飞行器用推进系统的制作方法
1.本发明涉及飞行器用推进系统。
背景技术:
2.以往,已知在飞行器主体安装有多个发动机、且在发动机连接有发电机的飞行器用推进系统(例如专利文献1(美国专利第8727271号说明书)及专利文献2(美国专利第9493245号说明书))。该飞行器用推进系统将发电机供给的电力及/或蓄电池供给的电力向电动机供给,电动机对多个旋翼进行驱动。
技术实现要素:
3.发明要解决的课题
4.在这种飞行器用推进系统中,从发电效率的观点出发,考虑根据情况的不同(例如,在电力负荷小的巡航行进时等),使发电机的一部分停止。
5.然而,在该情况下,当使发动机长期间持续停止时,发动机的工作所需的工作流体(例如润滑油)有可能冻结。其结果是,在使已停止的发动机再启动时,存在启动时间变长这样的课题。需要说明的是,发动机的再启动例如在运行了的发动机发生了故障时、电力负荷高的降落时等,是必要的。
6.本发明是考虑这样的情况而完成的,其目的之一在于提供能够提高发动机的再启动性的飞行器用推进系统。
7.用于解决课题的方案
8.本发明的飞行器用推进系统具有以下的结构。
9.(1)本发明的一方案的飞行器用推进系统具备:多个发动机,它们安装于飞行器的机体;发电机,其与所述发动机的发动机轴连接;多个电动机,它们由包含所述发电机所发出的电力在内的电力驱动;多个旋翼,它们安装于所述飞行器的机体,且由所述电动机所输出的驱动力进行驱动;以及控制部,其控制所述多个发动机的运行状态,所述控制部在所述飞行器的飞行状态为所述多个发动机运行而所述飞行器起飞之后的第一状态的情况下,在使所述多个发动机中的一部分发动机运行的同时,使剩余的发动机停止,其中,所述多个发动机分别具备供工作流体循环的循环机构,所述飞行器用推进系统具备将所述多个发动机中的第一发动机中的所述循环机构与所述多个发动机中的第二发动机中的所述循环机构连通的多个连通管。
10.(2)在上述(1)的方案的飞行器用推进系统的基础上,也可以是,在所述循环机构设置有使所述工作流体在所述循环机构循环的流体压力泵,所述多个连通管具备第一连通管及第二连通管,所述第一连通管将所述第一发动机中的所述循环机构中的位于所述流体压力泵的下游侧的部分与所述第二发动机中的所述循环机构中的位于所述流体压力泵的上游侧的部分连通,所述第二连通管将所述第一发动机中的所述循环机构中的位于所述流体压力泵的上游侧的部分与所述第二发动机中的所述循环机构中的位于所述流体压力泵
的下游侧的部分连通。
11.(3)在上述(1)或(2)的方案的飞行器用推进系统的基础上,也可以是,在所述多个连通管分别设置有阀。
12.(4)在上述(3)的方案的飞行器用推进系统的基础上,也可以是,所述控制部在所述飞行器的飞行状态为所述第一状态的情况下,使所述阀开阀,在其他情况下,使所述阀闭阀。
13.(5)在上述(1)至(4)中任一方案的飞行器用推进系统的基础上,也可以是,所述控制部在所述飞行器的飞行状态为所述第一状态的情况下,使所述第一发动机和所述第二发动机交替运行。
14.(6)在上述(5)的方案的飞行器用推进系统的基础上,也可以是,在所述循环机构设置有取得在所述循环机构循环的所述工作流体的温度及压力中的至少1个的流体用传感器,所述控制部基于所述流体用传感器的取得结果,来在所述第一发动机的运行与所述第二发动机的运行之间切换。
15.(7)在上述(1)至(6)中任一方案的飞行器用推进系统的基础上,也可以是,所述飞行器用推进系统还具备取得与所述飞行器的飞行相关的飞行信息的取得部,所述控制部基于由所述取得部取得的所述飞行信息来控制所述多个发动机的运行状态。
16.(8)在上述(1)至(7)中任一方案的飞行器用推进系统的基础上,也可以是,所述第一状态是所述飞行器在到达规定的高度之后沿着包含水平方向的方向移动着的状态。
