一种防止飞机着陆冲出跑道的预防系统及预防方法与流程
1.本发明涉及民用飞机领域,具体是一种飞机从进近到滑行速度阶段为飞行员提供冲出跑道、跑道偏离信息,且能够实施飞机最大减速能力,飞机冲出跑道的预防方法及预防系统。
背景技术:
2.冲出跑道被列为全球商用飞机三大事故之一。这种事故很多都发生在由于污染导致刹车效应降低的跑道。事故的统计数据显示,1998年至2017年间,冲出跑道导致35%的整机损失事故,14%致命事故。
3.公开号cn 107944701 a的发明中公开了一种飞机着陆过程中冲出跑道风险的检测方法及装置,该发明通过地理位置对跑道进行匹配后,获得着陆环境,通过飞机着陆数据计算出冲出跑道的临界线,但该发明未考虑飞机减速系统状态和飞机继续着陆后立即实时最大减速的操作,在飞机减速系统发生故障时,可能冲出跑道。
4.在us 10214300b2的发明中公开了一种冲出跑道信息显示的方法和系统,该发明通过接收跑道信息以及飞机状态信息,确定飞机所需的刹车距离并在显示系统中进行显示,但该发明并未考虑飞机下降过程的偏离以及着陆点的预计,未考虑飞机减速系统状态和飞机继续着陆后立即实施最大减速,减少飞行员的反映以及操纵时间,在飞机减速系统发生故障时,可能冲出跑道。
技术实现要素:
5.为克服现有技术中存在的无法确定着陆后飞机停止所需的正常跑道距离以及最严苛跑道距离,并向飞行员提供所需跑道距离以及着陆后根据减速系统状态自动控制飞机实施减速的不足,本发明提出了一种防止飞机着陆冲出跑道的预防系统及预防方法。
6.本发明提出的预防飞机着陆冲出跑道的预防系统包括机轮刹车系统、机翼扰流板控制器、冲出跑道预防控制器、告警模块、显示模块、记录模块、地面跑道数据模块、发动机控制器、地面环境模块、速度传感器、定位模块。其中,所述冲出跑道预防控制器第一输入端口至第七输入端口依次与轮刹车系统的刹车控制器的输出端、机翼扰流板控制器的输出端、地面跑道数据模块的输出端、发动机控制器的输出端、地面环境模块的输出端、速度传感器的输出端、定位模块的输出端联通;所述冲出跑道预防控制器第一输出端口至第七输出端口分别与告警模块的输入端、显示模块的输入端、记录模块的输入端、地面跑道数据模块的输入端、机轮刹车系统的刹车控制器输入端、机翼扰流板控制器的输入端和发动机控制器的输入端联通。
7.所述冲出跑道预防控制器分别接收以下信息:机轮刹车系统发送的机轮刹车系统故障状态信息、机翼扰流板控制器发送的机翼扰流板故障状态、地面跑道数据模块发送的跑道信息、机翼扰流板、发动机反推和机轮刹车系统提供的减速率、发动机控制器故障状态信息、飞机预计着陆跑道的风向和风速、速度传感器检测的速度信息和定位模块发送的飞
机实时位置信息;将冲出跑道预防控制器接收的各信息通过ad模块进行处理。
8.所述冲出跑道预防控制器向告警模块输出听觉警告信息;向显示模块输出的飞机相对跑道的位置信息,减速到滑行速度所需跑道距离、最严苛跑道距离和偏离跑道距离,以显示飞机的地面信息;向记录模块输出系统信息,包括冲出跑道预防系统状态、飞机偏离跑道距离、机轮速度、飞机信息、跑道信息以及故障信息;向地面跑道数据模块发送机轮刹车系统、机翼扰流板和发动机的故障状态信息;
9.所述地面跑道数据模块通过故障状态信息匹配机轮刹车系统、机翼扰流板和发动机反推能够提供的飞机减速率。
10.所述冲出跑道预防控制器通过刹车电流控制刹车,实现机轮刹车;所述冲出跑道预防控制器通过开关量信号控制机翼扰流板的打开;通过所述发动机控制器,实现通过发动机反推使飞机减速。
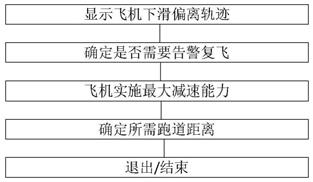
11.本发明提出的使用所述预防系统防止飞机着陆过程中冲出跑道预防的具体过程是:
12.步骤1,显示飞机下滑偏离轨迹:
