一种用于航天维修的多功能末端执行器的制作方法
1.本发明涉及卫星维修技术领域,具体而言,涉及一种用于航天维修的多功能末端执行器。
背景技术:
2.主流在轨卫星的动力来源主要为太阳能帆板,对于使用太阳能帆板的卫星来说,经常面临的问题就是太阳能帆板不能展开,使得卫星无法利用太阳能,最终能量耗尽而停止工作。一旦出现此类情况,需要发射一颗工具卫星与问题卫星对接,然后利用工具卫星上的机械臂将太阳能帆板打开或者领用工具卫星上的机械臂维修在轨卫星发生的气体故障,此类机械臂有刚性机械臂和软体机械类两类。对于刚性机械臂(比如申请公布号为cn110395414a的发明专利申请就公开了一种六轴空间机械臂,比如申请公布号为cn112357130a的发明专利申请公开了一种卫星机械臂末端与维修模块标准化接口装置),机械臂体积大,重量大,工作空间大,灵活性差,由于工具卫星整体具有极高的精密性,且能提供的工作空间十分狭小,因此刚性机械臂不能很好的完成将太阳能帆板展开的任务,具有局限性。对于软体机械臂,目前缺少能够实现指定维修动作的末端执行器,限制了软体机械臂的应用。
技术实现要素:
3.本发明就是为了解决目前缺少能够安装到软体机械臂末端的执行器,可以针对卫星太阳能帆板不能展开问题进行维修或其他故障进行维修的技术问题,提供了一种可以安装在软体机械臂末端,能够完成对航天设备专用连接器的安装拆卸任务,并能实现对其进行通电加热,恢复设备正常功能的用于航天维修的多功能末端执行器。
4.本发明提供的一种用于航天维修的多功能末端执行器,包括圆柱壳体、抓手机构、升降机构、传动轮系、减速齿轮箱、升降电机、抓手电机和底板;
5.圆柱壳体包括固定连接在一起的上壳体与下壳体;
6.下壳体设有第一层安装板和第二层安装板,第二层安装板设有孔;底板与下壳体的下部固定了连接;
7.减速齿轮箱与下壳体的第一层安装板固定连接;
8.底板设有第一安装孔和第二安装孔,减速齿轮箱的输出轴的下端与第二安装孔转动连接;
9.抓手机构包括抓手底座、摩擦齿轮、左记忆合金弹簧、右记忆合金弹簧、左抓手、右抓手、左滚轮和右滚轮,抓手底座设有容纳腔,摩擦齿轮位于抓手底座的容纳腔中;抓手底座的前部设有左抓手连接板和右抓手连接板;左抓手与左抓手连接板转动连接,右抓手与右抓手连接板转动连接;左抓手连接板和右抓手连接板之间设有间距;左记忆合金弹簧的一端与抓手底座的左半边连接,另一端与左抓手连接;右记忆合金弹簧的一端与抓手底座的右半边连接,另一端与右抓手连接;左滚轮与左抓手连接,右滚轮与右抓手连接;左滚轮
和右滚轮之间设有间距;左抓手设有左弧面,右抓手设有右弧面,左弧面和右弧面对称布置;
10.升降机构包括内层套筒、中层套筒、外层套筒、驱动轴和连接轴,外层套筒设有贯穿壳体的第一螺旋槽和第二螺旋槽;外层套筒的顶端与上壳体的顶部固定连接,外层套筒的底端与下壳体的第一层安装板固定连接;中层套筒设有相对布置的第一z形槽和第二z形槽,连接轴与中层套筒的底部固定连接;连接轴的下端与第二层安装板上的孔转动连接,外层套筒套在中层套筒上,中层套筒套在内层套筒上;驱动轴的左端穿过内层套筒的第一z形槽并嵌入外层套筒的第一螺旋槽中,驱动轴的右端穿过内层套筒的第二z形槽并嵌入外层套筒的第二螺旋槽中;驱动轴与内层套筒的底部固定连接;内层套筒顶部设有安装板;
11.抓手底座与内层套筒顶部的安装板固定连接;抓手电机连接于升降机构的内层套筒中,抓手电机的输出轴同时与摩擦齿轮相连接;
12.传动轮系包括从动轮、中间轮、主动轮和转轴,转轴的下端与底板的第一安装孔转动连接;从动轮与中层套筒底部的连接轴连接;中间轮的中心与转轴固定连接,中间轮与从动轮相互啮合;主动轮与减速齿轮箱的输出轴连接,主动轮与中间轮相互啮合;升降电机与减速齿轮箱的外壳的顶部连接,升降电机的输出轴与减速齿轮箱的输入轴连接;
13.升降机构的连接轴与从动轮连接。
14.优选地,抓手底座设有花键槽,内层套筒顶部的安装板设有花键,抓手底座的花键槽与内层套筒顶部的安装板上的花键连接。
15.优选地,上壳体的顶部设有花键孔,外层套筒设有外壁顶端花键和外壁底端花键,外层套筒的外壁顶端花键与上壳体顶部的花键孔连接;