17.(9)在上述(1)至(8)中任一方案的飞行器用推进系统的基础上,也可以是,所述控制部在所述飞行器的飞行状态是与第一状态不同的第二状态的情况下,使所述多个发动机运行而控制所述飞行器。
18.(10)在上述(1)至(9)中任一方案的飞行器用推进系统的基础上,也可以是,所述工作流体是向支承所述发动机轴的轴承供给的润滑油。
19.在本发明中,多个发动机分别具备循环机构。在运行中的发动机中,使工作流体在循环机构循环,由此能够将工作流体维持为高温。多个连通管将第一发动机的循环机构(以下称作第一循环机构)与第二发动机的循环机构(以下称作第二循环机构)连通。因此,能够使在第一循环机构循环的工作流体与在第二循环机构循环的工作流体经由多个连通管而循环。例如,能够使工作流体经由多个连通管中的第一连通管而从第一循环机构向第二循环机构流动,使工作流体从第二循环机构经由多个连通管中的第二连通管而向第一循环机构流动。
20.因而,例如在第一发动机运行的同时第二发动机停止时等,能够将较高温度的在第一循环机构循环的工作流体向第二循环机构供给,使该工作流体在第二循环机构循环。由此,即便第二发动机停止,也能够提高在第二循环机构循环的工作流体的温度。其结果是,能够抑制第二发动机中的工作流体的冻结,能够提高发动机的再启动性。
21.发明效果
22.根据(1)至(10)的方案,能够提高发动机的再启动性。
附图说明
23.图1是简要地表示搭载有飞行器用推进系统的飞行体1的图。
24.图2是表示飞行体1的功能结构的一例的图。
25.图3是用于说明飞行体1的飞行状态的图。
26.图4是表示gt60-1、60-2的功能结构的一例的图。
27.图5是表示gt60-1、60-2的功能结构的另一例的图。
28.附图标记说明:
29.1 飞行体(飞行器)
30.10 机体
31.12 旋翼
32.14 电动机
33.50 发电机
34.60 gt(发动机)
35.63 发动机轴
36.65 循环机构
37.65a 流体用传感器
38.66 流体压力泵
39.68 第一连通管
40.68a、69a 阀
41.69 第二连通管
42.100 控制装置(控制部)
43.120 各种传感器(取得部)。
具体实施方式
44.以下,参照附图来说明本发明的飞行器用推进系统的实施方式。
45.[整体结构]
[0046]
图1是简要地表示搭载有飞行器用推进系统的飞行体1(权利要求的飞行器)的图。飞行体1例如具备机体10、多个旋翼12a~12d、多个电动机14a~14d、臂16a~16d。以下,在不对多个旋翼12a~12d彼此进行区别的情况下,称作旋翼12,在不对多个电动机14a~14d彼此进行区别的情况下,称作电动机14。飞行体1可以是有人飞行体,也可以是无人飞行体。飞行体1不限于图示的多旋翼机(multicopter),也可以是直升机(helicopter)、具备旋转翼和固定翼这两方的混合型飞行体。
[0047]
旋翼12a经由臂16a而安装于机体10。在旋翼12a的基部(旋转轴),安装有电动机14a。电动机14a驱动旋翼12a。电动机14a例如是无刷dc马达。旋翼12a是在飞行体1为水平姿势的情况下,绕与重力方向平行的轴线旋转的叶片的固定翼。关于旋翼12b~12d、臂16b~16d及电动机14b~14d,也具有与上述同样的功能结构,因此省略说明。
[0048]
旋翼12根据控制信号而旋转,由此飞行体1以期望的飞行状态飞行。控制信号是基于操作者的操作或自动操纵中的指示得到的用于控制飞行体1的信号。例如,旋翼12a和旋翼12d沿着第一方向(例如顺时针方向)旋转,旋翼12b和旋翼12c沿着第二方向(例如逆时针方向)旋转,由此飞行体1飞行。除了上述的旋翼12以外,也可以还没置未图示的姿势保持用或水平推进用的辅助旋翼等。
