且不需要连续的重复性工作的外卖场景中,其经济效益被大量浪费。
4.对于市场中的另一种scara(selective compliance assembly robot arm,中文译名:选择顺应性装配机器手臂)机器人,其成本较低,但其负载能力和运动空间都很小,不适用于外卖场景。
技术实现要素:
5.本公开的目的是提供一种无人机货物转运系统和建筑物,适于在狭小空间内完成货物的交接。
6.为了实现上述目的,本公开提供一种无人机货物转运系统,包括用于对接无人机的货物传送机构和设备间,所述货物传送机构的竖直输送模块延伸进所述设备间内,所述设备间内还设置有用于对接无人车的接驳机构,所述接驳机构内设置有多轴机器人,以在所述竖直输送模块和停放在所述设备间外的无人车之间传送货物。
7.可选地,所述多轴机器人包括基座、回转臂、升降臂、伸缩臂和搬运装置,所述回转臂绕第一竖直轴线可回转地安装于所述基座,所述升降臂沿竖直方向可移动地安装于所述回转臂,所述伸缩臂包括远端部分和近端部分,所述远端部分绕第二竖直轴线可枢转地连接于所述升降臂的末端,所述近端部分可移动地连接于所述远端部分并设置所述搬运装置。
8.可选地,所述回转臂可沿横向移动地安装于所述基座,以用于接近或远离所述无人车。
9.可选地,所述多轴机器人包括驱动机构,所述驱动机构包括:用于驱动所述回转臂沿横向移动的第一驱动机构,用于驱动所述回转臂回转的第二驱动机构,用于驱动所述升降臂沿所述竖直方向移动的第三驱动机构,用于驱动所述远端部分枢转的第四驱动机构,以及用于驱动所述近端部分靠近或远离所述远端部分的第五驱动机构。
10.可选地,所述基座沿横向延伸,所述第一驱动机构设置于所述基座且其输出端与所述回转臂连接,所述回转臂的底部设置有用于安装所述第二驱动机构的安装座,所述基座上设置有沿所述横向延伸的开槽,所述第一驱动机构的输出端伸出于所述开槽并与所述安装座连接。
11.可选地,所述升降臂设置有安装通孔,所述回转臂穿设于所述安装通孔并与所述升降臂之间设置有引导结构。
12.可选地,所述第一驱动机构和/或所述第三驱动机构和/或所述第五驱动机构构造为直线模组,所述第二驱动机构和/或所述第四驱动机构构造为旋转电机。
13.可选地,所述升降臂包括与所述回转臂连接的连接端,所述连接端设置有配重块。
14.可选地,所述搬运装置包括两个夹持臂和驱动装置,所述驱动装置用于驱动两个所述夹持臂相互靠近或远离。
15.在上述技术方案的基础上,本公开还提供一种建筑物,所述建筑物设置有电井,所述电井中设置有上述无人机货物转运系统,所述设备间位于所述电井的底部,所述设备间外形成有用于无人车停放的停车区。
16.通过上述技术方案,本公开提供的无人机货物转运系统能够实现在无人机和无人车之后转运货物,在工作时,从无人机上卸载下来的货物通过货物传送机构的竖直输送模块送至设备间内,位于设备间内的多轴机器人将货物从竖直输送模块传动至设备间外的无人车中,此外,位于无人车中的货物也能够通过多轴机器人传送至竖直输送模块并通过竖直输送模块将货物传送至无人机中。通过本公开提供的无人机货物转运系统能够实现在狭小空间内交接货物,满足无人机与无人车的对接需求。
17.本公开的其他特征和优点将在随后的具体实施方式部分予以详细说明。
附图说明
18.附图是用来提供对本公开的进一步理解,并且构成说明书的一部分,与下面的具体实施方式一起用于解释本公开,但并不构成对本公开的限制。在附图中:
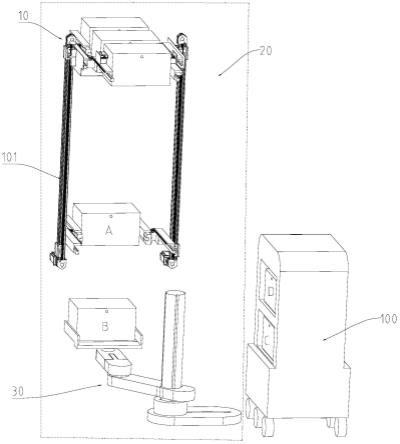
19.图1是本公开实施例提供的无人机货物转运系统的结构示意图;
20.图2是本公开实施例提供的无人机货物转运系统中的多轴机器人的结构示意图。
