一种复合推力构型直升机/发动机综合控制系统及方法与流程
1.本发明属于直升机领域,特别涉及一种复合推力构型直升机/发动机综合控制系统及方法。
背景技术:
2.常规构型直升机的主要功率负载来自旋翼。尾桨作为旋翼反扭矩平衡装置,其功率提取较小且与旋翼负载呈一定比例关系。再加上常规直升机普遍采用恒定的旋翼转速,因而常规直升机功率负载模型较为简单,一般采用典型飞行状态下的旋翼负载需求作为设计点,建立总距-功率负载关系。飞行员操纵总距杆改变旋翼桨距,实现直升机负载调节;发动机根据总距位置和预设的总距-功率负载关系调节燃油流量,实现与直升机的功率负载匹配。由于直升机实际使用状态和环境多变,因此,基于单一设计点进行发动机控制的方法存在一定局限性。现代涡轴发动机全权限数字式电子控制系统虽然可以通过闭环实现直升机稳态飞行情况下全包线范围内的旋翼恒转速控制,但直升机机动过程中的动态响应优劣,很大程度上取决于直升机总距-功率负载关系的准确性。
技术实现要素:
3.本技术提供一种复合推力构型直升机/发动机综合控制系统及方法,能够使发动机快速准确地响应直升机的负载变化。
4.第一方面,本技术提供一种复合推力构型直升机/发动机综合控制系统,所述综合控制系统包括飞控计算机(1)、大气数据计算机(2)、发动机电子控制器(3)、旋翼舵机(5)和推力桨舵机(6),其中:
5.飞控计算机(1)分别与大气数据计算机(2)、发动机电子控制器(3)、旋翼舵机(5)和推力桨舵机(6)通过数据总线连接,实现数据实时通讯;发动机电子控制器(3)与发动机连接,旋翼舵机(5)与主旋翼连接,推力桨舵机(6)与推力桨连接;
6.所述飞控计算机(1)用于根据操纵指令计算并输出直升机操纵量;根据直升机飞行状态和环境参数计算旋翼/推力桨的目标转速rnp;内设功率负载预测模型,用于发动机功率负载p
req
的计算;
7.所述大气数据计算机(2)用于采集和处理直升机环境参数,包括飞行速度v、大气压力p和大气温度t;
8.所述发动机电子控制器(3)用于计算发动机燃油流量调节发动机功率。
9.具体的,所述直升机操纵量包括旋翼桨距clp、推力桨距cla;
10.通过所述旋翼操纵舵机5控制旋翼桨距clp;
11.通过所述推力桨操纵舵机6控制推力桨距cla。
12.第二方面,本技术提供一种复合推力构型直升机/发动机综合控制方法,所述方法包括:
13.采集直升机的大气压力p、大气温度t、前飞速度v和旋翼桨距clp、根据前飞速度v
确定旋翼/推力桨的目标转速rnp;
14.根据直升机旋翼负载特性,得到大气压力p、大气温度t、前飞速度v、旋翼桨距clp、目标转速rnp与旋翼需用功率p1的对应关系:p1=f1(clp,rnp,v)
·
g1(p,t);
15.根据直升机推力桨负载特性,得到大气压力p、大气温度t、前飞速度v、推力桨距cla、目标转速rnp与旋翼推力桨需用功率p2的对应关系:p2=f2(cla,rnp,v)
·
g2(p,t);
16.根据传动系统及相关附件工作特性,可以得到传动附件功率损失p3;
17.根据公式p
req
=p1+p2+p3,计算发动机功率负载p
req
。
18.具体的,方法还包括:
19.根据所述发动机功率负载p
req
,利用发动机综合控制规律,对发动机进行功率控制。
20.具体的,p1=f1(clp,rnp,v)
·
g1(p,t),实际应用中f1和g1可以采用仿真或者试验拟合的方式确定,图5给出了某一前飞速度v下的典型的f1模型关系,其中不同目标转速rnp和前飞速度v之间可以通过线性插值计算得到。
21.具体的,p2=f2(cla,rnp,v)
·
g2(p,t),实际应用中f2和g2可以采用仿真或者试验拟合的方式确定,图5给出了某一前飞速度v下的典型的f2模型关系,其中不同目标转速rnp和前飞速度v之间可以通过线性插值计算得到。
22.具体的,实际应用中p3可以简化为一个常数,例如80kw。
23.具体的,直升机旋翼负载特性包括旋翼翼型以及与翼型相关的模型参数。
24.直升机推力桨负载特性包括推力桨翼型以及与翼型相关的模型参数。
25.综上所述,本技术提供一种复合推力构型直升机/发动机综合控制方法,根据直升机飞行指令、飞行状态和环境参数实时预测发动机功率负载,为发动机平稳快速响应提供控制依据。经试验验证,以某复合推力构型直升机为例,上述模型得到的发动机功率负载预测值与实际值误差<10%。采用上述直升机/发动机综合控制技术的某复合推力构型直升机,可以在全飞行包线范围内有保证旋翼转速与目标转速rnp的满意跟随,暂态误差<4%,稳态误差<0.5%。