[0049]
图2是表示飞行体1的功能结构的一例的图。飞行体1除了图1所示的结构以外,例如还具备第一控制电路20a、20b、20c、20d、蓄电池单元30、第二控制电路40-1、40-2、发电机50-1、50-2、燃气轮机发动机(以下称作“gt”)60-1、60-2。赋予了附图标记及连字符之后的数字“1”的结构是与旋翼12a、旋翼12d、电动机14a、电动机14d、第一控制电路20a及第一控制电路20d对应的第一结构。赋予了附图标记及连字符之后的数字“2”的结构是与旋翼12b、旋翼12c、电动机14b、电动机14c、第一控制电路20b及第一控制电路20c对应的第二结构。以下,作为代表而说明第一结构,第二结构为与第一结构同样的结构,因此省略说明。
[0050]
第一控制电路20a是包括逆变器等驱动电路在内的pdu(power drive unit)。第一控制电路20a向电动机14a供给电力,该电力是指将由蓄电池单元30供给的电力通过开关等进行变换得到的电力。第一控制电路20d与第一控制电路20a同样地是pdu,将由蓄电池单元30供给的电力向电动机14d供给。电动机14a驱动旋翼12a,电动机14d驱动旋翼12d。
[0051]
蓄电池单元30例如具备蓄电池32、bmu(battery management unit)34、检测部36。蓄电池32例如是将多个电池单体串联、并联、或串并联连接的电池组。构成蓄电池32的电池单体例如是锂离子电池(lithium-ion battery:lib)、镍氢电池等能够反复进行充电和放电的二次电池。
[0052]
bmu34进行电池单体平衡、蓄电池32的异常检测、蓄电池32的单体温度的导出、蓄电池32的充放电电流的导出、蓄电池32的soc的推定等。检测部36是用于测定蓄电池32的充电状态的电压传感器、电流传感器、温度传感器等。检测部36将测定出的电压、电流、温度等测定结果向bmu34输出。
[0053]
飞行体1也可以具备多个蓄电池单元30。例如,也可以设置与第一结构及第二结构分别对应的蓄电池单元30。需要说明的是,在本实施方式中,由发电机50生成的电力向蓄电池32供给,但不限定于此。由发电机50生成的电力也可以不经由蓄电池32而(或关于是否经由蓄电池32而选择性地)向第一控制电路20及电动机14供给。
[0054]
第二控制电路40-1是包含转换器等在内的pcu(power conditioning unit)。第二控制电路40-1将由发电机50-1发电得到的交流电力变换为直流电力,并将变换得到的电力向蓄电池32及/或第一控制电路20供给。
[0055]
发电机50-1与gt(权利要求的发动机)60-1的输出轴连接。发电机50-1通过gt60-1运行而被驱动,通过该驱动而生成交流电力。发电机50-1也可以经由减速机构而与gt60-1的输出轴连接。发电机50-1也可以作为马达发挥功能,在停止向gt60-1供给燃料的时,使gt60-1旋转(空转)而成为能够运行的状态。此时,第二控制电路40-1能够从蓄电池32侧取出电力而拖动(motoring)发电机50-1。也可以代替上述的功能结构,gt60-1的输出轴与后述的起动电动机64-1连接,起动电动机64-1使gt60-1为能够运行的状态。
[0056]
gt60-1例如是涡轮轴发动机。关于gt60-1的详细的结构,见后述。
[0057]