21.附图标记说明
22.10-货物传送机构;101-竖直输送模块;20-设备间;30-多轴机器人;301-基座;3011-开槽;302-回转臂;303-升降臂;304-伸缩臂;3041-远端部分;3042-近端部分;305-搬运装置;3051-夹持臂;306-安装座;307-配重块;100-无人车。
具体实施方式
23.以下结合附图对本公开的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本公开,并不用于限制本公开。
24.在本公开中,在未作相反说明的情况下,使用的方位词如“内、外”是指相对于对应的部件自身轮廓而言的“内、外”。另外,“远端部分3041”和“近端部分3042”中的方位词“远、近”是以伸缩臂304相对于货物的位置进行定义的,靠近货物的方位为“近”,远离货物的方位为“远”。此外,本公开该所使用的术语“第一”、“第二”、“第三”、“第四”、“第五”等是为了区分一个要素和另一个要素,不具有顺序性和重要性。此外,在下面的描述中,当涉及到附图时,除非另有解释,不同的附图中相同的附图标记表示相同或相似的要素。上述定义仅用于解释和说明本公开,不应当理解为对本公开的限制。
25.根据本公开的具体实施方式,参考图1和图2中所示,提供一种无人机货物转运系
统,包括用于对接无人机的货物传送机构10和设备间20,所述货物传送机构10的竖直输送模块101延伸进所述设备间20内,所述设备间20内还设置有用于对接无人车100的接驳机构,所述接驳机构内设置有多轴机器人30,以在所述竖直输送模块101和停放在所述设备间20外的无人车100之间传送货物。
26.通过上述技术方案,本公开提供的无人机货物转运系统能够实现在无人机和无人车100之后转运货物,在工作时,从无人机上卸载下来的货物通过货物传送机构10的竖直输送模块101送至设备间20内,位于设备间20内的多轴机器人30将货物从竖直输送模块101传动至设备间20外的无人车100中,此外,位于无人车100中的货物也能够通过多轴机器人30传送至竖直输送模块101并通过竖直输送模块101将货物传送至无人机中。通过本公开提供的无人机货物转运系统能够实现在狭小空间内交接货物,满足无人机与无人车100的对接需求。
27.在本公开提供的具体实施方式中,多轴机器人30可以以任意合适的方式构造。可选择地,所述多轴机器人30可以包括基座301、回转臂302、升降臂303、伸缩臂304和搬运装置305,所述回转臂302绕第一竖直轴线可回转地安装于所述基座301,所述升降臂303沿竖直方向可移动地安装于所述回转臂302,所述伸缩臂304包括远端部分3041和近端部分3042,所述远端部分3041绕第二竖直轴线可枢转地连接于所述升降臂303的末端,所述近端部分3042可移动地连接于所述远端部分3041并设置所述搬运装置305。通过这种设计方式,多轴机器人30具有两个旋转关节以及两个直线运动关节,即rtrt型,其中,两个旋转关节分别是回转臂302相对于基座301的转动和伸缩臂304的远端部分3041相对于升降臂303的转动,两个直线运动关节分别是升降臂303沿竖直方向的移动和伸缩臂304的近端部分3042相对于伸缩臂304的远端部分3041的移动。通过两个旋转关节的设置,能够增加多轴机械人在无人机与无人车100的交接过程中的灵活性,有利于在狭小的空间内部和外部之间转运货物,并且无人车100的停放位置不需要设定为固定位置,也就是说,在交接货物的过程中,无人车100可以灵活地停放,还可以每次停放的位置不唯一。另外,参考图1中所示,无人车100上设置有上下两个存放货物的位置,这样,无人车100能够一次转运两个不同用户的货物或者同一用户的两个货物,有利于提高无人车100转运货物的效率,在此情况下,通过升降臂303沿竖直方向的移动,能够适于可选择地将货物存放至无人车100的两个存放位置中一者。