附图说明
26.图1为本技术提供的一种共轴双旋翼/推力桨复合推力构型直升机的结构示意图;
27.图2为本技术提供的一种直升机/发动机综合控制系统的结构示意图;
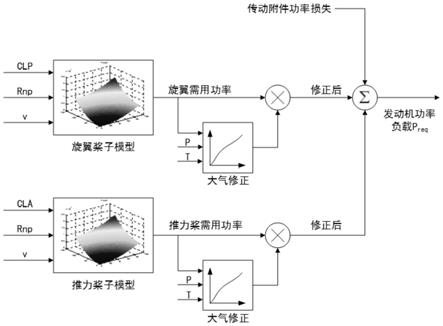
28.图3为本技术提供的一种发动机功率负载预测模型的示意图;
29.图4为本技术提供的一种发动机综合控制规律的示意图;
30.图5为本技术提供的一种典型旋翼桨距/推力桨距-需用功率关系。
具体实施方式
31.如图1所示,为本技术提供的一种共轴双旋翼/推力桨复合推力构型直升机示意图。所述复合推力构型直升机的主要特点是采用共轴刚性旋翼和推力桨构型,该复合构型直升机低速状态(包括悬停)下与常规直升机类似,发动机通过主减速器驱动旋翼向直升机提供飞行动力;而高速状态下一方面通过降低发动机输出转速,避免高速飞行时旋翼桨尖激波。另一方面,将绝大多数发动机功率通过传动系统分配给推力桨,从而实现比常规直升
机更快的飞行速度。在不同飞行模式和状态下,所述复合推力构型直升机的旋翼负载和推力桨负载均有较大的变化范围,且两者之间无特定对应规律。同时,为了满足旋翼气动需求,旋翼及推力桨的转速需根据飞行状态进行实时大范围调节。因此,与常规构型直升机相比,复合推力构型直升机的功率负载特性及控制更为复杂。
32.要实现上述构型直升机在各种飞行状态下的操纵稳定性和机动性,使发动机能够快速准确地响应直升机的负载变化,就必须要求发动机控制与直升机飞行状态、环境参数等多变量相结合,进行直升机/发动机综合控制。
33.实施例一
34.如图1-2所示,本技术提供一种复合推力构型直升机/发动机综合控制系统。所述系统主要包括飞控计算机(1)、大气数据计算机(2)、发动机电子控制器(3)、旋翼舵机(5)和推力桨舵机(6),其中:
35.所述飞控计算机(1)用于根据飞行员操纵指令计算并输出直升机操纵量,包括旋翼桨距clp、推力桨距cla,通过所述旋翼舵机(5)控制旋翼桨距clp,通过所述推力桨舵机(6)控制推力桨距cla;另一方面,飞控计算机(1)根据直升机飞行状态和环境参数计算旋翼/推力桨的目标转速rnp;除此之外,所述飞控计算机(1)内设功率负载预测模型,用于发动机功率负载p
req
的计算。
36.所述大气数据计算机(2)用于采集和处理直升机环境参数,包括飞行速度v、大气压力p和大气温度t。
37.所述发动机电子控制器(3)用于计算发动机燃油流量调节发动机功率,实现直升机稳定飞行和机动过程中发动机输出功率与发动机功率负载p
req
相匹配,从而保证旋翼/推力桨转速与目标转速rnp值一致。
38.所述飞控计算机(1)、大气计算机(2)、发动机电子控制器(3)三者之间通过数据总线连接,实现数据实时通讯。一方面,所述飞控计算机(1)接收来自飞行员的飞行操纵指令、来自大气数据计算机(2)的环境参数和来自发动机控制器(3)的发动机参数;另一方面,所述飞控计算机(1)将旋翼/推力桨的目标转速rnp和发动机功率负载p
req
信息传输给发动机电子控制器(3)。
39.可见,本技术提供一种复合推力构型直升机/发动机综合控制系统,其主要技术特点是以直升机飞控计算机为中心。一方面,在按飞行员指令进行直升机操纵的同时,根据直升机前飞速度实时计算最优旋翼/推力桨的目标转速rnp;另一方面结合直升机操纵指令、飞行状态、环境参数等建立功率负载预测模型,计算得出发动机功率负载p
req
,作为发动机功率控制的给定量,直接参与发动机燃油调节,实现发动机功率的快速准确响应。
40.实施例二
41.本技术提供一种复合推力构型直升机/发动机综合控制方法,所述方法应用于上述实施例的复合推力构型直升机/发动机综合控制系统,方法包括:
42.步骤1:采集直升机的大气压力p、大气温度t、前飞速度v和旋翼桨距clp、根据前飞速度v确定旋翼/推力桨的目标转速rnp;
43.通过大气数据计算机(2)采集上述参数
44.根据前飞速度v确定旋翼/推力桨的目标转速rnp,其中,rnp随着直升机前飞速度v的增加而减小,以保证旋翼和推力桨桨尖马赫数不超限。
45.步骤2:根据直升机旋翼负载特性,得到大气压力p、大气温度t、前飞速度v、旋翼桨距clp、目标转速rnp与旋翼需用功率p1的对应关系:p1=f1(clp,rnp,v)
·