控制装置100(权利要求的控制部)例如通过cpu(central processing unit)等硬件处理器执行程序(软件)来实现。控制装置100的功能中的一部分或全部可以由lsi(large scale integration)、asic(application specific integrated circuit)、fpga(field-programmable gate array)、gpu(graphics processing unit)等硬件(包括电路部:circuitry)来实现,也可以通过软件与硬件的协同配合来实现。程序可以预先保存于控制装置100的hdd(hard disk drive)、闪存器等存储装置(具备非暂时性的存储介质的存储装
置),也可以保存于dvd、cd-rom等能够装卸的存储介质,并通过存储介质(非暂时性的存储介质)装配于驱动装置而安装于控制装置100的hdd、闪存器。
[0058]
各种传感器120(权利要求的取得部)例如包括转速传感器、多个温度传感器、多个压力传感器、润滑油传感器、高度传感器、陀螺仪传感器等。转速传感器检测涡轮的转速。温度传感器检测gt60的进气口附近的温度、燃烧室的下游附近的温度。润滑油传感器检测向gt60的轴承等供给的润滑油的温度。压力传感器检测收容控制装置100的容器的内部的压力、gt60的进气口附近的压力。高度传感器检测飞行体1的高度。陀螺仪传感器检测获知机体10的姿势。
[0059]
控制装置100对于上述的电动机14、第一控制电路20、蓄电池单元30、第二控制电路40、发电机50、gt60等,基于它们的运行状态或从各种传感器120取得的信息来进行控制。例如,控制装置100控制上述的各功能结构而使飞行体1起飞或降落、使飞行体1以规定的飞行状态飞行。
[0060]
控制装置100基于飞行信息来控制飞行体1。飞行信息例如是根据各种传感器120的检测结果而得到的信息、与控制信号相应的飞行体1的飞行状态。控制装置100在飞行体1的飞行状态是多个gt60运行而飞行体1起飞之后的第一状态的情况下,使多个gt60中的至少1个gt60停止,使未停止的其他gt60例如在其他gt60能够高效地运行的效率运行范围内运行而使与其他gt60对应的发电机50输出电力。控制装置100在飞行体1的飞行状态为与第一状态不同的第二状态的情况下,使多个gt60运行而控制飞行体1。
[0061]
图3是用于说明飞行体1的飞行状态的图。如图3所示,飞行体1进行如下动作:(1)进行滑行、(2)起飞、悬停(hovering)、(3)上升及加速、(4)巡航。然后,飞行体1进行如下动作:(5)下降及减速、(6)悬停、降落、(7)滑行、供油、驻机。飞行体1在到达规定的高度之后沿着包含水平方向在内的方向移动着的状态是第一状态。第一状态例如是图3所示的飞行体1巡航着的状态、或者图3所示的飞行体1进行着上升及加速、巡航、以及下降及减速的状态(3)-(5)。在以下的说明中,第一状态是飞行体1进行着上升及加速、巡航、以及下降及减速的状态。例如,飞行体1进行着起飞的动作或降落的动作的状态、以及进行着滑行、供油、驻机的状态(1)、(2)、(6)、(7)是第二状态。
[0062]
在上述的飞行状态中例如飞行体1进行着起飞、悬停、降落的情况(为第二状态的情况)下,控制装置100使gt60-1及gt60-2在效率运行范围内运行。通过gt60-1及gt60-2在效率运行范围内运行而输出的电力是飞行体1进行着起飞、悬停、或降落的状态的要求电力以上或与要求电力接近的电力。
[0063]
在上述的飞行状态中例如飞行体1进行着上升及加速、巡航、或下降及减速的情况(为第一状态的情况)下,控制装置100使gt60-1在效率运行范围内运行,并使gt60-2的运行停止。通过gt60-1在效率运行范围内运行而输出的电力是飞行体1进行着上升及加速、巡航、或下降及减速的状态的要求电力以上的电力或与之相近的电力。gt60-1及gt60-2例如是满足上述的条件那样的规格。
