电动制动器的制作方法
1.本公开涉及运载工具的制动器组件。
背景技术:
2.诸如飞行器的运载工具可使用包括多盘式制动器组件的车轮制动器组件。例如,该多盘式制动器组件可包括盘叠堆,该盘叠堆包括与车轮接合的多个转子盘和与转子盘交错的多个定子盘。转子盘和车轮被构造成围绕轴旋转,而定子盘保持静止。为了使旋转车轮的旋转运动减速,制动器组件可使活塞抵靠压板移位,以抵靠静止的定子盘压缩与车轮接合的旋转转子盘,从而产生使车轮的旋转运动减速的扭矩。
技术实现要素:
3.在一些示例中,本公开描述了与运载工具的制动器组件相关的制品、系统和技术。该制动器组件包括马达和谐波驱动器,该谐波驱动器被构造成将由马达生成的扭矩传递到制动盘叠堆。该制动器组件可包括:盘叠堆,该盘叠堆被构造成当盘叠堆被压缩时减少和/或防止车轮的旋转;活塞,该活塞被构造成在盘叠堆上施加压缩力;和致动器,该致动器被构造成使用马达的轴旋转使活塞线性地平移。该致动器可被构造成使用谐波驱动器将马达产生的扭矩传递到线性致动器。在一些示例中,马达围绕马达轴线生成轴旋转,并且线性致动器沿着不同于马达轴线(例如,从马达轴线移位)的压缩轴线平移活塞。与其中单个轴线既用作马达轴线又用作压缩轴线的直列式致动器相比,马达轴线与单独压缩轴线之间的位移允许更紧凑的致动器构型。
4.在示例中,一种制动器组件包括:制动盘叠堆;致动器组件,该致动器组件包括:电动马达,该电动马达被构造成围绕马达轴线生成第一旋转扭矩;谐波驱动器,该谐波驱动器被构造成响应于第一旋转扭矩而生成第二旋转扭矩;齿轮组,该齿轮组包括输出齿轮,该输出齿轮被构造成响应于第二旋转扭矩而旋转;和线性致动器,该线性致动器与齿轮组机械地联接,其中该线性致动器被构造成沿着压缩轴线生成线性运动并且在输出齿轮旋转时致使活塞压缩制动盘叠堆,其中压缩轴线不同于马达轴线。
5.在示例中,一种制动器组件包括:盘叠堆;活塞,该活塞被构造成压缩盘叠堆;电动马达,该电动马达包括马达壳体和马达轴,其中该电动马达被构造成使马达轴相对于马达壳体以第一速度并沿第一方向围绕马达轴线旋转;谐波驱动器,该谐波驱动器与马达轴机械地接合,其中该谐波驱动器被构造成致使柔性花键以小于第一速度的旋转速度并沿与第一方向相反的第二方向围绕马达轴线旋转;输出齿轮,该输出齿轮被构造成围绕压缩轴线旋转,其中该柔性花键被构造成引起输出齿轮的旋转;和线性致动器,该线性致动器包括驱动器和螺杆,其中该输出齿轮被构造成引起驱动器的旋转,并且其中驱动器的旋转致使螺杆沿着压缩轴线相对于马达壳体平移以致使活塞压缩盘叠堆。
6.在示例中,一种方法包括:使用电动马达围绕马达轴线生成第一旋转扭矩,使用谐波驱动器响应于第一旋转扭矩而生成第二旋转扭矩;使用第二旋转扭矩旋转齿轮组的输出
齿轮;以及使用输出齿轮的旋转致使线性致动器沿着压缩轴线生成线性运动,其中压缩轴线不同于马达轴线;以及使用线性致动器的线性运动致使活塞压缩盘叠堆。
7.附图和以下描述中阐述了一个或多个示例的细节。其他特征、目的和优点将从描述和附图以及从权利要求书中显而易见。
附图说明
8.图1是示出示例性车轮的透视图。
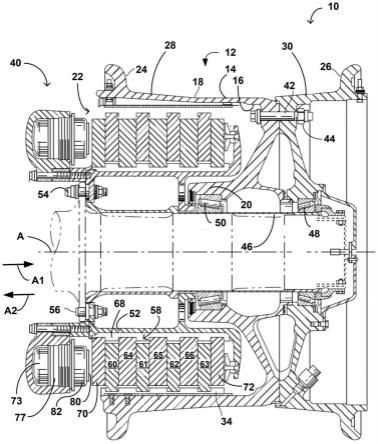
9.图2是包括图1的车轮的示例性车轮和制动器组件的示意性截面视图。
10.图3是示出示例性致动器的示意图。
11.图4是示出图3的示例性致动器的另一视图的示意图。
12.图5是示例性谐波驱动器的示意图。
13.图6a是处于第一构型的图5的谐波驱动器的示意图。
14.图6b是处于第二构型的图5和图6a的谐波驱动器的示意图。
15.图6c是处于第三构型的图5、图6a和图6b的谐波驱动器的示意图。
16.图6d是处于第四构型的图5和图6a至图6c的谐波驱动器的示意图。
17.图7是示出示例性致动器和示例性线性致动器的示意图。
18.图8是示出对盘叠堆进行压缩的示例性技术的流程图。
具体实施方式
19.本公开描述了涉及运载工具的制动器组件的制品、系统和技术,该制动器组件包括马达和谐波驱动器,该谐波驱动器被构造成将由马达生成的扭矩传递到制动盘叠堆。制动器组件包括盘叠堆,该盘叠堆包括一个或多个转子盘和一个或多个定子盘。例如,盘叠堆可包括与多个定子盘交错的多个转子盘。转子盘与运载工具的车轮旋转地联接,使得车轮围绕车轮轴线的旋转引起转子盘围绕车轮轴线的旋转。定子盘被构造成相对于车轮和转子盘保持基本上静止。制动器组件被构造成压缩盘叠堆以引起旋转转子盘和静止定子盘上的摩擦表面的接合,从而降低转子盘围绕车轮轴线的旋转速度。转子盘被构造成接合车轮,使得转子盘的旋转速度的减小引起车轮的速度的减小。
20.该制动器组件包括致动器组件,该致动器组件被构造成当需要制动时(例如,响应于用户输入或更自动的控制)引起盘叠堆的压缩。在一些示例中,致动器组件被构造成引起活塞的平移,该活塞被构造成在盘叠堆上施加压缩力。由致动器组件施加的压缩力致使转子盘和定子盘可滑动地平移(例如,沿车轮的轴向方向)以引起旋转转子盘与固定定子盘之间的接合,从而生成和/或增加车轮上的制动力。致动器组件还被构造成减少和/或消除盘叠堆上的压缩力,以便减少旋转转子盘与固定定子盘之间的接合,从而减少车轮上的制动力。例如,致动器组件可被构造成在盘叠堆上施加压缩力以减少和/或减小车轮的旋转,并且可被构造成减少和/或消除压缩力以允许和/或增加车轮的旋转。
21.制动器组件可包括控制电路,该控制电路被构造成基于制动信号而致使致动器组件压缩盘叠堆。例如,控制电路可被构造成响应于用户输入装置(例如,脚踏开关)的致动而传输制动信号,该用户输入装置远离制动器组件定位(例如,定位在飞行器的驾驶舱中)。在本文所述的示例中,致动器组件包括马达(例如,电动马达),该马达被构造成响应于制动信
号而生成旋转运动并将马达的旋转运动转换成线性平移以便引起盘叠堆的压缩。
22.在示例中,马达被构造成基于例如制动信号而引起沿马达轴的第一旋转方向(“第一轴方向”)和沿与第一轴方向相反的马达轴的第二旋转方向(“第二轴方向”)的旋转运动。致动器组件被构造成将沿第一轴方向的旋转运动转换成沿第一方向的线性平移,以例如增加和/或引发施加在阀盘叠堆上的压缩力。致动器组件可被构造成将沿第二轴方向的旋转运动转换成沿与第一方向相反的第二方向的线性平移,以例如减少和/或消除施加在盘叠堆上的压缩力。在示例中,马达限定壳体并且被构造成生成马达轴相对于壳体的旋转运动。壳体可相对于制动器组件的某部分(诸如扭矩管)基本上静止。
23.在示例中,致动器组件被构造成使用马达以第一旋转速度生成第一旋转扭矩,使用谐波驱动器以小于第一旋转速度的第二旋转速度生成第二旋转扭矩,并且使用线性致动器将第二旋转扭矩转换成线性运动以平移活塞。活塞可被构造成引起盘叠堆上的压缩力。在示例中,马达被构造成围绕马达轴线生成第一旋转扭矩,并且线性致动器被构造成沿着不同于马达轴线的压缩轴线产生线性运动。谐波驱动器被构造成接收第一旋转扭矩并将第二旋转扭矩提供到齿轮组。齿轮组可被构造成接收第二旋转扭矩并致使输出齿轮将第二旋转扭矩的至少某部分传递到线性致动器,使得线性致动器可引起沿着压缩轴线的线性运动。线性致动器可被构造成使活塞基本上沿着压缩轴线移位。
24.因此,在一些示例中,致动器组件被构造成使得马达围绕马达轴线生成第一旋转扭矩,并且线性致动器通过使活塞沿着不同于马达轴线的压缩轴线移位来引起盘叠堆的压缩。与其中单个轴线既用作马达轴线又用作压缩轴线的直列式致动器相比,马达围绕马达轴线生成第一扭矩并且线性致动器使活塞在单独的压缩轴线上平移的布置可允许更紧凑的致动器组件构型。
25.致动器组件可被构造成在制动操作期间基本上逐步降低由马达生成的旋转速度,以便允许对线性运动进行更精细控制,以增加或减小盘叠堆上的压缩力。对线性运动的更精细控制可使得能够增加对施加到盘叠堆的压缩力的控制,从而潜在地改善制动系统的响应性和灵敏度。在一些示例中,致动器组件使用谐波驱动器逐步降低由马达生成的旋转速度。谐波驱动器的使用可减少和/或消除在主要使用啮合的齿轮箱实现速度逐步降低的制动器组件中可能发生的马达速度改变期间的齿轮齿隙。与使用齿轮箱的制动系统相比,谐波驱动器的相对平稳操作可允许增加每秒的制动操作,该齿轮箱具有输入齿轮,该输入齿轮被构造成与马达同步旋转以实现速度逐步降低。
26.在示例中,致动器组件被构造成当线性致动器将由马达产生的旋转运动转换成线性平移时平移活塞。例如,致动器组件可被构造成引起活塞沿基本上平行于车轮轴线的方向的平移。该活塞被构造成平移以引起盘叠堆上的压缩力(或消除先前施加的压缩力)。在一些示例中,致动器组件包括致动器主体,该致动器主体被构造成相对于制动器组件的一部分(例如,扭矩管)基本上静止,并且致动器组件被构造成使用线性平移使活塞相对于致动器主体平移。在一些示例中,致动器组件被构造成当马达沿第一轴方向生成旋转运动时致使活塞沿第一方向平移(例如,增加和/或引发盘叠堆上的压缩力),并且被构造成当马达沿第二轴方向生成旋转运动时致使活塞沿与第一方向相反的第二方向平移(例如,以减少和/或消除盘叠堆上的压缩力)。
27.致动器组件的谐波驱动器被构造成从马达沿第一旋转方向并以第一旋转速度接
收第一旋转扭矩,并且使用第一旋转扭矩产生第二旋转扭矩。谐波驱动器被构造成沿与第一旋转方向相反的第二旋转方向并以小于第一旋转速度的第二旋转速度产生第二旋转扭矩。在一些示例中,谐波驱动器包括谐波发生器,该谐波发生器被构造成从马达(例如,马达轴)接收第一旋转扭矩,并且当马达轴相对于马达壳体旋转时沿相同旋转方向相对于马达壳体旋转。例如,谐波驱动器可包括柔性花键,该柔性花键被构造成使得当谐波发生器沿第一旋转方向旋转时(例如,在第一旋转扭矩的影响下),柔性花键沿第二旋转方向产生第二旋转扭矩。因此,马达轴的旋转方向(例如,沿第一轴方向或第二轴方向)可确定第一旋转扭矩的第一旋转方向,并且因此可确定第二旋转扭矩的第二旋转方向。
28.马达可通过至少致使马达轴沿第一轴方向或第二轴方向旋转而将第一旋转扭矩沿第一旋转方向施加到谐波驱动器。因此,如本文所用,第一旋转方向是指由马达施加到谐波驱动器的第一旋转扭矩的旋转方向,而不是由马达采用来施加第一旋转扭矩的轴旋转方向。第二旋转方向是指由谐波驱动器使用第一旋转扭矩产生的第二旋转扭矩的旋转方向,而不是当谐波驱动器生成第二旋转扭矩时由马达采用的轴旋转方向。