g1(p,t);
46.实际应用中,大气压力p和大气温度t对功率也有影响,因此,需要利用大气压力p和大气温度t对上述p1进行修正,得到修正后的旋翼需用功率。
47.例如,实际应用中f1和g1可以采用仿真或者试验拟合的方式确定典型飞行状态下和典型环境下的旋翼桨距-需用功率关系,如表1、表2。通过查表和差值的方式确定p1。图5给出了某一前飞速度v和环境条件下的f1模型关系,其中不同目标转速rnp和前飞速度v之间可以通过线性插值计算得到。
48.其中,直升机旋翼负载特性包括旋翼翼型以及与翼型相关的模型参数。
49.表1
[0050][0051][0052]
表2
[0053][0054]
步骤3:根据直升机推力桨负载特性,得到大气压力p、大气温度t、前飞速度v、推力桨距cla、目标转速rnp与旋翼推力桨需用功率p2的对应关系:p2=f2(cla,rnp,v)
·
g2(p,t);
[0055]
实际应用中,大气压力p和大气温度t对推力桨需用功率也有影响,因此,需要利用大气压力p和大气温度t对上述推力桨需用功率p2进行修正,得到修正后的旋翼需用功率。
[0056]
例如,实际应用中f2和g2可以采用仿真或者试验拟合的方式确定典型飞行状态下和典型环境下的推力桨距-需用功率关系,如表3、表4。通过查表和差值的方式确定p2。
[0057]
其中,直升机推力桨负载特性包括推力桨翼型以及与翼型相关的模型参数。
[0058]
表3
[0059][0060]
表4
[0061]
[0062][0063]
步骤4:根据传动系统及相关附件工作特性,可以得到传动附件功率损失p3;
[0064]
其中,传动系统及相关附件工作特性包括传动效率、传动比和附件功率提取等。
[0065]
实际应用中p3可以简化为一个常数,例如80kw。
[0066]
步骤5:根据公式p
req
=p1+p2+p3,计算发动机功率负载p
req
。
[0067]
步骤6:根据所述发动机功率负载p
req
,利用发动机综合控制规律,对发动机进行功率控制。
[0068]
如图4所示,所述发动机综合控制规律的控制结构见图4,其主要技术特点是将旋翼/推力桨目标转速rnp作为发动机闭环控制的给定量,与发动机输出转速np进行实时比较,偏差信号作为控制输入参与燃油调节;另一方面,将功率负载预测模型计算得到的直升机需用功率p
req
作为发动机燃油控制回路中的前馈环节输入,形成发动机综合控制规律。
[0069]
实际应用中,如图3所示,为了实现上述复合推力构型直升机/发动机综合控制方法,可以采用适用于复合推力构型直升机的发动机负载预测模型。所述模型的输入包括旋翼/推力桨的目标转速rnp、旋翼桨距clp、推力桨距cla、飞行速度v、大气压力p、大气温度t;模型输出为发动机功率负载p
req
,即直升机功率需求。
[0070]
所述模型将发动机功率负载由旋翼需用功率、推力桨需用功率以及传动附件功率损失三部分进行合成。
[0071]
所述模型中,包含旋翼需用功率子模型和推力桨需用功率子模型,两个子模型分别根据旋翼理论计算和推力桨理论计算获得,并经试验数据修正。工作状态下,首先两个子模型分别根据旋翼桨距clp和推力桨桨距cla、目标转速rnp以及飞行速度v,通过模型求解得到旋翼、推力桨在标准大气状态下的需用功率;进一步地,根据直升机环境数据和标准大气模型加以修正,得到直升机当前环境状态下的旋翼、推力桨需用功率;而传动附件功率提取可以简化为rnp和t的函数,由rnp计算直接计算得到。
[0072]
本发明的优点:
[0073]
a)本发明提供一种适用于复合构型直升机/发动机综合控制系统,可以实现旋翼、推力桨在不同模式下与发动机的功率匹配,从而有效保证直升机操纵稳定性和机动性。
[0074]
b)提供的发动机负载预测模型将直升机操纵、飞行状态和环境等多变量作为输入,通过模型计算实时得出直升机需求功率,更加真实有效的反应直升机的功率需求,具有较高的准确性和实时性。
[0075]
综上所述,本技术提供了一种复合推力构型直升机/发动机综合控制方法,满足所述直升机在各飞行状态下的发动机功率负载控制需求,使发动机响应更加快速准确。本发明提供的直升机/发动机综合控制技术中包含一种针对复合推力构型直升机的功率负载预测模型,可以实现复合推力构型直升机发动机功率负载的实时预测。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1