[0064]
要求电力是飞行体1为了转移到与控制信号相应的飞行状态、或为了维持飞行状态而所需的电力。控制装置100向电动机14提供要求电力,电动机14基于要求电力来驱动旋翼12,由此将飞行体1控制为与控制信号相应的飞行状态。在第一状态下要求的要求电力,例如是未停止的其他gt60在效率运行范围内运行而与其他gt60对应的发电机50能够输出
的电力以下的电力。在第一状态下要求的要求电力也可以是虽然超过上述的其他gt60能够输出的电力的电力,但为蓄电池32能够供给的电力以下的电力。换言之,虽然凭借实时发电的电力则会不足,但通过从预先蓄积于蓄电池32的电力填补电力,由此将要求电力以上的电力向电动机14供给。在第一状态下要求的要求电力在gt60-1及gt60-2的运行停止而未向蓄电池32供给电力的情况下,能够从蓄电池32供给。
[0065]
在如上述那样,在飞行体1的飞行状态为gt60-1及gt60-2运行而飞行体1起飞之后的第一状态的情况下,控制装置100例如在使gt60-1及gt60-2中的一部分的gt60-1运行的同时,使剩余的gt60-2停止。
[0066]
[燃气轮机发动机的详细情况]
[0067]
gt60-1例如具备未图示的进气口、压缩机、燃烧室、涡轮等。压缩机对从进气口吸入的吸入空气进行压缩。燃烧室配置于压缩机的下游,使压缩了的空气与燃料混合后的气体燃烧,生成燃烧气体。涡轮与压缩机连接,在燃烧气体的力的作用下与压缩机一体旋转。涡轮的输出轴通过上述的旋转而旋转,由此与涡轮的输出轴连接的发电机50运行。
[0068]
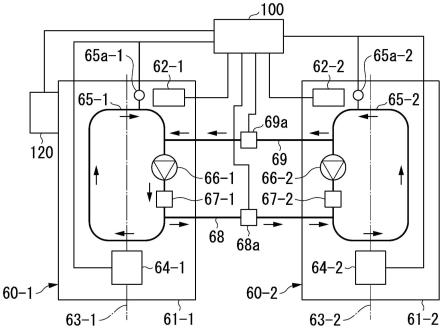
图4是表示gt60-1、60-2的功能结构的一例的图。图5是表示gt60-1、60-2的功能结构的另一例的图。
[0069]
gt60-1还具备壳体61-1、燃料切断阀62-1、发动机轴63-1、起动电动机64-1、循环机构65-1、流体压力泵66-1、喷出止回阀67-1。
[0070]
壳体61-1收容gt60-1的各结构。
[0071]
燃料切断阀62-1在向所述燃烧室供给的燃料的供给与切断之间切换。燃料切断阀62-1与控制装置100连接。燃料切断阀62-1由控制装置100控制。在燃料切断阀62-1为开状态的情况下,向燃烧室供给燃料而gt60-1运行。在燃料切断阀62-1为闭状态的情况下,向燃烧室进行的燃料的供给停止,gt60-1停止。
[0072]
发动机轴63-1将压缩机与涡轮连结。发动机轴63-1伴随涡轮的旋转而旋转。发动机轴63-1与发电机50-1(在图4中未图示)连接。发动机轴63-1的一部分(后述的低压系轴)作为所述输出轴发挥功能。通过发动机轴63-1旋转,由此发电机50运行。
[0073]
在本实施方式中,gt60-1是例如日本国特开2005-226584公开的所谓的双轴(twin spool)型发动机。
[0074]
作为本实施方式以外的例子,gt60-1也可以是所谓的单轴(singe spool)型发动机。在该情况下,发动机轴63-1不具备前述的低压系轴,但具备高压系轴。并且,发电机50与高压系轴连接,发电机50基于高压系轴的旋转而发电。需要说明的是,在该情况下,高压系轴经由第一轴承而支承于壳体61-1。
[0075]
起动电动机64-1与gt60-1的发动机轴63-1连接。在向gt60-1进行的燃料的供给停止时,起动电动机64-1使gt60-1旋转(空转)而为能够运行的状态。
[0076]