29.类似地,谐波驱动器的柔性花键可沿第一花键方向或与第一花键方向相反的第二花键方向旋转,以沿与第一旋转方向相反的第二旋转方向产生第二旋转扭矩。在一些示例中,马达轴和柔性花键围绕公共轴线(例如,马达轴线)旋转,并且马达轴和柔性花键被构造成围绕公共轴线沿相反的旋转方向旋转。
30.在一些示例中,可称为谐波减速器的谐波驱动器具有任何合适的构型。在一些示例中,谐波驱动器包括:固定花键,该固定花键被构造成相对于马达壳体保持基本上静止;和柔性花键。该柔性花键限定外部齿轮齿,该外部齿轮齿被构造成与由固定花键限定的内部齿轮齿啮合,以沿第二旋转方向并以第二速度生成第二旋转扭矩。在一些示例中,固定花键限定基本上圆形的(例如,圆形的或在制造公差允许范围内接近圆形的)节圆,并且谐波发生器被构造成致使柔性花键限定基本上椭圆的节圆。在这些示例中的一些示例中,谐波驱动器被构造成致使柔性花键的外部齿在基本上沿着基本上椭圆节圆的长轴的点处与圆形花键的内部齿啮合以生成第二旋转扭矩。谐波驱动器被构造成基于取决于柔性花键的齿数(例如,齿的数量)和固定花键的齿数的减速比,引起从第一旋转扭矩到第二旋转扭矩的速度降低。在示例中,固定花键的齿数大于柔性花键的齿数。
31.谐波驱动器(例如,谐波驱动器的柔性花键)可被构造成将第二旋转扭矩施加到齿轮组的输入齿轮以引起输入齿轮的旋转。例如,谐波驱动器可被构造成基于第二旋转扭矩的第二旋转方向引起输入齿轮的旋转。在一些示例中,齿轮组包括输出齿轮,并且输入齿轮被构造成当谐波驱动引起输入齿轮的旋转时引起输出齿轮的旋转。齿轮组可被构造成使得输入齿轮的旋转方向(例如,由谐波驱动器旋转)基本上确定输出齿轮的旋转方向(“输出齿轮方向”)。因此,致动器组件可被构造成使得当马达轴将第一旋转扭矩沿第一旋转方向施加到谐波驱动器,并且谐波驱动器使用第一旋转扭矩来将第二旋转扭矩沿第二旋转方向施加到输入齿轮时,输出齿轮方向由马达轴的旋转方向确定。
32.在一些示例中,致动器组件被构造成使得马达轴沿第一轴方向的旋转致使输出齿轮沿第一输出齿轮方向旋转,并且使得马达轴沿第二轴方向的旋转致使输出齿轮沿与第一输出齿轮方向相反的第二输出齿轮方向旋转。
33.在一些示例中,线性致动器被构造成使用输出齿轮的旋转直接或间接地产生线性
运动。例如,致动器组件可被构造成使得输出齿轮沿第一输出齿轮方向的旋转致使线性致动器沿第一方向生成线性运动,并且输出齿轮沿第二输出齿轮方向的旋转致使线性致动器沿第二方向生成线性运动。因此,致动器组件可被构造成使得当马达轴沿第一轴方向旋转以致使输出齿轮沿第一输出齿轮方向旋转时,线性致动器使活塞沿第一方向移位以增加和/或引发盘叠堆上的压缩力,并且当马达轴沿第二轴方向旋转以致使输出齿轮沿第二输出齿轮方向旋转时,线性致动器使活塞沿第二方向移位以减少和/或消除盘叠堆上的压缩力。
34.在一些示例中,线性致动器包括驱动器,该驱动器被构造成当驱动器相对于螺杆旋转时致使螺杆线性地平移。输出齿轮可被构造成当马达(例如,经由谐波驱动器)引起输出齿轮的旋转时引起驱动器的旋转。线性致动器可被构造成使得驱动器围绕螺杆的旋转方向确定螺杆的线性平移的方向(例如,第一方向或第二方向)。因此,线性致动器可被构造成基于从齿轮组所接收的旋转运动的方向生成线性运动。在一些示例中,驱动器为滚珠螺母,并且螺杆为滚珠螺杆。线性致动器可被构造成致使滚珠螺母与滚珠螺杆之间的多个滚珠轴承在滚珠螺母相对于滚珠螺杆旋转时向滚珠螺杆传输力。
35.因此,本文所述的制动器组件被构造成使用致动器组件在盘叠堆上施加压缩力以控制施加到车轮的制动力。致动器组件被构造成使用马达以第一旋转速度生成第一旋转扭矩(例如,围绕由马达限定的马达轴线)并且使用谐波驱动器以第二旋转速度生成第二旋转扭矩。致动器组件可被构造成使用第二旋转扭矩来使活塞沿着不同于马达轴线的压缩轴线平移。与其中单个轴线既用作马达轴线又用作压缩轴线的直列式致动器相比,马达围绕马达轴线生成第一扭矩并且线性致动器使活塞在单独的压缩轴线上方平移的布置可允许更紧凑的致动器组件。与主要使用啮合的齿轮箱实现速度逐步减低的制动系统相比,谐波驱动器的使用可减少和/或消除马达速度改变期间的齿轮齿隙,并且可允许增加每秒的制动操作。
36.图1是示出示例性车轮10的透视图。在一些示例中,车轮10为飞行器运载工具的一部分。在其他示例中,车轮10可为任何其他运载工具的一部分,诸如任何陆地运载工具或其他运载工具。在图1所示的示例中,车轮10包括限定外表面14和内表面16的车轮轮辋12。车轮轮辋12包括管井18和车轮轮毂20。在一些示例中,内表面16可包括车轮10的管井18的内径。例如,在一些情况下,内表面16可被称为车轮10的内径表面。内表面16和车轮轮毂20可在内表面16与车轮轮毂20之间限定车轮腔22(例如,体积)。在一些示例中,轮胎(未示出)可安装在轮辋12的外表面14上。车轮10可包括内侧胎圈座24和外侧胎圈座26,该内侧胎圈座和该外侧胎圈座被构造成将轮胎保持在轮辋12的外表面14上。在示例中,车轮10可包括内侧区段28(例如,包括内侧胎圈座24)和外侧区段30(例如,包括外侧胎圈座26)。车轮10被构造成围绕旋转轴线a旋转。车轮10的轴向方向a1平行于旋转轴线a。车轮10的轴向方向a2平行于旋转轴线a并且与方向a1相反。
37.车轮10包括在车轮10的内表面16上的多个转子驱动键32,诸如转子驱动键34和转子驱动键36。在一些示例中,多个转子驱动键32中的每个转子驱动键在车轮10的轴向方向a1上(例如,在平行于旋转轴线a的方向上)延伸。多个转子驱动键32(“转子驱动键32”)和内表面16被构造成相对于彼此基本上静止,使得当车轮10(和内表面16)围绕旋转轴线a旋转时,转子驱动键(例如,转子驱动键34、36)中的每个转子驱动键在围绕轴线a的闭合路径上
平移。因此,当车轮10、内表面16和转子驱动键32围绕旋转轴线a旋转时,作用于转子驱动键32中的一个或多个转子驱动键上的与旋转方向相反的力起作用来减慢或停止旋转。转子驱动键32可被构造成从制动器组件(图2所示的制动器组件40或其他制动器组件)接收扭矩,该制动器组件被构造成减少和/或停止车轮10的旋转。转子驱动键32可与内表面16一体地形成,或者可与内表面16分离并机械地附连到该内表面。
38.图2是示出车轮10和示例性制动器组件40的示意性截面图。车轮10包括车轮轮辋12、外表面14、内表面16、车轮腔22、车轮轮毂20、内侧胎圈座24、外侧胎圈座26、内侧区段28、外侧区段30和转子驱动键34。图2示出了作为分裂轮辋车轮的车轮轮辋12,其中凸耳螺栓42和凸耳螺母44连接内侧区段28和外侧区段30,然而在其他示例中,车轮轮辋12可利用其他构型(例如,整体轮辋)。示出并描述了车轮10及制动器组件40以向本文所述的示例性驱动衬套提供环境。然而,在其他示例中,本文所述的驱动衬套可与任何合适的车轮及制动器组件一起使用。
39.车轮10被构造成围绕延伸穿过轴向组件46的车轮轴线a旋转。轴向组件46被构造成支撑车轮10,同时允许车轮10使用轴承48和轴承50围绕车轮轴线a旋转。例如,轴承48、50可限定围绕轴向组件46的基本上圆形的轨道。扭矩管52联接到轴向组件46(例如,经由螺栓54、56),使得当车轮10围绕轴向组件46和车轮轴线a旋转时,扭矩管52保持基本上静止。扭矩管52可至少部分地围绕轴向组件46的外部。轴向组件46可机械地联接到附接到运载工具的结构(例如,支柱)。
40.在图2所示的示例中,所描绘的制动器组件40的该部分被示出为定位在车轮10内并且被构造成接合扭矩管52和转子驱动键34。制动器组件40被构造成生成扭矩以对抗车轮10围绕车轮轴线a的旋转并将该扭矩传递到转子驱动键34,从而减少和/或消除车轮10围绕车轮轴线a的旋转。制动器组件40包括盘叠堆58,该盘叠堆包括一个或多个转子盘(例如,转子盘60、61、62、63)和一个或多个定子盘(例如,定子盘64、65、66)。转子盘60、61、62、63和/或定子盘64、65、66可具有任何合适的构型。例如,转子盘60、61、62、63和/或定子盘64、65、66可各自为包围轴向组件46的基本上环形的盘。定子盘64、65、66经由花键68联接到扭矩管52,并且在车轮10旋转时相对于扭矩管52(和轴向组件46)保持旋转静止。转子盘60、61、62、63旋转地联接到转子驱动键34和内表面16并且围绕轴线a与车轮10基本上同步地旋转。例如,转子驱动键34可被构造成延伸穿过转子盘60、61、62、63中的一个或多个转子盘的周边上的驱动槽,以使转子盘60、61、62、63与车轮10基本上同步地旋转。盘叠堆58可包括任何数量的转子盘和定子盘。
41.转子盘60、61、62、63和/或定子盘64、65、66可被构造成提供用于制动运载工具诸如飞行器的相对摩擦表面。盘叠堆58的压缩(例如,在压板70和背衬板72之间)可使相对的摩擦表面接触,从而在与车轮10基本上同步地旋转的转子盘和相对于扭矩管52保持基本上静止的定子盘之间产生剪切力。剪切力可导致与转子驱动键34接合的转子盘(例如,转子盘60、61、62、63)在转子驱动键34上施加与车轮10的旋转相反的扭矩。转子盘可使用转子驱动键34延伸穿过其中的驱动槽来向转子驱动键34施加反向的扭矩。
42.包括致动器主体77的致动器组件73被构造成致使活塞82相对于致动器主体77平移以引起盘叠堆58的压缩。致动器组件73可被构造成致使活塞82沿方向a1和方向a2平移。例如,致动器组件73可被构造成当活塞82基本上沿方向a1平移时致使活塞82压缩盘叠堆
58,并且被构造成当活塞82基本上沿方向a2平移时致使活塞82减轻(例如,减少和/或消除)压缩。制动器组件40可被构造成使得盘叠堆58的压缩(例如,通过使活塞82基本上沿方向a1平移)引起转子盘60、61、62、63和定子盘64、65、66的摩擦表面之间的接合,从而生成制动力以减少和/或基本上防止车轮10的旋转。制动器组件40可被构造成使得减少和/或消除盘叠堆58的压缩(例如,通过使活塞82基本上沿方向a2平移)减少和/或消除转子盘60、61、62、63和定子盘64、65、66的接合,从而减少和/或消除车轮10上的制动力。