13.当飞机开始下降时,冲出跑道预防系统激活;根据飞机着陆信息,预计飞机的下降轨迹,并将预计的飞机下降轨迹与设定的机场下滑道位置进行比较,判断飞机是否偏离下滑道,当预计的下降轨迹与设定的下滑道位置一致,则认为未发生偏离;当预计的下降轨迹与设定的下滑道位置不一致,则认为发生偏离。若飞机偏离下滑道,显示偏离的位置信息;若飞机未偏离下滑道,显示预期的下滑轨迹。
14.步骤2,确定是否需要告警复飞:
15.冲出跑道预防系统通过分别接收飞机机轮刹车系统、发动机反推以及机翼扰流板三者的故障状态,通过下述第二步确定飞机减速到滑行速度所需正常跑道距离以及最严苛跑道距离,如果所述正常跑道距离的长度和最严苛跑道距离的长度均小于最严苛跑道距离,提供复飞的告警信息;反之,显示飞机所需刹车距离。
16.所述确定是否需要告警复飞的具体过程如下:
17.第一步,分别获取飞机发动机反推、机轮刹车系统以及机翼扰流板三者的减速能力:
18.所述冲出跑道预防系统接收发动机的故障状态、机轮刹车系统的故障状态以及机翼扰流板的故障状态。所述的故障状态包括:发动机反推能否打开到反推的最大位置;机翼扰流板是否能够完全打开;机轮刹车系统所有通道是否能够正常刹车。
19.第二步,定义飞机接地点位置矢量以及接地速度矢量:
20.飞机下降到决断高度前冲出跑道预防系统将计算飞机接地位置、接地速度和加速度。
21.通过公式(6)、(7)和(8)计算飞机接地位置、接地速度和加速度:
[0022][0023]
[0024][0025]
其中,表示当前时刻飞机速度,表示当前时刻风速,表示当前时刻飞机加速度,t表示着陆到接地点所需的时间,为接地点的飞机速度,为飞机接地点位置信息。地面跑道数据模块根据第一步中分别接收到的机轮刹车系统、发动机反推以及机翼扰流板三者的故障状态,通过跑道以及地面环境分别匹配出发动机反推、机轮刹车系统、机翼扰流板三者能够提供的正常减速率以及最大减速率。根据所述的飞机接地位置、接地速度和加速度信息计算飞机减速到滑行速度所需正常跑道距离以及最严苛跑道距离。
[0026]
通过公式(9)和(10)计算飞机减速到滑行速度所需的正常跑道距离以及最严苛跑道距离:
[0027][0028][0029]
其中,代表地面跑道数据模块为飞机匹配的发动机反推提供的减速率,机翼扰流板提供的减速率,对应跑道上机轮刹车系统提供的减速率之和;代表发动机反推提供的最大减速率,机翼扰流板提供的最大减速率,跑道能够提供给机轮刹车系统的最大减速率之和;代表飞机减速到滑行速度所需的正常距离;代表飞机减速到滑行速度所需的最严苛距离。
[0030]
第三步,确定复飞告警:
[0031]
通过地面跑道数据模块,获取跑道信息;所述跑道信息包括跑道长度x
t
。
[0032]
冲出跑道预防系统将第二步计算得出的正常跑道距离、最严苛跑道距离与跑道长度x
t
进行比较,如果跑道长度大于等于正常跑道距离,x
t
≥x
n
时,则认为飞机能够在预定跑道内使飞机停止,通过显示模块显示飞机减速到滑行速度v
mt
时所需的跑道距离。如果跑道长度小于正常跑道距离且大于等于最严苛跑道距离,x
s
≤x
t
<x
n
时,则认为飞机应实施最大减速能力才能够使飞机在预定跑道内使飞机停止,显示飞机减速到滑行速度v
mt
时所需的跑道距离。如果跑道长度小于最严苛跑道距离,x
t
<x
s
时,显示飞机减速到滑行速度v
mt
时所需的跑道距离,并向告警系统发送信息,提示其复飞。
[0033]
步骤3,飞机实施最大减速能力:
[0034]
冲出跑道预防系统通过控制飞机机轮刹车系统、发动机反推以及机翼扰流板,在飞机接地后激活飞机机轮刹车系统、发动机反推以及机翼扰流板使飞机减速。
[0035]
所述使飞机减速的具体过程如下:
[0036]
第一步,分别获取飞机机轮刹车系统、发动机反推以及机翼扰流板的控制能力:
[0037]
第二步,分别激活发动机反推、机翼扰流板以及机轮刹车系统:
[0038]