循环机构65-1是供工作流体循环的回路(流路)。工作流体是gt60-1的运行所需的流体。在本实施方式中,工作流体是向所述第一轴承、所述第二轴承供给的润滑油。在gt60-1工作时,如前述那样发动机轴63-1通过燃烧气体而旋转。润滑油不仅具有作为各轴承的润滑油的功能,还具有作为排出从燃烧气体向各轴承传递的热量的冷却介质的功能。在运行中的gt60(例如gt60-1)中,工作流体从燃烧气体受热,因此被保持为较高温度。与此相对,在停止中的gt60(例如gt60-2)中,工作流体不从燃烧气体受热,因此工作流体的温度不上
升。
[0077]
需要说明的是,在飞行体1于上空巡航时,伴随飞行体1的飞行高度而外界气温降低。因此,工作流体从冻结的观点来看,处于比地上严苛的环境下。飞行体1巡航时的外界气温例如为-45℃程度。
[0078]
流体压力泵66-1及喷出止回阀67-1均设置于循环机构65-1。
[0079]
流体压力泵66-1使工作流体在循环机构65-1循环。换言之,流体压力泵66-1成为循环机构65-1的驱动源。流体压力泵66-1例如是机械式泵(机动泵)。需要说明的是,流体压力泵66-1例如也可以是电动式泵。
[0080]
喷出止回阀67-1在循环机构65-1中位于流体压力泵66-1的下游侧。喷出止回阀67-1限制循环机构65-1中的工作流体的逆流。
[0081]
需要说明的是,在本实施方式中,在循环机构65-1还设置有流体用传感器65a-1。流体用传感器65a-1是各种传感器120中的润滑油传感器。流体用传感器65a-1取得在循环机构65-1循环的工作流体的温度及压力中的至少1个。在本实施方式中,流体用传感器65a-1取得工作流体的温度及压力这两方。配置流体用传感器65a-1的位置在循环机构65-1中不特别限定。流体用传感器65a-1与控制装置100连接。流体用传感器65a-1的取得结果(即工作流体的温度及压力)向控制装置100发送。
[0082]
并且,在本实施方式中,飞行体1(飞行器用推进系统)还具备多个连通管68、69。多个连通管68、69将多个gt60-1中的gt60-1中的循环机构65-1(以下称作第一循环机构65-1)与多个gt60-1中的gt60-2中的循环机构65-1(以下称作第二循环机构65-2)连通。多个连通管68、69具备第一连通管68及第二连通管69。
[0083]
图4所示的一例中,第一连通管68将第一循环机构65-1中的位于流体压力泵66-1及喷出止回阀67-1的下游侧的部分与第二循环机构65-2中的位于流体压力泵66-2及喷出止回阀67-2的下游侧的部分连通。第二连通管69将第一循环机构65-1中的位于流体压力泵66-1及喷出止回阀67-1的上游侧的部分与第二循环机构65-2中的位于流体压力泵66-2及喷出止回阀67-2的上游侧的部分连通。
[0084]
需要说明的是,也可以如图5所示的另一例那样,第一连通管68将第一循环机构65-1中的位于流体压力泵66-1及喷出止回阀67-1的下游侧的部分与第二循环机构65-2中的位于流体压力泵66-2及喷出止回阀67-2的上游侧的部分连通。在该情况下,第二连通管69将第一循环机构65-1中的位于流体压力泵66-1及喷出止回阀67-1的上游侧的部分与第二循环机构65-2中的位于流体压力泵66-2及喷出止回阀67-2的下游侧的部分连通。
[0085]
多个连通管68、69使工作流体在第一循环机构65-1与第二循环机构65-2之间流通。例如,第一连通管68从第一循环机构65-1向第二循环机构65-2输送工作流体。例如,第二连通管69从第二循环机构65-2向第一循环机构65-1输送工作流体。
[0086]