43.在图2所示的示例中,活塞82限定活塞面80,该活塞面被构造成当致动器组件73使活塞82沿方向a1平移时在压板70上建立接触压力。致动器组件73被构造成通过致使活塞82沿方向a1平移来增加接触压力,以便增加由转子盘60、61、62、63和定子盘64、65、66的摩擦表面在车轮10上生成的制动力。致动器组件73被构造成通过致使活塞82沿方向a2平移来减小接触压力,以便减小由转子盘60、61、62、63和定子盘64、65、66的摩擦表面在车轮10上生成的制动力。
44.在示例中,致动器组件73被构造成致使活塞82使用由电动马达生成的运动(例如,旋转运动)来平移。致动器组件73可被构造成将电动马达的旋转运动转换成线性运动,以引起活塞82沿方向a1和/或方向a2的平移。在一些示例中,致动器组件73被构造成使用电动马达以第一速度生成第一旋转扭矩,并且以小于第一速度的第二速度将第一旋转扭矩转换成第二旋转扭矩。致动器组件73可被构造成使用第二旋转扭矩旋转线性致动器的某部分,以便引起活塞82沿方向a1和方向a2的平移。
45.在示例中,致动器组件73还包括谐波减速器,该谐波减速器被构造成以第一速度接收第一旋转扭矩并以第二速度生成第二旋转扭矩。在一些示例中,致动器组件73进一步包括齿轮组,该齿轮组被构造成使得电动马达围绕马达轴线生成第一旋转扭矩,并且活塞82沿着压缩轴线压缩盘叠堆58,其中马达轴线不同于压缩轴线(例如,从压缩轴线移位)。
46.车轮10和制动器组件40可与任何种类的私人、商业或军用飞行器或其他类型的运载工具一起使用。车轮10可经由例如轴向组件46或允许车轮10围绕车轮轴线a旋转的某个其他适当布置安装到运载工具。轴向组件46可安装在起落装置(未示出)或运载工具的其他合适部件的撑条上以将车轮10连接到运载工具。车轮10可围绕车轮轴线a和轴向组件46旋转以向运载工具施加运动。示出并描述了车轮10来为本文所述的制动器组件提供上下文,然而,在其他示例中,本文所述的制动器组件可与任何合适的车轮组件一起使用。
47.图3是示例性致动器组件74的概念图,并参考所示的x-y-z轴,以横截面和功能框图的形式示出了致动器组件74的一部分。致动器组件74包括致动器主体78。致动器组件74为致动器组件73的示例,并且致动器主体78为致动器主体77(图2)的示例。图4示出了致动器组件74的另一视图并且包括图3的x-y-z轴以供参考。致动器组件74包括马达84、谐波驱动器86、齿轮组88和线性致动器90。谐波驱动器86的部分在图4中以虚线示出。轴向方向a1和a2在图3和4中示出,其中轴向方向a1从页面中出来,而轴向方向a2进入图4中的页面。
48.致动器组件74被构造成在需要制动时使用活塞82引起盘叠堆58的压缩。致动器组件74被构造成使活塞82沿第一方向(例如,沿轴向方向a1)平移,以引起盘叠堆58上的压缩力(例如,经由压板70),从而生成和/或增加车轮10(图1)上的制动力。致动器组件74被构造成使活塞82沿与第一方向基本上相反的第二方向(例如,轴向方向a2)平移以减少和/或消除盘叠堆58上的压缩力,以便减少和/或基本上消除车轮10上的制动力。在图3和图4所示的
示例中,致动器主体78被构造成相对于制动器组件40的一部分(例如,扭矩管52或某个其他部分)基本上静止。在一些示例中,致动器组件74被构造成使活塞82相对于致动器主体78平移。
49.致动器组件74被构造成将马达84产生的旋转运动转换成活塞82的线性平移,以控制由制动器组件40(图2)在车轮10上生成的制动力。在图3和图4所示的示例中,马达84包括马达壳体92和马达轴94,并且马达84被构造成通过至少引起马达轴94相对于马达壳体92的旋转而生成旋转运动。马达壳体92可被构造成相对于致动器主体78基本上静止。马达84可被构造成引起马达轴94围绕由马达轴94限定的马达轴线ma的旋转。在示例中,马达84被构造成引起马达轴94沿第一轴方向r1的(例如,围绕马达轴线ma顺时针方向的)和沿与第一轴方向r1基本上相反的第二轴方向r2的(例如,围绕马达轴线ma逆时针方向的)旋转。马达壳体92可被构造成相对于致动器主体78基本上静止。此外,第一轴方向r1和第二轴方向r2仅作为示例示出。在其他示例中,第一轴方向r1可为逆时针方向并且第二轴方向r2可为围绕马达轴线ma顺时针方向,或者第一轴方向r1和第一轴方向r2可相对于致动器组件74具有某个其他布置。
50.在一些示例中,致动器组件74被构造成使得马达轴94沿第一轴方向r1的旋转运动致使活塞82增加和/或引发盘叠堆58上的压缩力,从而增加从制动器组件40传输到车轮10的制动力(例如,经由转子驱动键32、34、36(图1和图2))。另外,致动器组件74可被构造成使得马达轴94沿第二轴方向r2的旋转运动致使活塞82减小和/或基本上消除盘叠堆58上的压缩力,从而减小从制动器组件40传输到车轮10的制动力。在示例中,致动器组件74被构造成将马达轴94沿第一轴方向r1的旋转运动转换成活塞82沿第一方向(例如,轴向方向a1)的线性平移,并且将马达轴94沿第二轴方向r2的旋转运动转换成活塞82沿第二方向(例如,轴向方向a2)的线性平移。
51.控制电路96被构造成控制致动器组件74。例如,控制电路96可被构造成将制动信号传输到致动器组件74以致使致动器组件74使活塞82平移。在示例中,控制电路96被构造成使用通信链路98传输制动信号。马达84可被构造成响应于制动信号而生成旋转运动。在一些示例中,控制电路96被构造成从输入装置102(例如,驾驶舱中的脚踏开关和/或防抱死制动系统(abs))接收用户输入,并且基于用户输入将制动信号传输到致动器组件74。输入装置102可使用通信链路104将制动信号传输到控制电路96。在示例中,控制电路96被构造成接收第一用户输入(例如,指示需要增加制动)并将制动信号传输到致动器组件74,从而致使马达84沿第一轴方向r1生成旋转运动,并且被进一步构造成接收第二用户输入(例如,指示需要减少制动)并将制动信号传输到致动器组件74,从而致使马达84沿第二轴方向r2生成旋转运动。
52.致动器组件74被构造成使用马达84以第一旋转速度产生第一旋转扭矩。在示例中,致动器组件74使用马达轴94的旋转产生第一旋转扭矩。致动器组件74可沿第一旋转方向产生第一旋转扭矩。在示例中,第一旋转扭矩的第一旋转方向由马达轴94的旋转方向确定。当马达轴94沿第一轴方向r1或第二轴方向r2旋转时,马达轴94可生成具有第一旋转方向的第一旋转扭矩。因此,在一些示例中,第一旋转扭矩的第一旋转方向具有与第一轴方向r1相同的旋转方向(如t1-a(图4)所示),并且在其他示例中,第一旋转扭矩的第一旋转方向具有与第二轴方向r2相同的旋转方向(如t1-b(图4)所示)。在一些示例中,致动器组件74被
构造成使得第一旋转扭矩围绕马达轴线ma起作用。除此之外或替代地,在一些示例中,致动器组件74被构造成使得第一旋转扭矩围绕马达轴94起作用。
53.致动器组件74被构造成通过至少使用第一旋转扭矩来逐步降低第一旋转速度以产生具有小于第一旋转速度的第二旋转速度的第二旋转扭矩。在示例中,第一旋转速度取决于或基本上等于马达轴94的旋转速度。逐步减低第一旋转速度可允许马达84成为相对高速的马达,该马达被构造成以更高的轴速度生成旋转,这对于致动器组件74的其他部件(例如,齿轮组88和/或线性致动器90)可能是期望的。此外,由马达84产生的第一旋转扭矩可低于致动器组件74的操作可能需要的扭矩。将第一旋转速度逐步减低到第二旋转速度可致使产生的第二旋转扭矩超过第一旋转扭矩,使得致动器组件74的其余部分(例如,齿轮组88和/或线性致动器90)可通过超过马达84产生的扭矩的扭矩来作用。因此,在示例中,致动器组件74被构造成使用马达84以第一旋转速度产生的第一旋转扭矩来以第二旋转速度产生第二旋转扭矩,其中第二旋转扭矩大于第一旋转扭矩并且第二旋转速度小于第一旋转速度。
54.谐波驱动器86被构造成从马达84接收第一旋转扭矩(例如,t1-a或t1-b)并且响应于第一旋转扭矩而以第二旋转速度产生第二旋转扭矩。在一些示例中,第二旋转速度小于第一旋转速度。在一些示例中,第二旋转扭矩大于第一旋转扭矩。在一些示例中,第一旋转扭矩具有第一旋转方向,并且谐波驱动器86被构造成沿与第一旋转方向相反的第二旋转方向产生第二旋转扭矩。例如,谐波驱动器86可被构造成:接收第一旋转扭矩t1-a(图4),该第一旋转扭矩具有第一旋转方向,该第一旋转方向围绕马达轴线ma(或某个其他轴线)为顺时针方向;以及生成第二旋转扭矩t2-a,该第二旋转扭矩具有第二旋转方向,该第二旋转方向围绕马达轴线ma(或另一个轴线)为逆时针方向。谐波驱动器86可被构造成:接收第一旋转扭矩t1-b,该第一旋转扭矩具有第一旋转方向,该第一旋转方向围绕马达轴线ma(或某个其他轴线)为逆时针方向;以及生成第二旋转扭矩t2-b,该第二旋转扭矩具有第二旋转方向,该第二旋转方向围绕马达轴线ma(或另一个轴线)为顺时针方向。
55.因此,谐波驱动器86被构造成当马达轴94沿第一轴方向r1或第二轴方向r2旋转时产生第二旋转扭矩,该第二旋转扭矩具有与第一旋转方向相反的第二旋转方向。在示例中,当马达轴94围绕马达轴线ma沿第一轴方向r1旋转时,第一旋转扭矩(例如,t1-a)的第一旋转方向与第一轴方向r1基本上相同,并且第二旋转扭矩(例如,t2-a)的第二旋转方向与第二轴方向r2基本上相同。在示例中,当马达轴94围绕马达轴线ma沿第二轴方向r2旋转时,第一旋转扭矩(例如,t1-b)的第一旋转方向与第二轴方向r2基本上相同,并且第二旋转扭矩(例如,t2-b)的第二旋转方向与第一轴方向r1基本上相同。
56.谐波驱动器86具有任何合适的构型。在一些示例中,如图3所示,谐波驱动器86包括谐波发生器106、柔性花键108和固定花键110(图3)。谐波发生器106被构造成当谐波发生器106从马达84接收第一旋转扭矩时围绕轴线(例如,马达轴线ma)旋转。固定花键110被构造成相对于致动器主体78和/或马达壳体92基本上静止。柔性花键108接合谐波发生器106和固定花键110两者。在示例中,柔性花键108定位在谐波发生器106与固定花键110之间。谐波驱动器86被构造成当谐波发生器106沿第一旋转方向(例如,从马达84)接收第一旋转扭矩时致使柔性花键108沿第二旋转方向产生第二旋转扭矩。
