一种基于柔性绳的太空货物锁定装置及其锁定方法
1.本发明属于载人航天技术领域,特别是涉及一种基于柔性绳的太空货物锁定装置及其锁定方法。
背景技术:
2.太空货物一般包括航天员生活所需的物资、空间站备份设备、试验用空间科学载荷等。随着载人航天技术的不断进步,一次性地向太空运送全部货物的方式已经难以满足多样化的空间探索任务需求。为了保证太空货物能够在有人或者无人操作的情况下多次转运,需要事先将其锁紧、固定在货舱内,然后在货舱之间传递,或者随货运飞船往返地球。
3.由于太空货物的种类多样、形态各异,其上往往未安装统一的接口,因此制定出具有自适应性强、约束可靠、易于控制、可重复使用的舱内锁定装置是实现太空货物安全转运的技术关键。
技术实现要素:
4.有鉴于此,本发明为了解决由于太空货物的种类多样、形态各异,其上往往未安装统一的接口的问题,提出一种基于柔性绳的太空货物锁定装置及其锁定方法,具有自适应性、约束可靠、质量轻、承载大、可重复使用等特点,满足在载人航天技术应用的要求。
5.为实现上述目的,本发明采用以下技术方案:一种基于柔性绳的太空货物锁定装置,包括货舱、软质壳体、绕z轴向锁定系统、绕x轴向锁定系统和绳索导引面板;软质壳体安装在货舱内,货物安置在软质壳体内,所述软质壳体上安装有绳索导引面板,绳索穿过绳索导引面板,绕z轴向锁定系统控制绕z轴向绳索的锁定,绕x轴向锁定系统控制绕x轴向绳索的锁定。
6.更进一步的,所述货舱包括舱底、舱壁和顶盖,所述舱底、舱壁和顶盖围成长方体空间。
7.更进一步的,顶盖在货物投入时保持打开状态,装入后需要借助辅助机构提供沿z向的约束。
8.更进一步的,所述软质壳体的形状与货舱相同,但是尺寸较货舱小,其在顶端开口,方便货物进入。
9.更进一步的,所述绳索导引面板上设置有导向孔。
10.更进一步的,所述绕z轴向锁定系统包括绕z轴向绳索、x向绳索引道、卷筒组i、驱动电机i和差速器i,卷筒组i由卷筒i和卷筒ii组成,绕z轴向绳索处于货舱和软质壳体之间,x向绳索引道安装在舱底一侧的舱壁上,绕z轴向绳索经过x向绳索引道,其两端分别绕在卷筒组i中的卷筒i和卷筒ii上,差速器i的输入轴a与驱动电机i的输出轴相连,卷筒组i中的卷筒i和卷筒ii分别与差速器i的两个输出轴b或c相连,实现差速运动。
11.更进一步的,绕x轴向锁定系统包括绕x轴向绳索、y向绳索引道、卷筒组ii、驱动电机ii、差速器iii和挡块,卷筒组ii由卷筒iii和卷筒iv组成,绕x轴向绳索处于货舱和软质
壳体之间,挡块安装在软质壳体顶部开口两侧,y向绳索引道分别安装在舱底,绕x轴向绳索经过y向绳索引道,其两端分别绕在卷筒组ii中的卷筒iii和卷筒iv上,差速器ii的输入轴a与驱动电机ii的输出轴相连,卷筒组ii中的卷筒iii和卷筒iv分别与差速器ii上的两个输出轴b或c相连,实现差速运动。
12.更进一步的,x向绳索引道、y向绳索引道和导向孔用于引导绳索缠绕的方向。
13.更进一步的,在绕z轴向绳索和绕x轴向绳索绕过软质壳体的两侧,同一根绳索的两道之间装有弹簧。
14.一种利用基于柔性绳的太空货物锁定装置的锁定方法,具体包括以下步骤:
15.(1)、绕z轴锁定过程:绕z轴向绳索通过x向绳索引道和绳索导引面板上的导向孔进行规则有向的缠绕,其两端分别连接卷筒组i中的卷筒i和卷筒ii,给驱动电机i通电,通过卷筒i和卷筒ii的转动,分别收卷绕z轴向绳索的两端,软质壳体开始变形,直到紧紧贴合内部的货物之后,驱动电机i抱死,从而将货物锁紧;
16.在该过程中,当驱动电机i开始工作时,差速器i的两个输出轴同时转动,带动卷筒i和卷筒ii同时转动;差速器i保证了当绕z轴向绳索的一端收卷结束时,另一端还可以继续收卷,使锁紧更稳定可靠;
17.(2)、绕x轴锁定过程:
