一种抛索型空间柔性电磁对接机构
1.本发明涉及一种航天器对接机构,特别涉及可实现锁紧/解锁的空间电磁对接机构。适用于进行姿态调整后实现追踪航天器与目标航天器之间的近距离电磁对接。
背景技术:
2.传统航天器对接采用推力器来实现,有消耗推进剂、产生羽流污染以及燃烧产物余热干扰光学测量等诸多不足之处,使其对接效率较低,空间电磁对接通过安装在相邻两航天器上的电磁线圈产生引力来实现对接,利用电磁力和电磁力矩实现在空间轨道上相对距离的缩短和姿态调整。空间电磁对接技术是一种柔性对接技术,可以避免上述不足之处,具有更好的柔性对接控制性能,提升航天器在轨寿命与作业效率。
3.近年来出现诸多空间对接机构,但锁紧机构的活动机械爪机构还未被提出。该锁紧机构能提高机构的锁紧能力,解锁也比较方便,有较高的自由度,避免在对接完成后出现对接部位松动易位的情况。例如欧洲帕多瓦大学提出的拉索式电磁对接feld系统,分为发射拉索、软对接、回收拉索和硬对接四个阶段,未能实现两航天器最终柔性对接。已存在的相关研究没有过度关注锁紧机构,相关对接锁紧机构比较简单,导致性能不足,且并没有能做到空间对接,尤其是不能实现空间柔性电磁对接。
技术实现要素:
4.本发明解决的技术问题为:克服现有机构对接技术存在燃料消耗、羽流污染、热排放、冲击力大、对接末端无控制等不足,提供一种抛索型空间柔性电磁对接机构设计方案,通过接触、连续、可逆以及同步控制的接触式柔性对接系统,实现两个航天器的柔性电磁对接与分离。
5.本发明采取的技术方案为:抛索型空间柔性电磁对接机构,包括:主动机构基座、被动机构基座、主动机构吸附电磁线圈座、被动机构吸附电磁线圈座、电机、卷扬机、限位滑轮、牵引绳、导引球、舵机、三指夹钳式机械爪、三轴陀螺仪和三轴加速度计、激光测距传感器、磁力矩器和飞轮;
6.主动机构基座上具有限位槽、限位滑轮和牵引绳孔;
7.被动机构基座一端设有机械爪滑槽和被动机构吸附电磁线圈座;
8.主动机构吸附电磁线圈座一端,牵引绳穿过牵引绳孔连接导引球,另一端即导引球所在的一端,主动机构发射线圈螺旋缠绕于主动机构吸附电磁线圈座上;
9.卷扬机支架内部固定卷扬机,用于对柔性牵引绳的卷扬,卷扬机支架中心具有轴承,用于
10.电机支架安装于卷扬机一侧,一端通过轴承与卷扬机支架相连,另一端固定电机;
11.导引球一端与牵引绳相连,主动机构吸附电磁线圈座一端设置的凹槽能够配合安装,起到固定并吸附导引球的作用;
12.舵机安装于主动机构电磁线圈外上下两侧,用于控制三指夹钳式机械爪的运动;
13.三指夹钳式机械爪固定于主动机构吸附电磁线圈座外侧,由舵机控制三指夹钳式机械爪的运动,机械爪分为前后两部分,中间由螺丝固定衔接,机械爪前端沿线向均匀设有多个小半球,数量与机械爪滑槽内部的半球状凹槽相同,且位置对应;
14.被动机构吸附电磁线圈座安装于被动机构基座一端,一侧设置半球状凹槽与引导球相匹;当三指夹钳式机械爪释放导引球,被动机构吸附电磁线圈座捕获导引球完成航天器对接;
15.限位滑轮固定于主动机构基座内,用于改变牵引绳伸展方向并保持牵引绳位于机构中轴线上;
16.主动机构基座靠近对接面一侧中心具有牵引绳孔,并安装有三轴陀螺仪和三轴加速度计,三轴陀螺仪和三轴加速度计用于测量三轴加速度以及三轴角度,为控制系统捕获航天器姿态信息;
17.磁力矩器与飞轮安装于主动机构对接面,可以产生电磁力矩,为航天器姿态调整提供动力;
18.激光测距传感器安装于主动对接机构前端面上下两侧与被动对接机构上侧,通过激光测量两航天器相对位置与距离,为控制系统捕获信息;