57.致动器组件74可被构造成致使齿轮组88响应于第二旋转扭矩而旋转。例如,谐波
驱动器86(例如,柔性花键108)可被构造成将第二旋转扭矩施加到齿轮组88以引起旋转。齿轮组88可包括一个或多个齿轮(例如,输入齿轮112和输出齿轮118),该一个或多个齿轮被构造成将旋转运动传递到线性致动器90,以致使线性致动器90使活塞82沿轴向方向a1平移(例如,以增加和/或引发盘叠堆58上的压缩力)或沿轴向方向a2平移(例如,以减少和/或基本上消除盘叠堆58上的压缩力)。
58.齿轮组88被构造成使得传递到线性致动器90的旋转运动的旋转方向取决于由谐波驱动器86施加的第二旋转扭矩的第二旋转方向。线性致动器90可被构造成使得从齿轮组88传递的旋转运动的旋转方向基本上确定线性致动器90使活塞82平移的线性方向(例如,轴向方向a1或轴向方向a2)。因此,致动器组件74可被构造成使得由线性致动器90生成的线性平移的方向取决于马达轴94的旋转方向。例如,当马达轴94沿一个方向(例如,第一轴方向r1或第二轴方向r2)旋转时,致动器组件74可被构造成使得线性致动器90使活塞82平移以增加和/或引发盘叠堆58上的压缩力;并且当马达轴94沿另一方向(例如,第一轴方向r1或第二轴方向r2中的另一者)旋转时,致动器组件74可被构造成使得线性致动器90使活塞82平移以减少和/或基本上消除盘叠堆58上的压缩力。
59.在一些示例中,谐波驱动器86(例如,柔性花键108)被构造成将第二旋转扭矩施加到齿轮组88的输入齿轮112,以引起输入齿轮112的旋转。在示例中,致动器组件74被构造成基于第二旋转扭矩的第二旋转方向引起输入齿轮112的旋转。例如,当谐波驱动器86产生第二旋转扭矩t2-a时,致动器组件74可被构造成引起输入齿轮112沿与第二旋转扭矩t2-a基本上相同的方向的旋转。当谐波驱动器86产生第二旋转扭矩t2-b时,致动器组件74可被构造成引起输入齿轮112沿与第二旋转扭矩t2-b基本上相同的方向的旋转。在一些示例中,致动器组件74被构造成引起输入齿轮112沿与马达轴94的旋转相反的方向的旋转。
60.在一些示例中,输入齿轮112围绕输入齿轮112的外周边116限定齿轮齿114(“输入齿轮齿114”)。例如,输入齿轮112可围绕包围输入齿轮112的齿轮轴线的节圆限定输入齿轮齿114。在一些示例中,输入齿轮112被构造成使得当将第二旋转扭矩被施加到输入齿轮112时,输入齿轮齿114基本上围绕马达轴线ma旋转。例如,输入齿轮112的齿轮轴线可与由马达84限定的马达轴线ma基本上平行或基本上重合。
61.齿轮组88进一步包括输出齿轮118。齿轮组88被构造成使得输入齿轮112的旋转引起输出齿轮118的对应旋转。在示例中,齿轮组88被构造成使得输入齿轮112的旋转方向基本上确定输出齿轮118的输出齿轮方向。因此,当马达轴94将第一旋转扭矩(例如,t1-a或t1-b)沿第一旋转方向施加到谐波驱动器86,并且谐波驱动器86使用第一旋转扭矩来将第二旋转扭矩(例如,t2-a或t2-b)沿第二旋转方向施加到输入齿轮112时,致动器组件74可被构造成使得输出齿轮118的输出齿轮方向取决于马达轴94的旋转方向。在示例中,致动器组件74被构造成使得马达轴94沿第一轴方向r1的旋转致使输出齿轮118沿第一输出齿轮方向(例如,输出齿轮方向r3(图4))旋转,并且马达轴94沿第二轴方向r2的旋转致使输出齿轮118沿与第一输出齿轮方向相反的第二输出齿轮方向(例如,输出齿轮方向r4(图4))旋转。输出齿轮118可被构造成将旋转运动沿第一输出齿轮方向或第二输出齿轮方向传递到线性致动器90。
62.在一些示例中,输出齿轮118围绕输出齿轮118的外周边122,例如围绕包围输出齿轮118的齿轮轴线的节圆限定齿轮齿120(“输出齿轮齿120”)。在示例中,并且如图3和图4所
描绘的,输出齿轮齿120被构造成与输入齿轮齿114啮合,使得输入齿轮齿114在输出齿轮齿120上施加扭矩,从而引起输出齿轮118围绕输出齿轮118的轴线的旋转。在示例中,致动器组件74被构造成使得输出齿轮118的齿轮轴线从输入齿轮112的齿轮轴线移位。在示例中,致动器组件74被构造成使得输出齿轮118的齿轮轴线基本上平行于输入齿轮112的齿轮轴线。致动器组件74可被构造成使得输出齿轮118的齿轮轴线基本上平行于由马达84限定的马达轴线ma(例如,平行或在制造公差允许的范围内接近平行)。
63.线性致动器90被构造成致使活塞82沿着压缩轴线ca基本上线性地平移。如图3所示,在一些示例中,压缩轴线ca例如沿y轴方向(如图所示)或沿一个或多个其他或另外的轴线从马达轴线ma移位。在示例中,如图3所示,齿轮组88被构造成将围绕马达轴线ma的旋转运动(例如,从柔性花键108)转换成围绕压缩轴线ca的旋转运动。在示例中,致动器组件74被构造成使得输入齿轮112围绕马达轴线ma旋转并且输出齿轮118围绕压缩轴线ca旋转。在一些示例中,致动器组件74被构造成使得马达84和/或谐波驱动器86沿x-y-z轴中的一者或多者(例如,y轴,如图3所示)从压缩轴线ca移位。致动器组件74可被构造成使得线性致动器90沿x-y-z轴中的一者或多者(例如,y轴,如图3所示)从马达轴线ma移位。因此,与直列式致动器相比,致动器组件74允许马达84、谐波驱动器86和/或线性致动器90的相对定位具有灵活性,该直列式致动器可被构造成使马达轴围绕马达轴线旋转并致使活塞在与马达轴线基本上重合的压缩轴线上平移。
64.线性致动器90被构造成从齿轮组88接收旋转运动并将旋转运动转换成基本上沿着压缩轴线ca的线性平移。在示例中,线性致动器90包括驱动器124,该驱动器被构造成从齿轮组88接收旋转运动。驱动器124可被构造成当驱动器124从齿轮组88接收旋转运动时旋转(例如,围绕压缩轴线ca)。线性致动器90可被构造成当驱动器124旋转时产生基本上沿着压缩轴线ca的线性平移。在示例中,输出齿轮118被构造成将旋转运动传递到驱动器124。驱动器124可被构造成当输出齿轮118将旋转运动沿第一输出齿轮方向传递到驱动器124时沿第一方向(“第一驱动器方向”)旋转,并且被构造成当输出齿轮118将旋转运动沿第二输出齿轮方向传递到驱动器124时沿与第一驱动器方向相反的第二方向(“第二驱动器方向”)旋转。
65.在一些示例中,输出齿轮118和驱动器124形成基本上刚性的主体(例如,形成基本上一体的部件),使得驱动器124和输出齿轮118沿相同的旋转方向旋转。例如,致动器组件74可被构造成使得当输出齿轮118围绕压缩轴线ca沿方向r3旋转时,驱动器124围绕压缩轴线ca沿方向r3旋转。致动器组件74可被构造成使得当输出齿轮118围绕压缩轴线ca沿方向r4旋转时,驱动器124围绕压缩轴线ca沿方向r4旋转。
66.致动器组件74具有被构造成致使活塞82沿轴向方向a1或a2平移的任何合适的构型。在一些示例中,致动器组件74包括螺杆126,该螺杆被构造成当驱动器124旋转时沿着压缩轴线ca线性地平移,其中螺杆126被构造成当螺杆126线性地平移时致使活塞82沿轴向方向a1或轴向方向a2平移。在示例中,螺杆126被构造成当驱动器124沿第一驱动器方向(例如,方向r3)旋转时,沿第一轴向方向a1线性地平移。螺杆126可被构造成当驱动器124沿第二驱动器方向(例如,方向r4)旋转时,沿第二轴向方向a2线性地平移。
67.螺杆126可被构造成当螺杆126使活塞82沿轴向方向a1线性地移位时致使活塞82增加和/或引发盘叠堆58上的压缩力。螺杆126可被构造成当螺杆126使活塞82沿轴向方向
a2线性地移位时使活塞82减小和/或消除盘叠堆58上的压缩力。螺杆126的线性平移的方向取决于驱动器124的驱动器方向和输出齿轮118的输出齿轮方向,该输出齿轮方向取决于由马达轴94确定的第二旋转扭矩(t2-a或t2-b)的第二旋转方向。因此,由螺杆126产生的线性平移的方向可取决于马达轴94的旋转方向。
68.因此,致动器组件74被构造成使用马达84以第一旋转速度生成第一旋转扭矩(t1-a或t2-b),使用谐波驱动器86以小于第一旋转速度的第二旋转速度生成第二旋转扭矩(t2-a或t2-b),并且使用线性致动器90将第二旋转扭矩转换成线性运动。线性致动器90可使活塞82沿取决于马达轴94的旋转方向的方向平移。在示例中,马达84被构造成围绕马达轴线ma生成第一旋转扭矩,并且线性致动器90被构造成沿着不同于马达轴线ma的压缩轴线ca产生线性运动。因此,与直列式致动器相比,致动器组件74允许马达84、谐波驱动器86和/或线性致动器90的相对定位具有灵活性,该直列式致动器可被构造成使马达轴围绕马达轴线旋转并致使活塞在与马达轴线基本上重合的压缩轴线上平移。
69.马达84被构造成接收电力(例如,从车载发电系统)并将电力转换成马达轴94相对于马达壳体92的旋转。马达84可被构造成接收ac(交流电)或dc(直流电)电力。马达84可包括转子和定子,并且可被构造成在定子上产生旋转场以在转子上生成扭矩。在一些示例中,马达84为无刷dc(bldc)马达,其被构造成接受dc电力输入并且通过电子换向在定子上生成旋转场。马达84可利用转子上的多个永磁体来响应于旋转定子场而提示转子扭矩。马达轴94可联接到转子,使得转子响应于转子扭矩的旋转引起马达轴94围绕马达轴线ma的旋转。在示例中,马达84是被构造成在转子上提供旋转场或换向场以便生成扭矩。
70.控制电路96被构造成基于例如来自输入装置102的输入来控制马达轴94的旋转方向。控制电路96可被构造成致使马达84使马达轴94沿第一轴方向r1或第二轴方向r2旋转。在示例中,控制电路96被构造成控制马达轴94围绕马达轴线ma的旋转速度。例如,控制电路96可被构造成基于来自输入装置102的输入来增加或减小马达轴94的旋转速度,以增加或减小活塞82在压缩轴线ca上的线性平移的速度。在一些示例中,控制电路96被构造成从传感器128接收信号,该传感器被构造成感测马达轴94的操作参数,诸如速度、位置和/或旋转方向。控制电路96可被构造成使用感测到的操作参数来维持或确定马达84的操作中所需的改变,以实现期望的制动操作。控制电路96可被构造成与运载工具上的其他控制系统(诸如防抱死制动系统(abs)、制动控制单元(bcu)或其他系统)通信。