18.起始状态下,绕x轴向绳索绕过软质壳体开口两侧上的挡块,避免由于绳索缠绕而影响到货物和机械手的进出;然后机械手松开货物并移到货舱外,顶盖关闭,给驱动电机ii通电,通过卷筒iii和卷筒iv的转动拉紧绕x轴向绳索;挡块由于受到绕x轴向绳索的拉紧力作用而脱落,两道绳索之间的距离逐渐缩小,直至将货物锁定;该过程中,差速器ii实现差速收卷运动的原理与差速器i相同。
19.相对于现有技术,本发明所述的一种基于柔性绳的太空货物锁定装置及其锁定方法具有以下优势:
20.1、本发明的柔性绳索对未知轮廓形状和尺寸的太空货物具有较高适应性。
21.2、本发明的锁定装置重量轻,承载大,可重复使用且易于维护。
22.3、本发明的弹簧可以实现两道绳索之间的距离的调整,以适应太空货物的表面不规则形状。
23.4、本发明只需要两个电机即可实现锁定功能,控制更为方便。
附图说明
24.构成本发明的一部分的附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
25.图1为本发明所述的一种基于柔性绳的太空货物锁定装置中太空货物安放空间示意图;
26.图2为本发明所述的一种基于柔性绳的太空货物锁定装置中货舱和软质壳体示意图;
27.图3为本发明所述的一种基于柔性绳的太空货物锁定装置中绕z轴锁定过程示意图;
28.图4为本发明所述的一种基于柔性绳的太空货物锁定装置中绕x轴锁定初始状态
示意图;
29.图5为本发明所述的一种基于柔性绳的太空货物锁定装置中绕x轴锁定结束状态示意图;
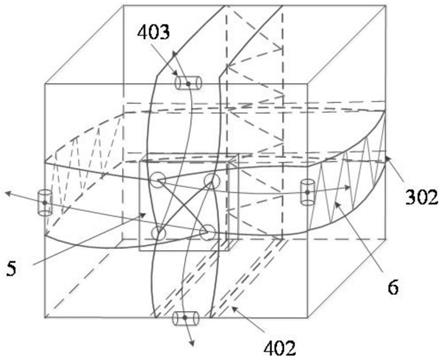
30.图6为本发明所述的一种基于柔性绳的太空货物锁定装置中货物完全锁定状态示意图;
31.图7为本发明所述的一种基于柔性绳的太空货物锁定装置中差速器i的结构示意图;
32.图8为本发明所述的一种基于柔性绳的太空货物锁定装置中差速器ii的结构示意图。
33.附图标记说明:1-货舱,101-舱底,102-舱壁,103-顶盖,2-软质壳体,3-绕z轴向锁定系统,301-绕z轴向绳索,302-x向绳索引道,303-卷筒组i,3031-卷筒i,3032-卷筒ii,304-驱动电机i,305-差速器i,4-绕x轴向锁定系统,401-绕x轴向绳索,402-y向绳索引道,403-卷筒组ii,4031-卷筒iii,4032-卷筒iv,404-驱动电机ii,405-差速器ii,406-挡块,5-绳索导引面板,501-导向孔,6-弹簧,7-货物,a-差速器i或差速器ii的输入轴,b、c-差速器i或差速器ii的输出轴。
具体实施方式
34.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地阐述。需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
35.一、具体实施方式一,参见图1-7说明本实施方式,一种基于柔性绳的太空货物锁定装置,包括货舱1、软质壳体2、绕z轴向锁定系统3、绕x轴向锁定系统4、绳索导引面板5和弹簧6;软质壳体2安装在货舱1内,货物7安置在软质壳体2内,所述软质壳体2上安装有绳索导引面板5,绳索穿过绳索导引面板5,绕z轴向锁定系统3控制绕z轴向绳索301的锁定,绕x轴向锁定系统4控制绕x轴向绳索401的锁定。
36.货舱1包括舱底101、舱壁102、顶盖103。货舱1为长方体空间、开口式结构,其顶盖103在货物7投入时保持打开状态,装入后需要借助辅助机构或结构提供沿z向的约束。
37.软质壳体2的形状与货舱1相同,但是尺寸略小,其在顶端(与货舱顶盖103对应的面)开口,方便货物7进入;软质壳体2上安装有绳索导引面板5,绳索导引面板5上设置有导向孔501。