在飞机接地后,通过发动机控制器激活发动机反推,使其反推能力达到最大,在机轮充分转动后,通过机轮刹车系统刹车控制器使机轮刹车系统在防滑工作情况下输出最大刹车能力,通过机翼扰流板控制器打开机翼扰流板进行减速。
[0039]
步骤4,确定飞机减速到滑行速度所需跑道距离:
[0040]
在飞机着陆减速过程中,确定飞机减速到滑行速度所需跑道距离,并实时显示剩余跑道距离。
[0041]
具体过程如下:
[0042]
第一步,获取飞机着陆信息:
[0043]
在确定所需跑道距离时,通过空速管和定位模块,获取飞机接地后的速度、减速度和位置信息。
[0044]
通过公式(6)、(7)和(8)计算所述飞机接地位置、接地速度和减速度:
[0045][0046][0047][0048]
其中,表示当前时刻飞机速度,表示当前时刻风速,表示当前时刻飞机加速度,t表示着陆到接地点所需的时间,为接地点的飞机速度,为飞机接地点位置信息。地面跑道数据模块根据第一步中接收到的机轮刹车系统、发动机反推以及机翼扰流板的故障状态,通过跑道以及地面环境匹配出发动机反推、机轮刹车系统、机翼扰流板能够提供的正常减速率以及最大减速率。根据所述的飞机接地位置、接地速度和加速度信息计算飞机减速到滑行速度所需正常跑道距离以及最严苛跑道距离。
[0049]
通过公式(9)和(10)计算所述飞机减速到滑行速度所需的最严苛跑道距离:
[0050][0051][0052]
其中,代表地面跑道数据模块为飞机匹配的发动机反推提供的减速率,机翼
扰流板提供的减速率,对应跑道上机轮刹车系统提供的减速率和之和;代表发动机反推提供的最大减速率,机翼扰流板提供的最大减速率,跑道能够提供给机轮刹车系统的最大减速率之和;代表飞机减速到滑行速度所需的正常跑道距离;代表飞机减速到滑行速度所需的最严苛跑道距离。
[0053]
第二步,确定飞机减速到滑行速度所需跑道距离x
n
:
[0054]
根据当前飞机速度和加速度计算飞机减速到滑行速度v
mt
所需跑道距离,跑道剩余距离为飞机当前位置到地面惯性坐标系原点的距离。
[0055]
在确定所需跑道距离时,通过公式(11)和(12)计算飞机减速到滑行速度所需跑道距离:
[0056][0057][0058]
其中,t为飞机减速到滑行速度所需时间,x
n
为飞机减速到滑行速度所需跑道距离,y
n
为飞机减速到滑行速度时偏离航向的距离。
[0059]
第三步,显示飞机减速到滑行速度时所需跑道距离:
[0060]
将确定的飞机减速到滑行速度所需跑道距离与跑道剩余距离x
l
进行比较:
[0061]
若x
l
≥x
n
,则认为飞机能够在预定的跑道内使飞机停止,显示飞机减速到滑行速度所需跑道距离以及跑道剩余距离。
[0062]
若x
l
<x
n
,则认为飞机在预定的跑道内无法停止,向飞行员提供冲出跑道告警,显示飞机减速到滑行速度所需跑道距离以及跑道剩余距离。
[0063]
第四步,显示飞机偏离:
[0064]
若飞机在地面坐标系中y
g
方向的位移绝对值|y
n
|>偏离跑道的门限值y
c
,显示飞机偏离跑道,并向飞行员提供告警信息,提示其偏离跑道。
[0065]
步骤5,退出/结束:
[0066]
所述退出/结束的具体过程如下:
[0067]
第一步,接收飞机地面速度以及机轮速度:
[0068]
在判断退出冲出跑道预防系统时,通过空速管获取飞机速度,通过机轮刹车系统分别获取飞机前机轮速度和各主机轮速度。
[0069]
第二步,冲出跑道预防系统退出/结束
[0070]
当飞机地面速度小于等于滑行速度,或前机轮速度小于等于滑行速度,或各主机轮速度小于等于滑行速度时,冲出跑道预防系统退出。在冲出跑道预防系统工作过程中,飞行员通过操纵装置终止冲出跑道预防系统。
[0071]
至此,完成防止飞机着陆过程中冲出跑道预防。
[0072]
本发明针对飞机在着陆过程中无法预知跑道所提供的距离是否满足飞机滑跑需要,以及是否存在飞机偏离跑道的情况,且无法及时采取措施应对,同时针对飞机冲出跑道