71.图5示意性地描绘了包括谐波发生器106、柔性花键108和固定花键110的谐波驱动器86。图6a至图6d描绘了谐波驱动器86在谐波发生器106上接收第一旋转扭矩t1并且使用第一旋转扭矩t1在柔性花键108上产生第二旋转扭矩t2。在图6a至图6d中,当第二旋转扭矩t2为扭矩t2-a时,第一旋转扭矩t1可为扭矩t1-a(图4),或者当第二旋转扭矩t2为扭矩t2-b时,第一旋转扭矩t1可为扭矩t1-b。
72.马达轴94附接到谐波发生器106,使得马达轴94围绕马达轴线ma的旋转引起谐波发生器106围绕马达轴线ma的旋转。谐波发生器106围绕马达轴线ma限定基本上椭圆的(例如,椭圆或在制造公差允许的范围内接近椭圆的)周边p。固定花键110被构造成相对于致动器主体78保持基本上静止,并且包括围绕基本上圆形节圆的内部齿130。在示例中,谐波发生器106包括多个滚珠轴承132,该多个滚珠轴承包括滚珠轴承133和滚珠轴承134。柔性花键108定位在谐波发生器106与固定花键110之间,并且包括被构造成与内部齿130啮合的外
部齿136。
73.谐波驱动器86被构造成使得谐波发生器106和柔性花键108可异步旋转。例如,当马达轴94引起谐波发生器106围绕马达轴线ma的旋转时,谐波驱动器86可被构造成使得滚珠轴承132能够使谐波发生器106(和周边p)在谐波发生器106围绕马达轴线ma旋转时基本上在柔性花键108下方滑动。柔性花键108被构造成当谐波发生器106相对于柔性花键108异步旋转时弯曲以基本上符合周边p。谐波发生器106的周边p致使柔性花键108限定具有长轴ax1和短轴ax2的椭圆节圆,其中短轴ax2限定的长度小于长轴ax1。
74.谐波驱动器86被构造成使得当谐波发生器106的周边p围绕马达轴线ma旋转时,柔性花键108弯曲(例如,弹性地变形),使得长轴ax1和短轴ax2以与谐波发生器106相同的旋转速度旋转。当谐波发生器106在柔性花键108下方滑动时,柔性花键108变形为椭圆形状并限定椭圆节圆,从而致使外部齿136基本上沿着长轴ax1与内部齿130啮合。此外,椭圆节圆致使外部齿136基本上沿着短轴ax2从内部齿130脱离。因此,马达轴94围绕马达轴线ma的旋转致使谐波发生器106围绕马达轴线ma旋转,并且谐波发生器106致使柔性花键108弯曲,使得长轴ax1和短轴ax2与马达轴94和谐波发生器106同步旋转。柔性花键108弯曲(例如,弹性地变形)以致使外部齿136沿着长轴ax1与内部齿130啮合,并且当长轴ax1和短轴ax2旋转时,致使外部齿136沿着短轴ax2从内部齿130脱离。
75.柔性花键108被构造成沿与谐波发生器106的旋转方向相反的旋转方向围绕马达轴线ma旋转。在示例中,柔性花键108限定多个外部齿136,外部齿的数量少于由固定花键110限定的内部齿130的数量。在示例中,柔性花键108限定多个外部齿136,外部齿的数量比内部齿130的数量少至少两个(例如,两个、三个、四个或更多个)。与谐波发生器106相比,固定花键110的椭圆节圆与数量减少的外部齿136组合致使柔性花键108围绕马达轴线ma沿相反方向旋转。在示例中,当谐波发生器106(和长轴ax1)顺时针方向地旋转180度时,柔性花键108相对于固定花键110逆时针方向地旋转内部齿130的一个齿。对于谐波发生器106的每一次完整的顺时针方向旋转(360度),柔性花键108可相对于固定花键110逆时针方向地移动内部齿130的两个齿。因此,当马达轴94沿第一旋转方向在谐波发生器106上施加第一扭矩(t1-a或t1-b)时,谐波驱动器86被构造成致使柔性花键108沿与第一旋转方向相反的第二旋转方向产生第二扭矩(t2-a或t2-b)。
76.作为示例,图6a至图6d描绘了谐波驱动器86,其中马达轴94在谐波发生器106上施加第一扭矩t1。在图6a至图6d的示例中,第一扭矩t1引起谐波发生器106沿逆时针方向的旋转。相对于图6a,第一扭矩t1已致使谐波发生器106在图6b中逆时针方向地旋转90度,在图6c中逆时针方向地旋转180度,并且在图6d中逆时针方向地旋转270度。
77.在柔性花键108上描绘了固定点m。谐波驱动器86被构造成使得当谐波发生器106逆时针方向地旋转时,柔性花键108上的固定点m顺时针方向地旋转。例如,在图6b中,谐波发生器106的90度逆时针方向旋转已致使固定点m在由角度g1指示的角位移上顺时针方向地旋转。在图6c中,谐波发生器106的180度逆时针方向旋转已致使固定点m在由角度g2指示的角位移上顺时针方向地旋转,其中角度g2大于角度g1。在图6d中,谐波发生器106的270度逆时针方向旋转已致使固定点m在由角度g3指示的角位移上顺时针方向地旋转,其中角度g3大于角度g2。柔性花键108的旋转(引起固定点m的旋转)致使柔性花键108产生第二扭矩t2,该第二扭矩具有与第一扭矩t1相反的旋转方向。
78.此外,如图6a至图6d所示,谐波驱动器86提供从第一扭矩t1的第一旋转速度到第二扭矩t2的第二旋转速度的速度降低。在示例中,谐波驱动器86基于外部齿136的数量和内部齿130的数量产生从第一旋转速度到第二旋转速度的速度降低。在示例中,速度降低基本上等于外部齿136的数量除以内部齿130的数量与外部齿136的数量之间的差值。换句话说,速度降低可基本上等于n1/(n2-n1),其中n1为外部齿136的数量,并且n1为内部齿130的数量。
79.在一些示例中,柔性花键108基本上被构造成薄壁钢杯,其中外部齿136在靠近和/或邻近杯的开口端处(例如,在杯的“顶部”处)被机加工成外表面。柔性花键108可在杯的与开口端相对的端部处(例如,在杯的“底部”处)包括隔膜。柔性花键108被构造成将外部齿136和内部齿130接合生成的第二旋转扭矩传输到隔膜。在示例中,谐波驱动器86被构造成使用隔膜在齿轮组88(图3、图4)上施加第二旋转扭矩。在示例中,谐波驱动器86被构造成围绕马达轴线ma施加第二旋转扭矩。
80.输入齿轮112(图3)可被构造成从谐波驱动器86的隔膜接收第二旋转扭矩。输入齿轮112可围绕包围输入齿轮轴线的节圆限定输入齿轮齿114,使得围绕输入齿轮轴线的输入齿轮112上的扭矩致使输入齿轮齿114围绕输入齿轮轴线旋转。在示例中,输入齿轮轴线与马达轴线ma基本上平行或基本上同轴。在示例中,输入齿轮112被构造成从谐波驱动器86接收第二旋转扭矩并沿第二旋转扭矩的第二旋转方向围绕输入齿轮轴线旋转。输入齿轮112可被构造成当马达轴94沿第一旋转方向旋转时沿第二旋转方向旋转。在示例中,致动器组件74被构造成使得马达轴94围绕马达轴线ma沿第一轴方向的旋转引起输入齿轮112沿与第一轴方向相反的第二轴方向的旋转,并且使得轴94围绕马达轴线ma沿第二轴方向的旋转引起输入齿轮112沿第一轴方向的旋转。
81.齿轮组88被构造成使得输入齿轮112的旋转引起输出齿轮118的旋转。在示例中,输出齿轮118围绕包围输出齿轮轴线的节圆限定输出齿轮齿120,使得输出齿轮118围绕输出齿轮轴线的旋转致使输出齿轮齿120围绕输出齿轮轴线旋转。在示例中,输出齿轮118的输出齿轮轴线从输入齿轮112的输入齿轮轴线移位(例如,不同于该输入齿轮轴线)。因此,齿轮组88可被构造成接收第二旋转扭矩以引起输入齿轮112围绕输入齿轮轴线的旋转,并且将第二旋转扭矩的至少某部分传递到输出齿轮118以引起输出齿轮118围绕不同于输入齿轮轴线的输出齿轮轴线的旋转。在示例中,输入齿轮轴线与马达轴线ma基本上对准(例如,基本上同轴)。在示例中,输出齿轮轴线与压缩轴线ca基本上对准(例如,基本上重合)。因此,齿轮组88可被构造成基本上将扭矩从马达轴线ma传递到压缩轴线ca,以与其中单个轴线与马达轴线ma和压缩轴线ca两者基本上重合的直列式致动器相比,允许更紧凑的致动器组件。
82.在示例中,齿轮组88被构造成使得输入齿轮齿114与输出齿轮齿120啮合以引起输出齿轮118的旋转。在一些示例中,齿轮组88被构造成使得输入齿轮112驱动输出齿轮118的旋转,而无需在输入齿轮112与输出齿轮118之间使用一个或多个惰轮。齿轮组88可被构造成使得输入齿轮112的旋转速度大于输出齿轮118的旋转速度。在示例中,输入齿轮112限定多个输入齿轮齿114并且输出齿轮118限定多个输出齿轮齿120,并且输入齿轮齿114的数量小于输出齿轮齿120的数量。齿轮组88可被构造成使得输出齿轮118的旋转速度从输入齿轮112的旋转速度降低的因子基本上等于输入齿轮齿114的数量除以输出齿轮齿120的数量。
换句话说,从输入齿轮112到输出齿轮118的速度降低可基本上等于n3/n4,其中n3为输入齿轮齿114的数量,并且n4为输出齿轮齿120的数量。
83.因此,致动器组件74可被构造成使得当马达84以第一旋转速度生成第一扭矩(例如,t1-a或t1-b)时,谐波驱动器86可通过使用第一扭矩以小于第一旋转速度的第二旋转速度产生第二扭矩来引起第一速度降低。第一速度降低可基本上等于n1/(n2-n1),其中n1为外部齿136的数量,并且n1为内部齿130的数量。致动器组件74可被构造成使得当齿轮组88以第二旋转速度接收第二旋转扭矩时,当齿轮组88使用第二旋转扭矩以产生输出齿轮118的旋转时,齿轮组88引起第二速度降低。第二速度降低可基本上等于n3/n4,其中n3为输入齿轮齿114的数量,并且n4为输出齿轮齿120的数量。
84.在示例中,致动器组件74可被构造成使得第一速度降低和第二速度降低引起至少80:1的总体速度降低,并且在一些示例中为至少150:1。此外,致动器组件74可被构造成在输入齿轮112和输出齿轮118之间不使用一个或多个惰轮的情况下引起总体速度降低,从而在马达轴94的速度和/或旋转方向改变期间减少和/或消除齿轮齿隙。此外,与被构造成主要使用啮合的齿轮箱实现逐步降低的致动器相比,在不使用惰轮的情况下使用谐波驱动器86和齿轮组88实现速度降低可允许更紧凑的致动器组件。