16.下壳体的第一层安装板上设有花键槽,外壁底端花键与下壳体的第一层安装板上的花键槽连接。
17.优选地,下壳体设有第三层安装板,第三层安装板为三个沿圆周方向均匀分布的具有凹槽的圆弧板,分别是第一具有凹槽的圆弧板、第二具有凹槽的圆弧板、第三具有凹槽的圆弧板;底板的边缘嵌入第一具有凹槽的圆弧板的凹槽、第二具有凹槽的圆弧板的凹槽和第三具有凹槽的圆弧板的凹槽中。
18.优选地,第一层安装板设有矩形槽,减速齿轮箱与第一层安装板上矩形槽连接。
19.优选地,从动轮设有花键槽,连接轴上设有花键,连接轴上的花键与从动轮上的花键槽连接。
20.优选地,抓手底座连接有插头。
21.本发明的有益效果是,结构巧妙,运行稳定可靠,能够占用较小的空间,能有效实现航天设备专用连接器的安装、拆卸和实现对其进行通电加热。
22.使用独特的升降机构能够实现拆卸装置的匀速升降,通过夹持机构实现专用连接器的固定,最终通过摩擦轮快速完成专用连接器的拆卸。
23.本发明进一步的特征,将在以下具体实施方式的描述中,得以清楚地记载。
附图说明
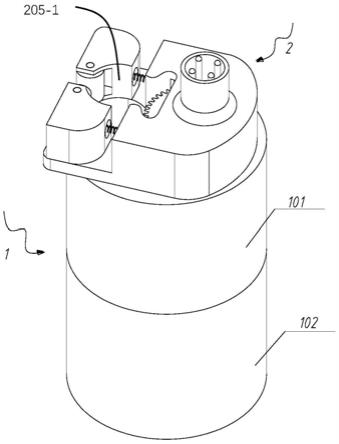
24.图1是本发明末端执行器的整体结构示意图;
25.图2去除外部圆柱壳体与抓手机构后的内部结构示意图;
26.图3是抓手机构示意图;
27.图4是抓手底座整体外观示意图;
28.图5是抓手机构底座内部结构示意图;
29.图6是抓手底座仰视图;
30.图7是安装底板示意图;
31.图8是安装底板位于下壳体的示意图;
32.图9是升降机构外层套筒示意图;
33.图10是升降机构中层套筒示意图;
34.图11是升降机构中层套筒全剖示意图;
35.图12是升降机构内层套筒示意图;
36.图13是内层套筒与驱动轴安装局部示意图;
37.图14是上壳体与外层套筒安装示意图;
38.图15是上壳体的结构示意图,其中图(a)是上壳体的俯视图,图(b)是上壳体的剖视图;
39.图16是下壳体的俯视图与全剖视图示意图;
40.图17是抓手机构与抓手电机以及内层套筒的安装示意图;
41.图18是执行器的内层套筒伸出,抓手底座随之伸出向航天插头方向运动,作用在航天插头上的示意图;
42.图19是执行器与柔性机械臂安装示意图;
43.图20是中层套筒的立体图;
44.图21是下壳体的仰视图;
45.图中符号说明:
46.1.圆柱壳体,101.上壳体,101
‑
1.花键孔,102.下壳体,102
‑
1.矩形槽,102
‑
2.花键槽,102
‑
3.第一具有凹槽的圆弧板,102
‑
4.第二具有凹槽的圆弧板,102
‑
5.第三具有凹槽的圆弧板,102
‑
6.孔;2.抓手机构,201.抓手底座,201
‑
1.容纳腔,201
‑
2.左抓手连接板,201
‑
3.轴,201
‑
4.轴,201
‑
5.左弹簧连接孔,201
‑
6.右弹簧连接孔,201
‑
7.花键槽,201
‑
8.右抓手连接板,201
‑
9.插头;202.摩擦齿轮,203.左记忆合金弹簧,204.右记忆合金弹簧,205.左抓手.205
‑
1.左弧面,206.右抓手,207.左滚轮,208.右滚轮,3.升降机构,301.内层套筒,301
‑
1.安装板,301
‑1‑
1.花键,301
‑
2.安装孔,302.中层套筒,302
‑
1.第一z形槽,302
‑
2.第二z形槽,303外层套筒,303
‑
1.外壁顶端花键,303
‑
2.外壁底端花键,303
‑
3.螺旋槽,304.驱动轴,305.连接轴;4.传动轮系,401.从动轮,402.中间轮,403.主动轮,411.转轴,5.减速齿轮箱,512.输出轴,6.升降电机,7.底板,701.第一安装孔,702.第二安装孔,8.抓手电机,9.航天插头,10.柔性机械臂。
具体实施方式
47.以下参照附图,以具体实施例对本发明作进一步详细说明。
48.如图1、图2和图18所示,本发明公开的末端执行器包括圆柱壳体1、抓手机构2、升降机构3、传动轮系4、减速齿轮箱5、升降电机6、底板7、抓手电机8,抓手机构2安装在圆柱壳体1的顶端,其余机构位于圆柱壳体1的腔室内。