事件只能发生后分析的状况,提供一种飞机着陆过程中冲出跑道预防的方法及系统,实现了防止飞机在着陆过程中冲出跑道的事件。
[0073]
本发明在飞机进入下滑道开始预计飞机的下降轨迹,判断是否偏离下滑道;同时在决断高度预计飞机的接地点,减速到滑行速度所需的正常跑道距离以及最严苛跑道距离,对飞机复飞进行判断;同时在飞机减速过程中,预计飞机的减速距离,对飞机偏离跑道进行判断。
[0074]
与现有技术相比,本发明的优点在于:
[0075]
1.本发明从飞机进入下滑道激活,在飞机下降过程中预计飞机的飞行轨迹,与下滑道进行比较,如发生偏离,向飞行员提供偏离位置信息及告警。
[0076]
2.本发明提出了在飞机下降到决断高度时,预计飞机的着陆点信息以及减速到滑行速度所需的正常跑道距离以及最严苛跑道距离,判断其是否能够安全着陆,提示飞行员复飞。
[0077]
3.本发明提出了在飞机接地减速过程中,实时预计飞机的减速距离以及跑道剩余距离,并确定飞机是否发生偏离跑道情况,如发生则进行显示以及偏离跑道告警。
[0078]
本发明在飞机下降的过程中,确定飞机能否在机场跑道减速到滑行速度,实现了飞机在未着陆时,对所需跑道距离进行确定并显示,给飞行员以直观的提示,在其未着陆时进行复飞,降低了飞机冲出跑道的百分之十五的风险。当飞机着陆后,如果所需的最严苛的跑道距离大于跑道长度时,则在飞机接后立即实施最大减速能力,在飞机着陆后自动操纵减速系统使飞机减速,飞机的减速距离缩短了200m,降低了飞机冲出跑道的概率,并且节省了飞行员的操纵时间以及反映时间,减轻了飞行员的负担。
附图说明
[0079]
图1是本发明技术方案的示意图。
[0080]
图2是冲出跑道预防系统框图。
[0081]
图3是飞机进近轨迹图;其中,图3
‑
a是飞机已飞的轨迹以及预计的飞行轨迹;图3
‑
b是偏离下滑道的飞行轨迹。
[0082]
图4是飞机减速轨迹图;其中,图4
‑
a是跑道长度大于等于正常跑道距离时飞机减速轨迹,图4
‑
b是跑道长度小于正常跑道距离且大于等于最严苛跑道距离时飞机减速轨迹,图4
‑
c是跑道长度小于最严苛跑道距离时飞机减速轨迹。
[0083]
图5是飞机着陆减速轨迹图;其中,图5
‑
a是跑道剩余距离大于等于所需跑道距离时飞机着陆减速轨迹,图5
‑
b是所需跑道距离大于跑道剩余距离时飞机着陆减速轨迹,图5
‑
c是机在地面坐标系中y
g
方向的位移绝对值|y
n
|大于偏离航向门限值y
c
时,飞机偏离跑道的陆减速轨迹。
[0084]
图6是冲出跑道预防系统退出逻辑图;
[0085]
图7是本发明的流程图。
[0086]
图1中:1.机轮刹车系统;2.机翼扰流板控制器;3.冲出跑道预防控制器;4.告警模块;5.显示模块;6.记录模块;7.地面跑道数据模块;8.发动机控制器;9.地面环境模块;10.速度传感器;11.定位模块。12.已飞的轨迹;13.预计的飞行轨迹;14.偏离轨迹;15.偏离距离;16.最严苛跑道距离;17.正常跑道距离;18.跑道距离;19.飞机减速到滑行速度所需跑
道距离;20.跑道剩余距离;
具体实施方式
[0087]
实施例一
[0088]
所述包括机轮刹车系统1、机翼扰流板控制器2、冲出跑道预防控制器3、告警模块4、显示模块5、记录模块6、地面跑道数据模块7、发动机控制器8、地面环境模块9、速度传感器10、定位模块11。
[0089]