85.齿轮组88被构造成使得输入齿轮112的旋转方向基本上确定输出齿轮118的输出齿轮方向。致动器组件74被构造成使得马达轴94的旋转方向(例如,第一轴方向r1或第二轴方向r2)基本上确定输入齿轮112的旋转方向。因此,致动器组件74被构造成使得马达轴94的旋转方向确定输出齿轮118的输出齿轮方向。在示例中,马达轴94沿第一轴方向r1的旋转致使输出齿轮118沿第一输出齿轮方向(例如,输出齿轮方向r3(图4))旋转,并且马达轴94沿第二轴方向r2的旋转致使输出齿轮118沿与第一输出齿轮方向相反的第二输出齿轮方向(例如,输出齿轮方向r4(图4))旋转。
86.输出齿轮118被构造成将旋转运动沿第一输出齿轮方向或第二输出齿轮方向传递到线性致动器90。在示例中,输出齿轮118被构造成致使线性致动器90的一部分(例如,驱动器124)围绕压缩轴线ca旋转。线性致动器90被构造成从输出齿轮118(沿第一输出齿轮方向或第二输出齿轮方向)接收旋转运动并将旋转运动转换成基本上沿着压缩轴线ca的线性平移。在示例中,当驱动器124基本上围绕压缩轴线ca旋转时,线性致动器90被构造成产生基本上沿着压缩轴线ca的线性平移。在示例中,驱动器124被构造成当输出齿轮118将旋转运动沿第一输出齿轮方向传递到驱动器124时沿第一驱动器方向旋转,并且被构造成当输出齿轮118将旋转运动沿第二输出齿轮方向传递到驱动器124时沿与第一驱动器方向相反的第二驱动器方向旋转。
87.在示例中,螺杆126被构造成当驱动器124围绕压缩轴线ca旋转时,沿着压缩轴线ca线性地平移。线性致动器可被构造成使得当驱动器124沿第一驱动器方向旋转时,螺杆126沿轴向方向a1平移,并且使得当驱动器124沿第二驱动器方向旋转时,螺杆126沿轴向方向a2平移。因此,致动器组件74可被构造成使得马达轴94的旋转方向确定驱动器124围绕压缩轴线ca的旋转方向,并且由此确定螺杆126的平移方向。例如,在一些示例中,当马达84致使马达轴94沿第一轴方向r1旋转时,驱动器124致使螺杆126沿方向a1线性地平移以增加和/或引发盘叠堆58上的压缩力,并且当马达84致使马达轴94沿第二轴方向r2旋转时,驱动器124致使螺杆126沿方向a2线性地平移以减小和/或基本上消除盘叠堆58上的压缩力。在
其他示例中,当马达84致使马达轴94沿第二轴方向r2旋转时,驱动器124致使螺杆126沿方向a1线性地平移以增加和/或引发盘叠堆58上的压缩力,并且当马达84致使马达轴94沿第一轴方向r1旋转时,驱动器124致使螺杆126沿方向a2线性地平移以减小和/或基本上消除盘叠堆58上的压缩力。
88.在示例中,驱动器124为滚珠螺母,并且螺杆126为滚珠螺杆。线性致动器90可包括多个滚珠轴承138(“致动器滚珠轴承138”),诸如滚珠轴承139和滚珠轴承140(图3)。在这些示例中的一些示例中,线性致动器90被构造成使得驱动器124围绕压缩轴线ca的旋转在致动器滚珠轴承138上沿方向a1或方向a2施加力,并且致动器滚珠轴承138将该力传输到螺杆126,从而致使螺杆126分别沿方向a1或a2平移。在示例中,如图3所示,驱动器124限定包围压缩轴线ca的螺旋状轨道142(“驱动器螺旋状轨道142”),并且螺杆126限定包围压缩轴线ca的螺旋状轨道144(“螺杆螺旋状轨道144”),并且线性致动器90被构造成将致动器滚珠轴承138的至少一部分或全部限制在驱动器螺旋状轨道142和螺杆螺旋状轨道144内。在示例中,驱动器124被构造成使用驱动器螺旋状轨道142在致动器滚珠轴承138上施加力,并且致动器滚珠轴承138被构造成使用螺杆螺旋状轨道144将该力传输到螺杆126。在示例中,线性致动器90包括回球器146,该回球器被构造成允许致动器滚珠轴承138在螺杆126沿方向a1或方向a2平移时从驱动器螺旋状轨道142和螺杆螺旋状轨道144退出和返回到驱动器螺旋状轨道和螺杆螺旋状轨道。
89.致动器组件74可包括抗旋转构件148(图3),该抗旋转构件被构造成限制螺杆126相对于致动器主体78、马达壳体92或制动器组件40的某个其他部分(例如,扭矩管52)的旋转移动。抗旋转构件148可被构造成允许螺杆126沿线性方向(例如,方向a1或方向a2)平移,同时限制螺杆126的旋转移动。在示例中,抗旋转构件148被构造成致使螺杆126基本上抵抗在驱动器124旋转期间由输出齿轮118施加到螺杆126的扭矩。在示例中,抗旋转构件148被构造成相对于致动器主体78保持基本上静止。致动器主体78可机械地支撑抗旋转构件148,使得抗旋转构件148致使螺杆126抵抗由驱动器124施加的扭矩。
90.抗旋转构件148可包括线性轴承150,该线性轴承被构造成接合螺杆126以使螺杆126相对于驱动器124基本上保持旋转静止。线性轴承150可被构造成使得当螺杆126在线性轴承150上围绕压缩轴线ca施加扭矩时,线性轴承150在螺杆126上施加基本上相等且相反的反作用扭矩,以防止螺杆126围绕压缩轴线ca的旋转。线性轴承150可被构造成沿线性方向(例如,方向a1或方向a2)平移,同时限制螺杆126的旋转移动。在示例中,线性轴承150包括多个滚珠轴承152(“线性滚珠轴承152”),诸如滚珠轴承153和滚珠轴承154。在示例中,线性轴承150被构造成使得如果驱动器124围绕压缩轴线ca的旋转向螺杆126施加扭矩,则线性滚珠轴承152将该扭矩传输到抗旋转构件148,从而致使线性轴承150在螺杆126上施加基本上相等且相反的反作用扭矩。
91.线性轴承150被构造成允许螺杆126相对于抗旋转构件148沿线性方向(例如,方向a1或方向a2)平移。例如,当驱动器124相对于螺杆126旋转以引起螺杆126的线性运动时,线性轴承150可被构造成对线性运动提供有限的阻力或基本上不提供阻力,同时基本上抵抗可能由驱动器124施加到螺杆126的扭矩引起的螺杆126的任何旋转运动。在示例中,抗旋转构件148限定线性轨道156,并且螺杆126限定线性轨道158(“螺杆线性轨道158”),并且抗旋转构件148被构造成将线性滚珠轴承152限制在线性轨道156和螺杆线性轨道158内。在示例
中,线性轨道156和螺杆线性轨道158被构造成为线性滚珠轴承152限定基本上平行于压缩轴线ca的路径。在示例中,致动器组件74被构造成使得当驱动器124在螺杆126上围绕压缩轴线ca施加扭矩时,螺杆线性轨道158经由线性滚珠轴承152和线性轨道156将该扭矩传输到抗旋转构件148,并且抗旋转构件148经由线性轨道156和线性滚珠轴承152向螺杆126施加基本上相等且相反的反作用力,以基本上限制螺杆126的旋转运动。
92.在示例中,螺杆126限定空隙129并且可被构造成使得抗旋转构件148定位在空隙129内。在示例中,驱动器124或抗旋转构件148中的一者定位在空隙129内(例如,基本上定位在螺杆126内),并且驱动器124或抗旋转构件148中的另一者定位在空隙129之外(例如,基本上定位在螺杆126之外)。例如,在图3的示例中,抗旋转构件148定位在空隙129内,并且驱动器124定位在空隙129之外。螺杆126可包括限定空隙129的基本上管状区段。活塞82可由螺杆126支撑在基本上管状区段的端部上。
93.螺杆126包括内表面160(“螺杆内表面160”),该内表面限定空隙129的边界。抗旋转构件148包括外表面162(“抗旋转外表面162”),该外表面被构造成当抗旋转构件148定位在空隙129中时面向螺杆内表面160。在示例中,抗旋转外表面162限定线性轨道156,并且螺杆内表面160限定螺杆线性轨道158。在图3的示例中并且在其他示例中,驱动器124可被构造成基本上包围螺杆126的一部分,使得驱动器124定位在空隙129之外。驱动器124可包括内表面164(“驱动器内表面164”),该内表面被构造成当驱动器124基本上包围螺杆126的该部分时面向螺杆126。在示例中,螺杆126包括外表面166(“螺杆外表面166”),该外表面被构造成当驱动器124基本上包围螺杆126的该部分时面向驱动器内表面164。在示例中,驱动器内表面164限定驱动器螺旋状轨道142,并且螺杆外表面166限定螺杆螺旋状轨道144。
94.图7是包括致动器主体79、线性致动器91和抗旋转构件149的另一示例致动器组件75的概念图。线性致动器91包括驱动器125和螺杆127并且限定空隙131。线性致动器91被构造成使得驱动器125定位在空隙131内,并且抗旋转构件149定位在空隙131之外(例如,部分和/或基本上包围螺杆127)。图7参考所示的x-y-z轴,以横截面和功能框图的形式示出了致动器组件75的一部分。致动器组件75可为致动器组件73、74的示例,致动器主体79可为致动器主体77、78的示例,线性致动器91可为线性致动器90的示例,驱动器125可为驱动器124的示例,螺杆127可为螺杆126的示例,并且抗旋转构件149可为抗旋转构件148的示例(图2)。致动器组件75进一步包括马达84、马达轴94、谐波驱动器86、输入齿轮112、输出齿轮118、控制电路96和输入装置102。
95.输出齿轮118被构造成当输出齿轮118旋转时使驱动器125在空隙131内旋转。驱动器125被构造成基本上在由螺杆127限定的空隙131内旋转,以引起螺杆127沿轴向方向a1或轴向方向a2的线性平移。线性致动器91包括抗旋转构件149,该抗旋转构件包围螺杆127并且被构造成在驱动器125围绕螺杆127旋转时限制螺杆127的旋转移动。在示例中,输出齿轮118被构造成致使驱动器125在空隙131内围绕压缩轴线ca旋转。螺杆127可包括限定空隙131的基本上管状区段。活塞82可由螺杆127支撑在基本上管状区段的端部上。在示例中,输出齿轮118被构造成当输出齿轮118沿第一输出齿轮方向旋转时致使驱动器125沿第一驱动器方向旋转,并且被构造成当输出齿轮118沿第二输出齿轮方向旋转时致使驱动器125沿第二驱动器方向旋转。