49.如图1所示,圆柱壳体1包含两部分,分别为上壳体101与下壳体102。上壳体101与下壳体102固定连接。如图15所示,上壳体101的顶部具有花键孔101
‑
1。如图14所示,上壳体101顶部的花键孔101
‑
1与外层套筒303顶端的外壁顶端花键303
‑
1相互连接配合。
50.下壳体102从顶端至底部分布有三层安装板。从上向下,第一层安装板上的矩形槽102
‑
1用来安装减速齿轮箱5,第一层安装板上的花键槽102
‑
2用来安装外层套筒303(外层套筒303的外壁底端花键303
‑
2与花键槽102
‑
2连接配合)。第二层安装板用来安装中层套筒302,连接轴305的下端与第二层安装板上的孔102
‑
6转动连接。结合图21所示,第三层安装板为三个沿圆周方向均匀分布的具有凹槽的圆弧板,分别是第一具有凹槽的圆弧板102
‑
3、第二具有凹槽的圆弧板102
‑
4、第三具有凹槽的圆弧板102
‑
5,从图16中可以看出第二具有凹槽的圆弧板102
‑
4具有沿径向方向的凹槽。第三层安装板用来安装底板7。底板7的边缘嵌入第一具有凹槽的圆弧板102
‑
3的凹槽中、第二具有凹槽的圆弧板102
‑
4的凹槽中、第三具有凹槽的圆弧板102
‑
5的凹槽中。
51.如图7所示,底板7设有第一安装孔701、第二安装孔702。如图8所示,底板7位于下壳体102的第三层安装板内。减速齿轮箱5的输出轴512的下端插入第二安装孔702中,输出轴512的下端在第二安装孔702中旋转。
52.如图1、图3和图4所示,抓手机构2包括抓手底座201、摩擦齿轮202、左记忆合金弹簧203、右记忆合金弹簧204、左抓手205、右抓手206、左滚轮207、右滚轮208。如图4、5和图6所示,抓手底座201内部的容纳腔201
‑
1用来安装摩擦齿轮202,与为夹持航天插头提供空间的作用。同时,抓手底座顶端连接有插头201
‑
9,能够与拆卸后的航空插头相连接,起到通电加热的作用。如图1和图17所示,抓手底座201通过花键配合安装在内层套筒301的上表面,同时抓手底座201位于上壳体101的上表面。如图17所示,摩擦齿轮202位于抓手底座201的容纳腔201
‑
1中,同时摩擦齿轮202通过孔安装在抓手电机8的输出轴上。如图3和图4所示,左抓手205通过其底部的孔安装在抓手底座201前部的左抓手连接板201
‑
2上的轴201
‑
3上,左抓手205能够实现转动,右抓手206通过其底部的孔安装在抓手底座201前部的右抓手连接板201
‑
8上的轴201
‑
4上,右抓手206能够实现转动。左抓手连接板201
‑
2和右抓手连接板201
‑
8之间存在一定间距。左记忆合金弹簧203一端连接在抓手底座201左半边的左弹簧连接孔201
‑
5中,另一端连接在左抓手205侧面的孔中。右记忆合金弹簧204一端连接在抓手底座201右半边的右弹簧连接孔201
‑
6中,另一端连接在右抓手206侧面的孔中。左滚轮207连接在左抓手205上,右滚轮208连接在右抓手208上。左滚轮207和右滚轮208之间存在一定间距。如图1所示,左抓手205设有左弧面205
‑
1,同样的,右抓手206也设有右弧面,左弧面205
‑
1和右弧面对称布置。
53.如图2所示,升降机构包括内层套筒301,中层套筒302,外层套筒303,驱动轴304、连接轴305。如图9所示,外层套筒303包括外壁顶端花键303
‑
1、外壁底端花键303
‑
2以及贯穿壳体的两组螺旋槽303
‑
3,两组螺旋槽303
‑
3分别是第一螺旋槽和第二螺旋槽。如图14所示,外层套筒303通过外壁顶端花键303
‑
1与上壳体101顶端的花键孔101
‑
1连接在一起。如图16所示,外层套筒303的外壁底端花键303
‑
2安装在下壳体102的第一层安装板的花键槽中。中层套筒302套在内层套筒301上,内层套筒301位于中层套筒302的内部。
54.如图10和图11和图20所示,中层套筒302设有两个贯穿壳体的z形槽,分别是第一z形槽302
‑
1、第二z形槽302
‑