其中,所述机轮刹车系统1的刹车控制器的输出端与冲出跑道预防控制器3的第一输入端口联通,冲出跑道预防控制器接收机轮刹车系统发送的机轮刹车系统故障状态信息,所述冲出跑道预防控制器3的第一输入端口接收信息后通过ad模块进行处理。机翼扰流板控制器的输出端与冲出跑道预防控制器的第二输入端口联通,冲出跑道预防控制器接收机翼扰流板控制器发送的机翼扰流板故障状态,所述冲出跑道预防控制器的第二输入端口接收信息后通过ad模块进行处理。地面跑道数据模块的输出端与冲出跑道预防控制器的第三输入端口联通,冲出跑道预防控制器接收地面跑道数据模块发送的跑道信息、机翼扰流板、发动机反推和机轮刹车系统提供的减速率,所述跑道信息包括:跑道长度、接地长度、道面状态、跑道海拔、跑道角度、跑道经纬度、宽度以及飞机设定的着陆轨迹,所述冲出跑道预防控制器的第三输入端口接收信息后通过ad模块进行处理。发动机控制器的输出端与冲出跑道预防控制器的第四输入端口联通,冲出跑道预防控制器接收发动机控制器发送的发动机控制器故障状态信息,所述冲出跑道预防控制器的第四输入端口接收的信息通过ad模块进行处理。地面环境模块的输出端与冲出跑道预防控制器第五输入端口联通,地面环境模块将检测到的飞机预计着陆跑道的风向、风速发送到冲出跑道预防控制器,该冲出跑道预防控制器第五输入端口接收信息后通过ad模块进行处理。速度传感器的输出端与冲出跑道预防控制器的第六输入端口联通,冲出跑道预防控制器接收速度传感器检测的速度信息,所述速度信息包括:主机轮速度、前机轮速度、飞机速度、加速度,该冲出跑道预防控制器的第六输入端口接收信息后通过fpga模块进行处理。定位模块的输出端与冲出跑道预防控制器的第七输入端口联通,冲出跑道预防控制器接收定位模块发送的飞机实时位置信息,该冲出跑道预防控制器第七输入端口接收信息后通过ad模块进行处理。
[0090]
跑道预防控制器输出的听觉警告信息,包括警报和语音告警。显示模块的输入端与冲出跑道预防控制器的第二输出端口联通;该显示模块接收冲出跑道预防控制器输出的飞机相对跑道的位置信息,减速到滑行速度所需跑道距离、最严苛跑道距离和偏离跑道距离,用于显示飞机的地面信息。记录模块的输入端与冲出跑道预防控制器的第三输出端口联通,通过该记录模块接收并记录冲出跑道预防控制器发出的系统信息;所述系统信息包括冲出跑道预防系统状态、飞机偏离跑道距离、机轮速度、飞机信息、跑道信息以及故障信息。
[0091]
地面跑道数据模块的输入端与冲出跑道控制器的第四输出端口联通,地面跑道数据模块接收冲出跑道预防控制器发送的机轮刹车系统、机翼扰流板和发动机的故障状态信息;所述地面跑道数据模块通过故障状态信息匹配机轮刹车系统、机翼扰流板和发动机反推能够提供的飞机减速率。
[0092]
冲出跑道预防控制器的第五输出端口与机轮刹车系统的刹车控制器输入端联通。
所述冲出跑道预防控制器通过刹车电流控制刹车,实现机轮刹车。
[0093]
冲出跑道预防控制器的第六输出端口与机翼扰流板控制器的输入端联通,冲出跑道预防控制器通过开关量信号控制机翼扰流板的打开。
[0094]
冲出跑道预防控制器的第七输出端口与发动机控制器的输入端联通,冲出跑道预防控制器通过开关量信号控制发动机控制器,实现通过发动机反推使飞机减速。
[0095]
所述冲出跑道预防控制器采用现有技术,包括fpga、da模块以及ad模块进行,通过所述的fpga、da模块以及ad模块接收/传输信息,并通过cpu或dsp实现对获取信息的处理。
[0096]
所述定位模块采用gps系统或北斗星系统;地面跑道数据模块用于存储机场的跑道信息,对飞机在选定的着陆的跑道上不同故障状态的机轮刹车系统、机翼扰流板和发动机反推提供的减速率进行数据匹配,将飞机着陆的跑道信息,机轮刹车系统、机翼扰流板和发动机反推提供的减速率信息发送到冲出跑道预防控制器;地面环境模块用于将机场跑道的风速和风向发送到冲出跑道预防控制器。
[0097]
所述包括机轮刹车系统、机翼扰流板控制器、发动机控制器为现有技术。
[0098]
实施例二
[0099]
本实施例提供了一种用于飞机着陆过程中冲出跑道预防的方法,具体过程是:
[0100]
步骤1,显示飞机下滑偏离轨迹:
[0101]