多个连通管68、69使工作流体在第一循环机构65-1与第二循环机构65-2之间流通,由此在第一循环机构65-1与第二循环机构65-2之间传递热量。需要说明的是,多个连通管68、69像这样以热量的传递为目的而设置。因此,连通管68、69的流路截面积为能够进行热量的传递程度的大小即可。例如,各连通管68、69的流路截面积也可以比各循环机构65-1、65-2的流路截面积小。
[0087]
在本实施方式中,在多个连通管68、69中,分别设置有阀68a、69a。阀68a、69a切换
由各连通管68、69连通的循环机构65-1、65-2之间的连通及切断。阀68a、69a与控制装置100连接。阀68a、69a由控制装置100控制。控制装置100在飞行体1为第一状态的情况下,使阀68a、69a开阀。控制装置100在飞行体1为第二状态的情况下,使阀68a、69a闭阀。
[0088]
[燃气轮机发动机及阀的控制的一例]
[0089]
接着,说明gt60-1、60-2及阀68a、69a的控制的一例。
[0090]
在该控制中,首先控制装置100判定飞行体1是第一状态还是第二状态。需要说明的是,控制装置100也可以基于包含各种传感器120(温度传感器)取得的外界气温在内的飞行信息,来判定飞行体1是第一状态还是第二状态。在此,取得外界气温的各种传感器120可以安装于飞行体1的机体,也可以安装于gt60-1的壳体61-1(参照图3、图4)。
[0091]
在起飞时、降落时等飞行体1为第二状态的情况下,控制装置100在使gt60-1、60-2这两方运行的同时,预先使阀68a、69a闭阀。通过阀68a、69a进行闭阀,从而在各gt60-1、60-2中的循环机构65-1、65-2(即第一循环机构65-1及第二循环机构65-2)各自的内部,工作流体进行循环。由此,例如不存在工作流体的多余的压损等,工作流体有效地发挥功能。其结果是,gt60-1、60-2稳定地运行。
[0092]
在巡航时等飞行体1为第一状态的情况下,控制装置100如前述那样,在使多个gt60-1中的一部分运行的同时,使剩余的gt60-1停止。在本实施方式中,例如,在使gt60-1运行的同时,使gt60-2停止。
[0093]
此时,当预先使阀68a、69a保持闭阀时,在各gt60-1、60-2中的循环机构65-1、65-2(即第一循环机构65-1及第二循环机构65-2)各自的内部,工作流体进行循环。其结果是,在运行中的gt60-1中,使工作流体在循环机构65-1循环,由此能够在使工作流体发挥作为工作流体的功能的同时,将工作流体维持为高温。另一方面,在停止中的gt60-2中,工作流体的温度逐渐降低。其结果是,工作流体有可能冻结。
[0094]
于是,在飞行体1为第一状态的情况下,在本实施方式中,能够采用例如以下的两个控制方法中的任一个。
[0095]
(第一控制方法)
[0096]
第一控制方法是不利用流体用传感器65a的取得结果的控制方法。在第一控制方法中,与在使gt60-1运行的同时使gt60-2停止相配合地,使阀68a、69a开阀。
[0097]
于是,第一循环机构65-1与第二循环机构65-2经由多个连通管68、69而连通。因此,能够使在第一循环机构65-1循环的工作流体与在第二循环机构65-2循环的工作流体经由多个连通管68、69而循环。此时例如,能够使工作流体经由第一连通管68而从第一循环机构65-1向第二循环机构65-2流动,使工作流体经由第二连通管69而从第二循环机构65-2向第一循环机构65-1流动。其结果是,从第一循环机构65-1向第二循环机构65-2供给高温的工作流体,第二循环机构65-2的工作流体的温度的降低得到抑制。
[0098]
(第二控制方法)
[0099]
第二控制方法是利用了流体用传感器65a的取得结果的控制方法。在第二控制方法中,在使gt60-1运行的同时使gt60-2停止时,预先使阀68a、69a保持为闭阀。