38.绕z轴向锁定系统3包括绕z轴向绳索301、x向绳索引道302、卷筒组i303、驱动电机i304、差速器i305,绕x轴向锁定系统4包括绕x轴向绳索401、y向绳索引道402、卷筒组ii403、驱动电机ii404、差速器iii405、挡块406,绕z轴向绳索301和绕x轴向绳索401处于货舱1和软质壳体2之间,挡块406安装在软质壳体2顶部开口两侧。
39.x向绳索引道302和y向绳索引道402分别安装在舱底101和一侧的舱壁102上,绕z轴向绳索301和绕x轴向绳索401分别经过x向绳索引道302和y向绳索引道402,并分别绕在卷筒组i303和卷筒组ii403上。x向绳索引道302、y向绳索引道402和导向孔501用于引导绳索缠绕的方向。
40.在绕z轴向绳索301和绕x轴向绳索401绕过软质壳体2的两侧,同一根绳索的两道
之间装有弹簧6,弹簧6可以使两道绳索在勒紧过程中适应可能遇到的棱边、凸起等不规则形状,实现自适应。
41.卷筒组i303包括卷筒i3031和卷筒ii3032,卷筒组ii403包括卷筒iii4031和卷筒iv4032,差速器i305和差速器ii405均为常见的齿轮差速器,其输入轴a分别与驱动电机i304和驱动电机ii404的输出轴相连,卷筒组i303和卷筒组ii403中的两个卷筒分别与差速器i305和差速器ii405上的两个输出轴b、c相连,可以实现差速运动。
42.在本发明中,货物7事先由机械手放入软质壳体2中,然后启动舱内锁定方案。本发明采用绳索捆扎方式,利用绳索对结构尺寸的适应性约束单向自由度,采用交叉捆扎保证多向约束,最后利用对绳索最终位置的自锁约束,保持预紧力。
43.本发明所述的一种基于柔性绳的太空货物锁定方案的锁定方法,具体包括以下步骤:
44.1、绕z轴锁定过程。参考图3说明本过程。
45.绕z轴向绳索301通过x向绳索引道302和绳索导引面板5上的导向孔501进行规则有向的缠绕,其两端分别连接卷筒组i303中的卷筒i3031和卷筒ii3032。给驱动电机i304通电,通过卷筒i3031和卷筒ii3032的转动,分别收卷绕z轴向绳索301的两端,软质壳体2开始变形,直到紧紧贴合内部的货物7之后,驱动电机i304抱死,从而将货物7锁紧。如果货物7较高(即z向尺寸较大),可在z向叠加多根绳索,使约束更可靠。
46.在该过程中,当驱动电机i304开始工作时,差速器i305的两个输出轴同时转动,带动卷筒i3031和卷筒ii3032同时转动。但是由于绕z轴向绳索301在收卷过程中所受到的摩擦力等因素,其两端的收卷运动可能是不同步的,差速器i305保证了当绕z轴向绳索301的一端收卷结束时,另一端还可以继续收卷,使锁紧更稳定可靠。
47.2、绕x轴锁定过程。参考图4-图5说明本过程。
48.起始状态下,绕x轴向绳索401绕过软质壳体2开口两侧上的挡块406,避免由于绳索缠绕而影响到货物7和机械手的进出。然后机械手松开货物7并移到货舱1外,顶盖103关闭,给驱动电机ii404通电,通过卷筒组ii403中的卷筒iii4031和卷筒iv4032的转动拉紧绕x轴向绳索401。挡块406由于受到绕x轴向绳索401的拉紧力作用而脱落,两道绳索之间的距离逐渐缩小,直至将货物7锁定。该过程中,差速器ii405实现差速收卷运动的原理与差速器i305相同。
49.以上公开的本发明实施例只是用于帮助阐述本发明。实施例并没有详尽叙述所有的细节,也不限制该发明仅为所述的具体实施方式。根据本说明书的内容,可作很多的修改和变化。本说明书选取并具体描述这些实施例,是为了更好地解释本发明的原理和实际应用,从而使所属技术领域技术人员能很好地理解和利用本发明。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1