当飞机开始下降时,冲出跑道预防系统激活;根据飞机着陆信息,预计飞机的下降轨迹,并将预计的飞机下降轨迹与设定的机场下滑道位置进行比较,判断飞机是否偏离下滑道,当预计的下降轨迹与设定的下滑道位置一致,则认为未发生偏离;当预计的下降轨迹与设定的下滑道位置不一致,则认为发生偏离。若飞机偏离下滑道,显示偏离的位置信息;若飞机未偏离下滑道,显示预期的下滑轨迹。
[0102]
所述步骤1具体过程如下:
[0103]
第一步,获取飞机下滑道信息:
[0104]
通过地面跑道数据模块,按常规方法获取飞机下滑道信息。
[0105]
所述飞机下滑道信息是指飞机开始下降时的数据,该下降时的数据包括地面惯性坐标系中的下滑道位置信息。通过地面跑道数据模块获得该飞机下滑道信息;该飞机下滑道信息记为其中,g为地面惯性坐标系,为飞机下滑道位置。
[0106]
所述地面惯性坐标系的坐标原点为飞机滑跑的起始点。该地面惯性坐标系中,x
g
轴与飞机运动方向相反,z
g
轴垂直向下,y
g
轴指向符合右手法则。
[0107]
第二步,确定预计的飞机下降轨迹信息:
[0108]
采用常规方法确定预计的飞机下降轨迹信息:
[0109]
当飞机下降高度达到1500ft时,冲出跑道预防系统激活。
[0110]
冲出跑道预防系统通过速度传感器获取机体坐标系的飞机实时速度,该飞机实时速度记为通过实时速度计算飞机加速度记为其中,为飞机的
速度矢量,为机体坐标系中飞机在x轴方向的速度,为机体坐标系中飞机在y轴方向的速度,为机体坐标系中飞机在z轴方向的速度,为飞机的加速度矢量,a
x
机体坐标系中飞机在x轴方向的加速度,a
y
为机体坐标系中飞机在y轴方向的加速度,a
z
为机体坐标系中飞机在z轴方向的加速度,b代表飞机机体坐标系。
[0111]
冲出跑道预防系统通过位置传感器获得飞机的实时位置信息,记为其中,为机体坐标系飞机的实时位置信息,
[0112]
冲出跑道预防系统通过地面环境模块获取地面惯性坐标系中的风速和风向,记为其中,为风的速度矢量,为地面坐标系中风在x轴方向的速度,为地面坐标系中风在y轴方向的速度,为地面坐标系中风在z轴方向的速度。
[0113]
所述飞机机体坐标系的坐标原点是飞机的质心o
b
;该飞机机体坐标系中,x
b
轴的方向与飞机机头方向一致,z
b
轴的方向垂直且指向飞机下方,y
b
轴指向符合右手法则。
[0114]
通过公式(1)将机体坐标系转换到地面惯性坐标系:
[0115][0116]
其中,是飞机滚转角,θ是俯仰角,是偏航角,m
gb
是机体坐标系转换到地面惯性坐标系。
[0117]
通过公式(2)和(3)确定飞机的下降轨迹:
[0118][0119][0120]
其中,x为飞机的预计下降轨迹在地面惯性坐标系x
g
轴的位置信息,y为飞机的预计下降轨迹在地面惯性坐标系y
g
轴的位置信息,为获得的飞机下滑道在地面惯性坐标系x
g
轴的位置信息,为获得的飞机下滑道在地面惯性坐标系y
g
轴的位置信息。
[0121]
第三步,判断预计的飞机下降轨迹是否偏离下滑道:
[0122]
采用常规方法判断预计的飞机下降轨迹是否偏离下滑道。
[0123]
采用常规方法判断预计的飞机下降轨迹是否偏离下滑道,并通过显示模块5显示飞机已飞的轨迹以及预计的飞行轨迹,如图3
‑
a所示,图中分别显示出机已飞的轨迹12和预计的飞行轨迹13。
[0124]
通过公式(4)和(5)判断预计的飞机下降轨迹是否偏离下滑道:
[0125]
[0126][0127]
其中,为第一步中获取的下滑道的位置;x、y为第二步中计算得出的预计的飞机下降轨迹;r
xc
、r
yc
是常数值;
[0128]
对偏离轨迹进行显示,并向告警系统发送信息,提示偏离下滑道,按照第二步预计的着陆点轨迹,通过显示模块显示偏离下滑道的距离,如图3
‑
b所示。图3
‑
b中,显示了已飞的轨迹12、预计的飞行轨迹13、偏离轨迹14和偏离距离15。
[0129]
若判断飞机下降轨迹偏离下滑道,则显示飞机偏离位置并告警。
[0130]
本实施例中所述r
xc
为5m,所述r