19.牵引绳一端缠绕于卷扬机上,另一端固定于导引球上;姿态调整完成后,电机控制卷扬机释放牵引绳并通过限位滑轮保持牵引绳位于机构中轴线上,舵机控制三指夹钳式机械爪张开一定角度,主动吸附电磁线圈通电产生与主动机构发射线圈相斥的电磁力释放导引球,导引球在牵引绳的连接下弹出主动机构吸附电磁线圈座,并被被动机构吸附电磁线圈座捕获,导引对接完成;
20.电机在被动机构吸附电磁线圈座捕获导引头之后,控制卷扬机回收牵引绳,主动机构发射线圈通电缓慢产生与被动机构吸附电磁线圈座相互吸引的电磁力,使得两航天器对接面缓慢接近并贴合,完成柔性对接;
21.三指夹钳式机械爪由舵机控制,在两航天器完成柔性对接之后,舵机控制三指夹钳式机械爪下放,使得机械爪前端半球状突起与机械爪滑槽处凹槽对接并锁紧;
22.本发明能有效克服传统推力器对接方式的燃料消耗、羽流污染、热排放、冲击力大、对接末端无控制等问题,有着不消耗燃料、无对接冲击、能有效避免羽流对光学元件的污染等优势,显著降低对接系统的复杂度,同时可降低对航天器姿态轨道控制精度的要求,适应椭圆轨道航天器不同姿态实现在轨连接,可应用于微小卫星在轨重构与在轨组装。本发明机构锁紧系统灵活,采用机械爪锁紧机构增加了容错性,并使机构能够适应多种对接情况。
附图说明
23.为了更清楚地说明本发明的技术方案,下面将对所展示的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一种优选方案。
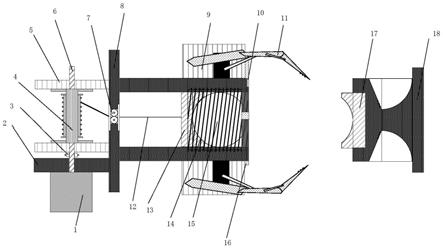
24.图1是非对接期间主动机构示意图。
25.图2是准备对接开始阶段机构示意图。
26.图3是对接完成并锁紧后机构示意图。
27.图4是机构组成图。
28.图5是对接流程图。
29.图中1.电机,2.电机架,3.联轴器,4.卷扬机,5.卷扬机支架,6.转轴,7.限位滑轮,8.主动机构基座,9.舵机与飞轮,10.激光测距传感器,11.三指夹钳式机械爪,12.抛索,13.主动机构吸附电磁线圈座,14.发射线圈,15.导引球,16.磁力矩器,17.被动机构吸附电磁线圈座,18.被动机构基座。
具体实施方式
30.以下将结合附图,对本发明的优选实施例进行详细的描述:应当理解,优选实施例仅为了说明本发明,而不是为了限制本发明的保护范围。
31.面向两个航天器开展空间对接任务,本发明为一种抛索型空间柔性电磁对接机构,利用电磁力/电磁力矩与绳索拉力作为控制力,通过电机实现两个航天器的相互靠近,通过姿态控制系统实现两个航天器相对姿态的调节,结合机械结构实现导向对接与锁紧的对接全过程。同样的,将本发明通过上述逆过程,可以实现两个航天器姿态的可控电磁分离。
32.本发明的对接机构,分为主动机构与被动机构,主动对接机构安装在追踪航天器上,被动机构安装在目标航天器上。主动机构包括:牵引机构、发射机构、锁紧机构、导引球、姿态调节机构、激光测距传感器;被动机构包括:吸附电磁线圈座、被动机构电磁线圈、机械爪滑槽、激光测距传感器、磁力矩器、飞轮、基座。
33.主动机构牵引机构包括:电机、电机支架、卷扬机支架、卷扬机、限位滑轮、基座、联轴器、轴承座、转轴、轴承、轴套、滚筒、牵引绳、牵引绳孔,用于回收导引球,提供使两航天器相对距离缩小的轴向力。电机安置于电机支架外部,通过转轴与卷扬机相连,卷扬机轴与电机支架、卷扬机支架之间有轴承减少摩擦;牵引绳缠绕在卷扬机上,穿过牵引绳孔与限位滑轮与导引球相连;卷扬机工作时回收牵引绳,提供使两个航天器相互接近的轴向力。
34.主动机构发射机构包括:主动机构吸附电磁线圈座、外壳、主动机构发射线圈,利用电磁弹射牵引球并且提供电磁力/电磁力矩,控制两个航天器相对距离与姿态。发射线圈缠绕于吸附电磁线圈座外侧,在未抛射导引球时,吸附电磁线圈座吸附导引球。主动机构电磁线圈座外部为圆柱面,内部被加工为可以与导引球相贴合的曲目,电磁线圈座与缠绕其外侧的线圈安置于发射筒内。抛射导引球时,发射线圈产生与导引球内电磁线圈产生的磁场反向的磁场,将导引球弹出;在分离时,发射线圈产生吸引导引球的电磁力,将导引球回收入主动机构中。