96.螺杆127被构造成当驱动器125围绕压缩轴线ca旋转时沿着压缩轴线ca线性地平
移。线性致动器91可被构造成使得当驱动器125沿第一驱动器方向旋转时,螺杆127沿轴向方向a1平移,并且使得当驱动器125沿第二驱动器方向旋转时,螺杆127沿轴向方向a2平移。因此,致动器组件75可被构造成使得马达轴94的旋转方向确定驱动器125围绕压缩轴线ca的旋转方向,并且由此确定螺杆127的平移方向。
97.在一些示例中,驱动器125为滚珠螺母,并且螺杆127为滚珠螺杆。线性致动器91可被构造成使得驱动器125围绕压缩轴线ca的旋转在致动器滚珠轴承138上沿方向a1或方向a2施加力,并且致动器滚珠轴承138将该力传输到螺杆127,从而致使螺杆127分别沿方向a1或a2平移。在示例中,如图7所示,驱动器125限定包围压缩轴线ca的螺旋状轨道143(“驱动器螺旋状轨道143”),并且螺杆127限定包围压缩轴线ca的螺旋状轨道145(“螺杆螺旋状轨道145”),并且线性致动器91被构造成将致动器滚珠轴承138的至少一部分或全部限制在驱动器螺旋状轨道143和螺杆螺旋状轨道145内。驱动器125可被构造成使用驱动器螺旋状轨道143在致动器滚珠轴承138上施加力,并且致动器滚珠轴承138被构造成使用螺杆螺旋状轨道145将该力传输到螺杆127。在示例中,线性致动器91包括回球器147,该回球器被构造成允许致动器滚珠轴承138在螺杆127沿方向a1或方向a2平移时从驱动器螺旋状轨道143和螺杆螺旋状轨道145退出和返回到驱动器螺旋状轨道和螺杆螺旋状轨道。
98.螺杆127包括内表面161(“螺杆内表面161”),该内表面限定空隙131的边界。在示例中,螺杆内表面161限定螺杆螺旋状轨道145。驱动器125可包括外表面169(“驱动外表面169”),该外表面被构造成当螺杆127基本上驱动器125时面向螺杆127。在示例中,驱动外表面169限定驱动器螺旋状轨道143。
99.抗旋转构件149被构造成限制螺杆127相对于致动器主体79、马达壳体92或制动器组件40的某个其他部分(例如,扭矩管52)的旋转移动。抗旋转构件149可被构造成允许螺杆127沿线性方向(例如,方向a1或方向a2)平移,同时限制螺杆127的旋转移动。抗旋转构件149可被构造成致使螺杆127基本上抵抗在驱动器125旋转期间由输出齿轮118施加到螺杆127的扭矩。在示例中,抗旋转构件149被构造成相对于致动器主体79保持基本上静止。致动器主体79可机械地支撑抗旋转构件149,使得抗旋转构件149致使螺杆127抵抗由驱动器125施加的扭矩。
100.抗旋转构件149可包括线性轴承151,该线性轴承被构造成接合螺杆126以使螺杆126相对于驱动器124基本上保持旋转静止。线性轴承151可被构造成使得当螺杆127在线性轴承151上围绕压缩轴线ca施加扭矩时,线性轴承151在螺杆127上施加基本上相等且相反的反作用扭矩,以防止螺杆127围绕压缩轴线ca的旋转。线性轴承151可被构造成沿线性方向(例如,方向a1或方向a2)平移,同时限制螺杆127的旋转移动。线性轴承151可包括线性滚珠轴承152,其中线性轴承151被构造成使得如果驱动器125围绕压缩轴线ca的旋转向螺杆127施加扭矩,则线性滚珠轴承152将该扭矩传输到抗旋转构件149,从而致使线性轴承151在螺杆127上施加基本上相等且相反的反作用扭矩。
101.线性轴承151被构造成允许螺杆127相对于抗旋转构件149沿线性方向(例如,方向a1或方向a2)平移。例如,当驱动器125相对于螺杆127旋转以引起螺杆127的线性运动时,线性轴承151可被构造成对线性运动提供有限的阻力或基本上不提供阻力,同时基本上抵抗可能由驱动器125施加到螺杆127的扭矩引起的螺杆127的任何旋转运动。在示例中,抗旋转构件149限定线性轨道157,并且螺杆127限定线性轨道159(“螺杆线性轨道159”),并且抗旋
转构件149被构造成将线性滚珠轴承152限制在线性轨道157和螺杆线性轨道159内。在示例中,线性轨道157和螺杆线性轨道159被构造成为线性滚珠轴承152限定基本上平行于压缩轴线ca的路径。在示例中,致动器组件75被构造成使得当驱动器124在螺杆127上围绕压缩轴线ca施加扭矩时,螺杆线性轨道159经由线性滚珠轴承152和线性轨道157将该扭矩传输到抗旋转构件149,并且抗旋转构件149经由线性轨道157和线性滚珠轴承152向螺杆127施加基本上相等且相反的反作用扭矩,以基本上限制螺杆127的旋转运动。
102.抗旋转构件148可包括内表面170(“抗旋转内表面170”),该内表面被构造成当抗旋转构件149定位在空隙131中时面向螺杆127的外表面167(“螺杆外表面167”)。在示例中,抗旋转内表面170限定线性轨道157,并且螺杆外表面167限定螺杆线性轨道159。
103.制动器组件40可包括任何合适数量的致动器,诸如致动器组件73、74和/或75,该致动器被构造成施加和/或增加盘叠堆58上的压缩力,和/或被构造成减少和/或消除盘叠堆58上的压缩力。致动器可以任何合适的布置布置在制动器组件40内。在示例中,制动器组件40包括多个致动器,该多个致动器围绕包围车轮轴线a的周边布置。两个或更多个致动器可被构造成基于由控制电路96向两个或更多个致动器发出的命令来使相应活塞基本上同时平移,和/或可被构造成基于由控制电路96向单独致动器发出的单独命令来使相应活塞基本上单独地平移。
104.致动器组件74、车轮10、制动器组件40及其部件可使用任何合适的技术形成。致动器组件74、车轮10、制动器组件40及其部件可由棒料锻造、铸造、制造,被增材制造(例如,三维(3d)打印)、挤出、拉伸或使用其他合适的方法来生产。在一些示例中,致动器组件74、车轮10、制动器组件40及其部件可被机加工以限定本文所述的构型。在其他示例中,致动器组件74、车轮10、制动器组件40及其部件可在基本上无需机加工的情况下形成。
105.在一些示例中,车轮10可从近网形锻铝进行精加工,并且包含轴向组件和/或车轮轮辋来用于将制动器组件40和/或致动器组件74组装到车轮10上。在其他示例中,可能以不同的方式来制造车轮10。在又一些其他示例中,可以获得而不是制造车轮10。车轮10可以由任何合适的材料制成。在一些示例中,车轮10包括金属或金属合金。例如,车轮10可以包括铝、镍合金、钢合金(例如,不锈钢)、钛、碳复合材料或镁。
106.控制电路96可包括处理器、存储器和(在一些示例中)输入/输出(i/o)外围设备。在示例中,控制电路96可包括以下任何一者或多者:微控制器(mcu)(例如单个集成电路上的计算机,该单个集成电路包含处理器内核、存储器和可编程输入/输出外围设备)、微处理器(μp)(例如单个集成电路(ic)上的中央处理单元(cpu))、数字信号处理器(dsp)、专用集成电路(asic)、现场可编程门阵列(fpga)、片上系统(soc)或等效的离散或集成逻辑电路。控制电路96可包括集成电路,即,集成控制电路,并且集成控制电路可被实现为固定硬件处理电路、可编程处理电路和/或固定处理电路和可编程处理电路两者的组合。存储器可包括任何易失性或非易失性介质,诸如随机存取存储器(ram)、只读存储器(rom)、非易失性ram(nvram)、电可擦除可编程rom(eeprom)、闪速存储器等。此外,在一些示例中,存储器或另一个存储器还可存储用于使本文所述的一个或多个控制器执行归属于它们的动作的可执行指令。
107.输入装置102可具有任何合适的构型。例如,输入装置102可包括脚踏开关、按钮或小键盘、被构造成从用户接收语音命令的扬声器、显示器(诸如液晶(lcd)、发光二极管
(led)或有机发光二极管(oled))。在一些示例中,输入装置102可包括触摸屏。输入装置102被构造成接收用户输入(例如以使脚踏开关置于特定位置和/或按住小键盘上的一个或多个按钮的形式或经由触摸屏),该用户输入可为选择一个或多个致动器来致动的用户输入。在一些示例中,输入装置102还被构造成显示信息,诸如提供关于制动器组件40的致动的信息的一个或多个指示。
108.通信链路98、104可为硬线和/或无线通信链路。在一些示例中,通信链路98、104可包括控制电路96的某部分。在一些示例中,通信链路98、104包括有线连接、无线互联网连接、直接无线连接(诸如无线lan)、bluetooth
tm
、wi-fi
tm
和/或红外连接。通信链路98、104可利用任何无线或远程通信协议。
109.本文所述的制动盘(包括转子盘60、61、62、63和定子盘64、65、66)可由任何合适的材料制造。在一些示例中,本文所述的制动盘可由金属或金属合金(诸如钢合金)制造。在一些示例中,制动盘可使用陶瓷材料(诸如陶瓷复合材料)制造。在一些示例中,制动盘可由碳-碳复合材料制造。在一些示例中,制动盘可使用具有高热稳定性、高耐磨性和/或稳定摩擦特性的碳-碳复合材料制造。制动盘可包括具有多根碳纤维和致密材料的碳材料。碳纤维可作为单层或多层结构布置在织造物或非织造物中。
110.图8是示出对制动器组件中的盘叠堆进行压缩的示例性技术的流程图。尽管该技术参考本文所述的制动器组件40和车轮10进行描述,但该技术可与本文所述的其他示例性部件一起使用。
111.该技术包括使用致动器组件73、74、75的马达84生成第一旋转扭矩(例如,t1-a、t1-b)(180)。致动器组件73、74、75可包括致动器主体77、78、79,该致动器主体被构造成相对于制动器组件40的某部分(诸如扭矩管52)保持基本上静止。马达84可包括马达壳体92,该马达壳体被构造成相对于致动器主体77、78、79保持基本上静止。马达84可被构造成通过使马达轴94相对于马达壳体92旋转来生成第一旋转扭矩。在示例中,致动器组件73、74、75被构造成响应于从控制电路96所接收的制动信号而生成第一旋转扭矩。控制电路96可被构造成从输入装置102接收用户输入并且基于用户输入将制动信号传输到致动器组件73、74、75。