yc
为3m。
[0131]
步骤2,确定是否需要告警复飞:
[0132]
冲出跑道预防系统通过分别接收飞机机轮刹车系统、发动机反推以及机翼扰流板三者的故障状态,通过下述第二步确定飞机减速到滑行速度所需正常跑道距离以及最严苛跑道距离,如果所述正常跑道距离的长度和最严苛跑道距离的长度均小于最严苛跑道距离,提供复飞的告警信息;反之,显示飞机所需刹车距离。
[0133]
所述步骤2具体过程如下:
[0134]
第一步,分别获取飞机发动机反推是否正常工作、机轮刹车系统、机翼扰流板三者的减速能力:
[0135]
所述冲出跑道预防系统按常规方法分别获取发动机的故障状态、机轮刹车系统的故障状态以及机翼扰流板的故障状态。所述的故障状态包括:发动机是否能够打开到反推的最大位置;机翼扰流板是否能够完全打开;机轮刹车系统所有通道是否能够正常刹车。
[0136]
第二步,定义飞机接地点位置矢量以及接地速度矢量:
[0137]
飞机下降到决断高度前冲出跑道预防系统将计算飞机接地位置、接地速度和加速度。在本实施例中决断高度定义为200ft。
[0138]
通过公式(6)、(7)和(8)计算飞机接地位置、接地速度和加速度:
[0139][0140][0141][0142]
其中,表示当前时刻飞机速度,表示当前时刻风速,表示当前时刻飞机加速度,t表示着陆到接地点所需的时间,为接地点的飞机速度,为飞机接地点位置信息。地面跑道数据模块根据第一步中分别收到的机轮刹车系统、发动机反推以及机翼扰流板三者的故障状态,通过跑道以及地面环境分别匹配出发动机反推、机轮刹车系统、机翼扰流板三者能够提供的正常减速率以及最大减速率。根据所述的飞机接地位置、接地速度和加速度信息计算飞机减速到滑行速度所需正常跑道距离以及最严苛跑道距离。
[0143]
通过公式(9)和(10)计算飞机减速到滑行速度所需的正常跑道距离以及最严苛跑道距离:
[0144][0145][0146]
其中,代表地面跑道数据模块为飞机匹配的发动机反推提供的减速率、机翼扰流板提供的减速率、以及对应跑道上机轮刹车系统提供的减速率之和;为发动机反推提供的最大减速率、机翼扰流板提供的最大减速率,以及机轮刹车系统提供的最大减速率之和;为飞机减速到滑行速度所需的正常跑道距离;为飞机减速到滑行速度所需的最严苛跑道距离。
[0147]
第三步,确定复飞告警:
[0148]
通过地面跑道数据模块,获取跑道信息;所述跑道信息包括跑道距离x
t
。
[0149]
冲出跑道预防系统将第二步计算得出的正常跑道距离、最严苛跑道距离与跑道长度x
t
进行比较,如果跑道长度大于等于正常跑道距离,x
t
≥x
n
时,则认为飞机能够在预定跑道内使飞机停止,通过显示模块显示飞机减速到滑行速度v
mt
时所需的跑道距离,如图4
‑
a所示。图4
‑
a中,显示了正常跑道距离17、最严苛跑道距离16和跑道长度18。如果跑道长度小于正常跑道距离且大于等于最严苛跑道距离,x
s
≤x
t
<x
n
时,则认为飞机应实施最大减速能力才能够使飞机在预定跑道内使飞机停止,显示飞机减速到滑行速度v
mt
时所需的跑道距离,如图4
‑
b所示。图4
‑
b中,显示了正常跑道距离17、最严苛跑道距离16和跑道长度18。如果跑道长度小于最严苛跑道距离,x
t
<x
s
时,显示飞机减速到滑行速度v
mt
时所需的跑道距离,如图4
‑
c所示,并向告警系统发送信息,提示其复飞。图4
‑
c中,显示了正常跑道距离17、最严苛跑道距离16以及跑道长度18。
[0150]
所述滑行速度v
mt
根据不同机型进行设定,本实施例中为60km/h。
[0151]
如果飞机冲出跑道预防系统在步骤2,第三步中提示复飞,飞行员实施复飞操作,退出冲出跑道预防系统;如果飞行员未进行复飞,继续着陆则进入步骤3。如果飞机冲出跑道预防系统在步骤2,第三步中未提示复飞,则进行步骤4。
[0152]