[0100]
于是,在各gt60-1中的循环机构65-1、65-2(即,第一循环机构65-1及第二循环机构65-2)各自的内部,工作流体保持循环。其结果是,在运行中的gt60-1中,能够将工作流体维持为高温。另一方面,在停止中的gt60-2中,工作流体的温度逐渐降低。
[0101]
在此,控制装置100能够基于流体用传感器65a-2的取得结果来检测获知第二循环机构65-2的工作流体的温度的降低。控制装置100在基于该取得结果而判定为第二循环机构65-2的工作流体的温度或压力成为了规定的第一阈值以下的情况下,使阀68a、69a开阀。
[0102]
于是,第一循环机构65-1与第二循环机构65-2经由多个连通管68、69而连通。其结果是,来自第一循环机构65-1的高温的工作流体向第二循环机构65-2供给,第二循环机构65-2的工作流体被加热。
[0103]
需要说明的是,所述第一阈值例如是表示比工作流体的凝固点高的温度、或者与该温度对应的压力的值。
[0104]
之后,在第二循环机构65-2的工作流体的温度或压力成为了规定的第二阈值以上的情况下,控制装置100使阀68a、69a闭阀。
[0105]
于是,仅在各gt60-1、60-2中的循环机构65-1、65-2各自的内部,工作流体再次循环。
[0106]
需要说明的是,所述第二阈值是表示比所述第一阈值高的温度或压力的值。
[0107]
之后,与上述同样地,基于流体用传感器65a-2的取得结果来反复进行阀68a、69a的开闭,由此在第二循环机构65-2循环的工作流体的温度或压力被保持在第一阈值与第二阈值之间。其结果是,工作流体的冻结得到抑制。
[0108]
需要说明的是,控制装置100也可以在反复进行阀68a、69a的开闭的过程中,切换运行的gt60。换言之,也可以基于流体用传感器65a-1的取得结果,来切换gt60-1和gt60-2的运行。
[0109]
例如,也可以是,在控制装置100基于流体用传感器65a-2的取得结果而判定出第二循环机构65-2的工作流体的温度或压力成为了规定的第二阈值以上的情况下,控制装置100使阀68a、69a闭阀,并且在使此前运行的gt60-1停止的同时,使此前停止的gt60-2运行。在该情况下,在gt60-2运行之前预先加热工作流体,因此能够缩短或消除从gt60-2起动起到转移至额定最大输出运转为止的暖机运转时间。
[0110]
这样,在飞行体1为第一状态的情况下,控制装置100也可以使gt60-1和gt60-2交替运行。
[0111]
如以上所说明那样,根据本实施方式的飞行体1,例如在gt60-1运行的同时gt60-2停止时等,能够将较高温度的在第一循环机构65-1循环的工作流体向第二循环机构65-2供给,使该工作流体在第二循环机构65-2循环。由此,即便gt60-2停止,也能够提高在第二循环机构65-2循环的工作流体的温度。其结果是,能够抑制gt60-2中的工作流体的冻结,能够提高gt60-2的再启动性。
[0112]
需要说明的是,本发明的技术范围并不限定于所述实施方式,在不脱离本发明的主旨的范围内能够施加各种变更。
[0113]
也可以不存在阀68a、69a。即便在该情况下,例如也能够通过恰当地调整各循环机构65-1、65-2中的工作流体的内压,来使工作流体经由连通管68、69而在各循环机构65-1、65-2之间循环。
[0114]
除此之外,在不脱离本发明的主旨的范围内,能够适当将所述实施方式中的构成要素置换为周知的构成要素,另外,也可以适当组合所述的变形例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1