112.该技术可包括以第一旋转速度并沿第一旋转方向生成第一旋转扭矩。在示例中,马达壳体92限定马达轴线ma,并且马达84被构造成围绕马达轴线ma生成第一旋转扭矩。马达壳体92可被构造成使马达轴94围绕马达轴线ma旋转以生成第一旋转扭矩。马达84可被构造成使马达轴94围绕马达轴线ma沿第一轴方向r1或沿与第一轴方向r1相反的第二轴方向r2旋转以生成第一旋转扭矩。
113.该技术包括使用谐波驱动器86生成第二旋转扭矩(182)。谐波驱动器86可被构造成使用由马达84产生的第一旋转扭矩来生成第二旋转扭矩。谐波驱动器86可以小于第一旋转速度的第二旋转速度并沿与第一旋转方向相反的第二旋转方向生成第二旋转扭矩。
114.在示例中,谐波驱动器86包括谐波发生器106、限定外部齿136的柔性花键108和限定内部齿130的固定花键110。固定花键110可限定基本上圆形节圆并且可被构造成相对于致动器主体78、马达壳体92和/或制动器组件40的另一部分(诸如扭矩管52)保持基本上静止。谐波发生器106可被构造成致使柔性花键108限定椭圆节圆。该技术可包括使用第一旋转扭矩来引起谐波发生器106的旋转。该技术可包括在谐波发生器106旋转时致使外部齿
136基本上在椭圆节圆的长轴处与内部齿130啮合。该技术可包括使用柔性花键108生成第二旋转扭矩。柔性花键108可被构造成围绕马达轴线ma生成第二旋转扭矩。在示例中,该技术包括使用谐波驱动器来使用第一旋转速度的第一旋转扭矩生成第二旋转速度的第二旋转扭矩,其中第二旋转速度小于第一旋转速度。
115.该技术可包括使用第二旋转扭矩旋转齿轮组88的输出齿轮118。在示例中,谐波驱动器86被构造成引起输入齿轮112的旋转以引起输出齿轮118的旋转。输入齿轮112可限定输入齿轮齿114,并且输出齿轮118可限定输出齿轮齿120。在示例中,输入齿轮112被构造成使输入齿轮齿114与输出齿轮齿120啮合。在示例中,齿轮组88被构造成使输入齿轮112围绕输入齿轮轴线旋转并且使输出齿轮118围绕输出齿轮轴线旋转,该输出齿轮轴线从输入齿轮轴线移位(例如,不同于输入齿轮轴线)。
116.该技术包括使用第二旋转扭矩平移活塞82(184)。该技术可包括致使线性致动器90、91生成线性运动以使用第二旋转扭矩平移活塞82。在示例中,输出齿轮118被构造成当第二旋转扭矩引起输出齿轮118的旋转时引起驱动器124的旋转。线性致动器90、91可包括螺杆126、127,该螺杆被构造成当驱动器124、125旋转时线性地平移。在示例中,螺杆126、127被构造成沿着压缩轴线ca线性地平移。压缩轴线ca可与输出齿轮118的输出齿轮轴线基本上重合。在一些示例中,驱动器124被构造成基本上围绕螺杆126的一部分旋转以引起线性平移。在一些示例中,驱动器125可被构造成在由螺杆127限定的空隙131内旋转以引起线性平移。
117.在示例中,该技术包括当马达84使马达轴94沿第一轴方向r1旋转时致使螺杆126、127引发和/或增加盘叠堆58上的压缩力。致动器组件73、74、75可被构造成当马达84使马达轴94沿第一轴方向r1旋转时致使输出齿轮118沿第一输出齿轮方向围绕输出齿轮轴线旋转。致动器可被构造成当输出齿轮118沿第一输出齿轮方向旋转时致使驱动器124、125沿第一驱动器方向旋转。驱动器124、125可被构造成当驱动器124、125沿第一驱动器方向旋转时致使螺杆126沿第一轴向方向a1平移以引发和/或增加盘叠堆58上的压缩。在示例中,该技术包括当马达84使马达轴94沿第二轴方向r2旋转时致使螺杆126、127减小和/或基本上消除盘叠堆58上的压缩力。致动器组件73、74、75可被构造成当马达84使马达轴94沿第二轴方向r2旋转时致使输出齿轮118沿与第一输出齿轮方向相反的第二输出齿轮方向旋转。致动器可被构造成当输出齿轮118沿第二输出齿轮方向旋转时致使驱动器124、125沿与第一驱动器方向相反的第二驱动器方向旋转。驱动器124、125可被构造成当驱动器124、125沿第二驱动器方向旋转时致使螺杆126、127沿第二轴向方向a2平移以减小和/或基本上消除盘叠堆58上的压缩。
118.本公开包括以下实施例。
119.实施例1:一种制动器组件,该制动器组件包括:制动盘叠堆;致动器组件,该致动器组件包括:电动马达,该电动马达被构造成围绕马达轴线生成第一旋转扭矩;谐波驱动器,该谐波驱动器被构造成响应于第一旋转扭矩而生成第二旋转扭矩;齿轮组,该齿轮组包括输出齿轮,该输出齿轮被构造成响应于第二旋转扭矩而旋转;和线性致动器,该线性致动器与齿轮组机械地联接,其中该线性致动器被构造成沿着压缩轴线生成线性运动并且在输出齿轮旋转时致使活塞压缩制动盘叠堆,其中压缩轴线不同于马达轴线。
120.实施例2:根据实施例1所述的制动器组件,其中该电动马达被构造成以第一旋转
速度并沿第一旋转方向生成第一旋转扭矩,并且其中该谐波驱动器被构造成以第二旋转速度并沿第二旋转方向生成第二旋转扭矩,其中第二旋转速度小于第一旋转速度并且第二旋转方向与第一旋转方向相反。
121.实施例3:根据实施例1或2所述的制动器组件,其中该输出齿轮被构造成引起线性致动器的旋转,并且其中该线性致动器被构造成当输出齿轮引起旋转时生成线性运动。
122.实施例4:根据实施例1至3中任一项所述的制动器组件,其中该线性致动器包括螺杆和驱动器,该螺杆被构造成平移,该驱动器被构造成围绕螺杆旋转,其中驱动器的旋转致使螺杆沿着压缩轴线生成线性运动。
123.实施例5:根据实施例4所述的制动器组件,其中该线性致动器包括多个滚珠轴承,其中该驱动器被构造成致使滚珠轴承在螺杆上施加力以致使螺杆沿着压缩轴线生成线性运动。
124.实施例6:根据实施例1至5中任一项所述的制动器组件,其中该齿轮组包括输入齿轮,该输入齿轮被构造成围绕马达轴线旋转,其中该谐波驱动器被构造成引起输入齿轮的旋转,并且其中该输出齿轮被构造成当输入齿轮围绕马达轴线旋转时围绕压缩轴线旋转。
125.实施例7:根据实施例6所述的制动器组件,其中输出齿轮与输入齿轮啮合。
126.实施例8:根据实施例6或7所述的制动器组件,其中线性致动器的一部分被构造成与输出齿轮同步旋转。
127.实施例9:根据实施例1至8中任一项所述的制动器组件,其中该谐波驱动器包括限定内部齿的固定花键和限定外部齿的柔性花键,其中该柔性花键被构造成使外部齿与内部齿啮合以生成第二旋转扭矩。
128.实施例10:根据实施例1至9中任一项所述的制动器组件,其中该谐波驱动器包括谐波发生器和柔性花键,其中电动马达被构造成使用第一旋转扭矩引起谐波发生器的旋转,并且其中该谐波发生器被构造成致使柔性花键限定长轴长于短轴的椭圆节圆。
129.实施例11:根据实施例1至10中任一项所述的制动器组件,其中该线性致动器被构造成当线性致动器沿着压缩轴线生成线性运动时,防止活塞围绕压缩轴线的旋转。
130.实施例12:根据实施例1至11中任一项所述的制动器组件,其中:该谐波驱动器包括柔性花键并且被构造成使用柔性花键生成第二旋转扭矩,该齿轮组包括与输出齿轮啮合的输入齿轮,该输入齿轮被构造成与柔性花键同步旋转,并且该线性致动器包括驱动器,该驱动器被构造成与输出齿轮同步旋转以致使线性致动器的螺杆沿着压缩轴线生成线性运动。
131.实施例13:根据实施例1至12中任一项所述的制动器组件,其中:电动马达包括马达壳体和马达轴,并且电动马达被构造成通过至少使马达轴相对于马达壳体旋转而生成第一旋转扭矩,并且谐波驱动器包括:谐波发生器,其中马达轴被构造成致使谐波发生器与马达轴同步旋转;固定花键,该固定花键被构造成相对于马达壳体保持基本上静止并且限定围绕基本上圆形节圆的内部齿轮齿;和柔性花键,该柔性花键在谐波发生器与固定花键之间,其中:谐波发生器被构造成致使柔性花键限定长轴长于短轴的基本上椭圆节圆,该柔性花键限定椭圆节圆上方的外部齿轮齿,并且该柔性花键被构造成致使外部齿轮齿与固定花键的内部齿轮齿啮合以致使柔性花键生成第二旋转扭矩。
132.实施例14:根据实施例1至13中任一项所述的制动器组件,该制动器组件进一步包
括扭矩管,其中该盘叠堆包括一个或多个转子盘和一个或多个定子盘,该一个或多个转子盘被构造成围绕扭矩管旋转,该一个或多个定子盘被构造成相对于扭矩管保持旋转静止,并且其中该活塞被构造成在活塞压缩盘叠堆时致使一个或多个转子盘和一个或多个定子盘在扭矩管上方平移。
133.实施例15:一种制动器组件,该制动器组件包括:盘叠堆;活塞,该活塞被构造成压缩盘叠堆;电动马达,该电动马达包括马达壳体和马达轴,其中该电动马达被构造成使马达轴相对于马达壳体以第一速度并沿第一方向围绕马达轴线旋转;谐波驱动器,该谐波驱动器与马达轴机械地接合,其中该谐波驱动器被构造成致使柔性花键以小于第一速度的旋转速度并沿与第一方向相反的第二方向围绕马达轴线旋转;输出齿轮,该输出齿轮被构造成围绕压缩轴线旋转,其中该柔性花键被构造成引起输出齿轮的旋转;和线性致动器,该线性致动器包括驱动器和螺杆,其中该输出齿轮被构造成引起驱动器的旋转,并且其中驱动器的旋转致使螺杆沿着压缩轴线相对于马达壳体平移以致使活塞压缩盘叠堆。
134.实施例16:根据实施例15所述的制动器组件,其中该输出齿轮被构造成引起驱动器围绕压缩轴线的旋转。
135.实施例17:根据实施例15或16所述的制动器组件,该制动器组件进一步包括输入齿轮,其中该输入齿轮被构造成围绕马达轴线与柔性花键同步旋转。
136.实施例18:根据实施例17所述的制动器组件,其中输入齿轮与输出齿轮啮合。
137.实施例19:一种方法,该方法包括:使用电动马达围绕马达轴线生成第一旋转扭矩,使用谐波驱动器响应于第一旋转扭矩而生成第二旋转扭矩;使用第二旋转扭矩旋转齿轮组的输出齿轮;以及使用输出齿轮的旋转致使线性致动器沿着压缩轴线生成线性运动,其中压缩轴线不同于马达轴线;以及使用线性致动器的线性运动致使活塞压缩盘叠堆。
138.实施例20:根据实施例19所述的方法,该方法进一步包括:使用第二旋转扭矩使输入齿轮围绕马达轴线旋转;以及使用输入齿轮使输出齿轮围绕压缩轴线旋转,其中输入齿轮与输出齿轮啮合。
139.已经描述了各种示例。这些示例和其他示例在以下权利要求书的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1