2,两个z形槽相对布置,连接轴305与中层套筒302的底部固定连
接。连接轴305上设有花键305
‑
1。如图2所示,连接轴305上的花键305
‑
1与从动轮401上的花键槽连接配合,同时外层套筒303套在中层套筒302上,中层套筒302位于外层套筒303内部。驱动轴304的左端穿过内层套筒302的第一z形槽302
‑
1并嵌入外层套筒303的第一螺旋槽中,驱动轴304的右端穿过内层套筒302的第二z形槽302
‑
2并嵌入外层套筒303的第二螺旋槽中。如图2和图12和图13所示,内层套筒301底部的两侧设有分别设有安装孔301
‑
2,一共有两个安装孔301
‑
2并对称布置,驱动轴304穿过两个安装孔301
‑
2实现驱动轴304与内层套筒301的底部固定连接。同时内层套筒301还应位于中层套筒302中。如图17所示,抓手底座201通过花键槽201
‑
7与内层套筒301顶部的安装板301
‑
1上的花键301
‑1‑
1连接配合。
55.连接轴305旋转带动中层套筒302旋转,驱动轴304受力进而内层套筒301从中层套筒302中伸出按图2向上运动。连接轴305反转时能让内层套筒301缩回,也就是说连接轴305旋转能够使内层套筒301顶部的安装板301
‑
1升降。
56.如图2和图7所示,传动轮系4包括从动轮401、中间轮402、主动轮403、转轴411。转轴411的下端与底板7第一安装孔701转动连接。从动轮401上的花键槽与中层套筒302底部的连接轴305上的花键305
‑
1连接。中间轮402的中心与转轴411固定连接,中间轮402与从动轮401相互啮合。主动轮403安装在减速齿轮箱5的输出轴512上,主动轮403与中间轮402相互啮合。
57.如图2所示,升降电机6安装在减速齿轮箱5的外壳的顶部,升降电机6的输出轴与减速齿轮箱5的输入轴连接。如图17所示,抓手电机8安装在升降机构3的内层套筒301中,抓手电机8的输出轴同时与摩擦齿轮202相连接。
58.如图19所示,将末端执行器安装在柔性机械臂10的末端,柔性机械臂10安装在工具卫星上。
59.如图18所示,当在轨卫星发生故障,需要拆卸掉卫星上的航天插头时,柔性机械臂运动使末端执行器靠近航天插头,升降电机6动作使执行器的内层套筒301伸出,抓手底座201随之伸出靠近航天插头,柔性机械臂动作带动末端执行器向航天插头移动,航天插头挤压左滚轮207和右滚轮208,左抓手205和右抓手206同时向内转动一定角度,从而使航天插头9进入左抓手205、右抓手206、摩擦齿轮202三者之间的空间中,也就是航天插头9进入抓手机构2的内部。当航天插头进入到抓手机构的内部,左滚轮207和右滚轮208不再受航天插头的挤压,在左记忆合金弹簧203和右记忆合金弹簧204的弹力下,左抓手205和右抓手206恢复到初始位置。然后,抓手电机8工作带动摩擦齿轮202旋转,抓手机构2内部的摩擦齿轮202与航天插头9外表面的轮齿相互接触、摩擦,进而将航天插头9拆卸掉。
60.航天插头9拆卸掉被拆卸掉后,柔性机械臂10动作将航天插头转移到指定位置。
61.末端执行器还能够给卫星安装航天插头,事先将新的航天插头放入左抓手205、右抓手206、摩擦齿轮202三者之间的空间,柔性机械臂动作带动航天插头对准卫星上的插头接口,然后抓手电机8工作带动摩擦齿轮202旋转进而将航天插头安装到卫星上的插头接口中,下一步柔性机械臂带动末端执行器移动,安装好的航天插头挤压左滚轮207和右滚轮208,左抓手205和右抓手206同时向外转动一定角度,航天插头从左滚轮207和右滚轮208之间通过,此时末端执行器就可以撤离。
62.以上示意性的对本发明及其实施方式进行了描述,该描述没有限制性,附图中所示的也只是本发明的实施方式之一,实际的结构并不局限于此。所以,如果本领域的技术人
员受其启示,在不脱离本发明创造构思、精神的情况下,采用其它形式的零件构型、驱动装置以及连接方式不经创造性的设计与该技术方案相似的结构方式及实施例,均应属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1