步骤3,飞机实施最大减速能力:
[0153]
冲出跑道预防系统通过分别控制飞机机轮刹车系统、发动机反推以及机翼扰流板,在飞机接地后分别激活飞机机轮刹车系统、发动机反推以及机翼扰流板使飞机减速。
[0154]
所述使飞机减速的具体过程是:
[0155]
第一步,分别获取飞机机轮刹车系统、发动机反推以及机翼扰流板三者的控制能力:
[0156]
第二步,分别激活发动机反推、机翼扰流板以及机轮刹车系统:
[0157]
在飞机接地后,通过发动机控制器激活发动机反推,使其反推能力达到最大,在机轮充分转动后,通过机轮刹车系统刹车控制器使机轮刹车系统在防滑工作情况下输出最大刹车能力,通过机翼扰流板控制器打开机翼扰流板进行减速。
[0158]
步骤4,确定飞机减速到滑行速度所需跑道距离:
[0159]
在飞机着陆减速过程中,确定飞机减速到滑行速度所需跑道距离,并实时显示剩余跑道距离。
[0160]
所述步骤4具体过程如下:
[0161]
第一步,获取飞机着陆信息:
[0162]
在确定所需跑道距离时,通过空速管和定位模块,获取飞机接地后的速度、减速度和位置信息。
[0163]
第二步,确定飞机减速到滑行速度所需跑道距离:
[0164]
根据当前飞机速度和加速度计算飞机减速到滑行速度v
mt
所需跑道距离,跑道剩余距离为飞机当前位置到地面惯性坐标系原点的距离。
[0165]
通过公式(11)和(12)计算飞机减速到滑行速度所需跑道距离:
[0166][0167][0168]
其中,t为飞机减速到滑行速度所需时间,x
n
为飞机减速到滑行速度所需跑道距离,y
n
为飞机减速到滑行速度时偏离航向的距离。
[0169]
第三步,显示飞机减速到滑行速度所需跑道距离x
n
:
[0170]
将第二步得到的飞机减速到滑行速度所需跑道距离与跑道剩余距离x
l
进行比较。如果跑道剩余距离大于等于飞机减速到滑行速度所需跑道距离x
n
,x
l
≥x
n
时,则认为飞机能够在预定的跑道内使飞机停止,通过显示模块显示所需跑道距离,如图5
‑
a所示。图5
‑
a中,显示了飞机减速到滑行速度所需跑道距离19以及跑道剩余距离20。
[0171]
如果第二步得到的所需跑道距离大于跑道剩余距离,x
l
<x
n
时,则认为飞机在预定的跑道内无法停止,向飞行员提供冲出跑道告警,通过显示模块显示所需跑道距离,如图5
‑
b所示。图5
‑
b中,显示了飞机减速到滑行速度所需跑道距离19以及跑道剩余距离20。
[0172]
第四步,判断是否提供偏离航向告警
[0173]
如果飞机在地面坐标系中y
g
方向的位移绝对值|y
n
|大于偏离航向门限值y
c
,|y
n
|>y
c
时,通过显示模块显示飞机偏离航向的距离,如图5
‑
c所示,并向飞行员提供告警信息,提示其偏离航向。图5
‑
c中,显示了偏离距离15、跑道剩余距离20、飞机减速到滑行速度所需跑道距离19。
[0174]
通过显示模块显示飞机减速到滑行速度v
mt
时所需的跑道距离,如图4
‑
a所示。图4
‑
a中,显示了正常跑道距离17、最严苛跑道距离16和跑道长度18。
[0175]
步骤5,退出/结束:
[0176]
所述步骤5具体过程如下:
[0177]
第一步,接收飞机地面速度以及机轮速度:
[0178]
在判断退出冲出跑道预防系统时,通过飞控系统获取飞机速度,通过机轮刹车系统分别获取飞机前机轮速度和各主机轮速度。
[0179]
第二步,冲出跑道预防系统退出/结束:
[0180]
当飞机地面速度小于等于滑行速度,或前机轮速度小于等于滑行速度,或各主机轮速度均小于等于滑行速度时,退出冲出跑道预防系统。在冲出跑道预防系统工作过程中,飞行员通过操纵装置终止冲出跑道预防系统。
[0181]
至此,完成防止飞机着陆过程中冲出跑道预防。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1