35.锁紧机构包括:舵机、三指夹钳式机械爪,用于在抛射前限位导引头和在对接完成后主被动机构间锁紧限位,实现两个航天器的机械连接。舵机与三指夹钳式机械爪相连,机械爪由舵机带动,实现打开与关闭,收紧时可以限制导引球和与被动机构机械爪滑槽锁紧,张开时可释放导引球和与被动机构分离。
36.导引球用于与被动机构电磁线圈间产生电磁力/电磁力矩作用,使导引头被捕获。内有电磁线圈,其余部分为不导磁的非磁体材料。导引球内的电磁线圈材料要求矫顽力较大,难以被外界磁场影响。导引球在对接时与被动机构吸附电磁线圈座吸附锁紧,分离时被电磁线圈座弹开。
37.姿态调节机构包括:磁力矩器、飞轮、三轴陀螺仪和三轴加速度计,用于测量两个
航天器三轴加速度与三轴姿态角度并产生电磁力矩为姿态调整提供动力。磁力矩器与飞轮安装于主动机构周围三个对角,为航天器姿态调整提供动力;三轴陀螺仪和三轴加速度计,安装于主动机构基座上,位于发射筒内,用于测量三轴加速度和三轴角度,为控制器提供姿态信息。
38.被动机构包括:吸附电磁线圈座、被动机构电磁线圈,对接时吸附电磁线圈座与被动机构电磁线圈产生与导引头相互吸引的电磁力,接触后锁紧,分离时产生排斥导引头的电磁力实现分离;机械爪滑槽内测有一系列凹槽,与机械爪上的突起相匹配,用于与三指夹钳式机械爪锁紧;激光测距传感器、磁力矩器、飞轮,用于与主动机构姿态调节机构配合调节两航天器姿态。
39.本发明的对接优选方案为:当两个航天器在轨靠近至捕获域,主动机构吸附电磁线圈工作,将球吸附在发射槽内,主动机构三指夹钳机械爪打开,根据激光测距传感器与三轴陀螺仪和三轴加速度计所获得的两个航天器的相对位置、姿态、加速度等传感信息,当姿态不满足对接条件时,通过磁力矩器与飞轮产生力矩调整追踪航天器姿态,当满足对接条件时,主动机构通过发射线圈通电和吸附电磁线圈断电,产生与导引球电磁线圈产生的磁场相反的磁场,将导引球从主动机构吸附电磁线圈座弹出。被动机构电磁线圈通电,产生吸引导引球的电磁力。导引球弹出后在电磁力的作用下飞向被动机构,与被动机构吸附电磁线圈座接触后锁紧。导引球被被动机构捕获后,在电机的带动下卷扬机工作回收牵引绳,产生使两航天器相互靠近的牵引力。在两航天器达到一定相对速度与距离后,主动机构吸附电磁线圈座和发射线圈与被动机构吸附电磁线圈座和电磁线圈产生电磁斥力,电磁斥力大小大于卷扬机产生的牵引力,使两个航天器相对速度减小。最终,在控制器的控制下,两个航天器对接时相对速度为零。对接后,机械爪在舵机作用下收拢,机械爪嵌入机械爪滑槽锁紧,实现两个航天器的对接。
40.本发明的分离优选方案为:当两个航天器要解除对接状态时,在舵机的带动下,三指夹钳式机械爪与机械爪滑槽分离,两个航天器解锁。被动机构电磁线圈产生与导引球电磁线圈产生的磁场反向的磁场,主动机构电磁线圈产生与导引球电磁线圈产生的磁场同向的磁场,导引球与被动机构吸附电磁基座分离,吸附于主动机构电磁基座,两个航天器解除机械连接。同时,主动机构电磁线圈与被动机构电磁线圈产生的磁场方向相反,两个航天器受到电磁斥力相互远离,两个航天器实现分离。
41.本发明还可有其它多种实施例,在不背离本发明精神及其实质的情况下,本领域技术人员当可根据本发明作出各种相应的改变和变形,但这些相应的改变和变形都应属于本发明所附的权利要求的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1