28.在将无人机所卸载的货物传送至无人车100的过程中,参考图1中所示,货物传送机构10中的竖直输送模块101将货物传送至图1中所示的a位置,多轴机器人30中的搬运装置305在a位置将货物夹持,并通过升降臂303沿竖直方向在回转臂302上移动,将货物从a位置传送至b位置,随后,回转臂302绕第一竖直轴线回转带动升降臂303和伸缩臂304朝向无人车100转动且伸缩臂304的远端部分3041绕第二竖直轴线转动,待转动到位后,即此时搬运装置305所夹持的货物正对于无人车100,其中,无人车100中的c位置和d位置均能够用于放置货物,升降臂303可选择地沿竖直方向移动,以将货物对准所选的货物存放位置(c位置或d位置),最后,伸缩臂304的近端部分3042相对于远端部分3041移动以将货物传送至无人车100中的c位置或d位置,完成货物的交接。
29.在将无人车100中所存放的货物传送至无人机的过程中,搬运装置305夹持位于c位置或d位置的货物,回转臂302绕第一竖直轴线回转带动升降臂303和伸缩臂304朝向竖直
输送模块101转动且伸缩臂304的远端部分3041绕第二竖直轴线转动,以将货物从c位置或d位置转运到b位置,随后,通过升降臂303沿竖直方向移动以将货物从b位置传送至a位置,最后,通过竖直输送模块101将货物从a位置传送至无人机进行装载。
30.在本公开提供的具体实施方式中,由于无人车100距离货物传送机构10的相对距离可变性较大,为了满足在货物传送机构10和无人车100之间传送货物的需求,所述回转臂302还可以设计为可沿横向移动地安装于所述基座301,以用于接近或远离所述无人车100,由此,增加多轴机器人30在横向上移动的行程,有利于实现远距离交接货物。
31.在本公开提供的具体实施方式中,为了实现多轴机器人30在竖直输送模块101和无人车100之间自动化地完成货物交接,所述多轴机器人30可以包括驱动机构,所述驱动机构包括:用于驱动所述回转臂302沿横向移动的第一驱动机构,用于驱动所述回转臂302回转的第二驱动机构,用于驱动所述升降臂303沿所述竖直方向移动的第三驱动机构,用于驱动所述远端部分3041枢转的第四驱动机构,以及用于驱动所述近端部分3042靠近或远离所述远端部分3041的第五驱动机构,通过分别控制第一驱动机构、第二驱动机构、第三驱动机构、第四驱动机构和第五驱动机构工作,即能够实现回转臂302、升降臂303和伸缩臂304运作,从而实现在竖直输送模块101和无人车100之间传送货物。
32.参考图2中所示,所述基座301沿横向延伸,所述第一驱动机构设置于所述基座301且其输出端与所述回转臂302连接,所述回转臂302的底部设置有用于安装所述第二驱动机构的安装座306,所述基座301上设置有沿所述横向延伸的开槽3011,所述第一驱动机构的输出端伸出于所述开槽3011并与所述安装座306连接,以通过第一驱动机构的驱动带动回转臂302相对于基座301在横向上的移动。其中,第一驱动机构可以以任意合适的方式构造,例如直线电机、丝杠电机模组、电动伸缩缸等,还可以构造为通过运动转换装置将电机的转动转换为线性运动,从而实现回转臂302在横向上的移动,其中的运动转换装置可以构造为丝杠螺母传动结构、曲柄滑块机构、齿轮齿条传动结构等,本公开对此不作具体限制。在本公开提供的一种实施方式中,第一驱动机构可以构造为直线模组,其中,该直线模组可以为皮带式直线模组或者丝杆式直线模组,本公开对此不作具体限制。
33.其中,第二驱动机构可以构造为旋转电机,该旋转电机的输出轴穿过所述安装座306与回转臂302同轴地连接,以驱动回转臂302绕第一竖直轴线转动。
34.在本公开提供的具体实施方式中,所述升降臂303设置有安装通孔,所述回转臂302穿设于所述安装通孔并与所述升降臂303之间设置有引导结构,以引导升降臂303沿竖直方向移动。其中,该引导结构可以以任意合适方式构造,例如相配合的滑轨和滑块等,本公开对此不作具体限制。
35.其中,第三驱动机构固设于回转臂302并且可以以与第一驱动机构相同的方式构造,为了避免重复,在此不再赘述。在本公开提供的一种实施方式中,第三驱动机构可以构造为直线模组,其中,该直线模组可以为皮带式直线模组或者丝杆式直线模组,本公开对此不作具体限制。以第三驱动机构构造为丝杆式直线模组为例,该丝杆式直线模组的螺母位于回转臂302与升降臂303之间并且与升降臂303固定连接,以带动升降臂303沿竖直方向移动。由于对空间要求最高的第三驱动机构设置在回转臂302上,这样,升降臂303和伸缩臂304能够设计成扁平状,更易于伸缩臂304及其上的搬运装置305进入小型无人车中抓取货物。
36.在本公开提供的具体实施方式中,第四驱动机构固设于升降臂303的内部并且可以构造为旋转电机,该旋转电机的输出轴穿过升降臂303以与伸缩臂304的远端部分3041相连,以驱动伸缩臂304的远端部分3041绕第二竖直轴线转动。
37.在本公开提供的具体实施方式中,第五驱动机构设置在伸缩臂304的远端部分3041和伸缩臂304的近端部分3042之间并且可以以与第一驱动机构相同的方式构造,为了避免重复,在此不再赘述。在本公开提供的一种实施方式中,第五驱动机构可以构造为直线模组,其中,该直线模组可以为皮带式直线模组或者丝杆式直线模组,本公开对此不作具体限制。以第五驱动机构构造为丝杆式直线模组为例,该丝杆式直线模组的螺母位于伸缩臂304的近端部分3042和远端部分3041之间并且与近端部分3042固定连接,以带动近端部分3042移动。
38.在本公开提供的具体实施方式中,所述升降臂303包括与所述回转臂302连接的连接端,所述连接端可以设置有配重块307,以用于尽可能抵消升降臂303、第四驱动机构、伸缩臂304、第五驱动机构以及搬运装置305产生的力矩。
39.在本公开提供的具体实施方式中,搬运装置305可以以任意合适的方式构造。可选择地,所述搬运装置305可以包括两个夹持臂3051和驱动装置,所述驱动装置用于驱动两个所述夹持臂3051相互靠近或远离,并且通过该驱动装置能够在夹持臂3051夹持货物时提供可靠地夹持力,以将货物保持在两个夹持臂3051之间。
40.在上述技术方案的基础上,本公开还提供一种建筑物,所述建筑物设置有电井,所述电井中设置有上述无人机货物转运系统,所述设备间20位于所述电井的底部,所述设备间20外形成有用于无人车100停放的停车区。本公开提供的建筑物同样具有上述特点,为了避免重复,在此不再赘述。
41.以上结合附图详细描述了本公开的优选实施方式,但是,本公开并不限于上述实施方式中的具体细节,在本公开的技术构思范围内,可以对本公开的技术方案进行多种简单变型,这些简单变型均属于本公开的保护范围。
42.另外需要说明的是,在上述具体实施方式中所描述的各个具体技术特征,在不矛盾的情况下,可以通过任何合适的方式进行组合,为了避免不必要的重复,本公开对各种可能的组合方式不再另行说明。
43.此外,本公开的各种不同的实施方式之间也可以进行任意组合,只要其不违背本公开的思想,其同样应当视为本公开所公开的内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1