亮度降低条件下从跟随飞行器获取前导飞行器图像的系统的制作方法
亮度降低条件下从跟随飞行器获取前导飞行器图像的系统
1.本发明涉及一种用于在亮度降低的条件下、且尤其是在夜间从编队飞行中的跟随飞行器获取前导飞行器的图像的系统,在该编队飞行中跟随飞行器在前导飞行器的尾流中飞行。
2.在航空领域,“编队飞行”理解为至少两架飞行器的编队的飞行,被跟随的一架飞行器被称为前导飞行器,以及另一架飞行器被称为在前导飞行器后方飞行的跟随飞行器。这种飞行、特别是对于商用飞机的飞行具有的优点是通过减小跟随飞行器的阻力而减少了跟随飞行器的燃料消耗。然而,跟随飞行器相对于前导飞行器必须位于的区域受到限制,因此跟随飞行器的定位必须准确且快速。
3.由空中客车运营公司(airbus operations sas)和空中客车公司(airbus sas)于2020年5月26日提交的专利申请fr 2005541公开了在白天飞行背景下的此类方法。该方法需要通过一个或多个摄像机获取前导飞行器的图像,这在夜间是困难的、甚至是不可能的。
4.本发明的目的是提出一种系统,该系统使得可以在亮度降低的条件下、甚至在夜间,获取足以在与上述专利申请中描述的定位方法类似的定位方法中使用的图像。
5.为此,本发明涉及一种编队飞行中的飞行器,包括前导飞行器和在所述前导飞行器后方飞行的跟随飞行器,设置有用于由所述跟随飞行器获取所述前导飞行器的图像的系统,其特征在于,所述编队飞行中的飞行器包括至少一个安装在所述跟随飞行器上或中的相机、设置在所述跟随飞行器上并且至少部分地朝向所述前导飞行器定向的照明装置、以及设置在所述前导飞行器上的回射器类型的回射装置。
6.以这种方式,当被点亮时,回射装置允许相机即使在亮度降低的情况下也获取由所述装置标记的区域的图像。由回射装置从前导飞行器反射到跟随飞行器的光足以允许被标记区域被定界。
7.本发明提供以下单独地或组合地采用的可选特征中的至少一个特征。
8.所述回射装置包括至少一个或更多个长方形形式的回射器。
9.所述回射装置采用设置在所述前导飞行器的外表面上的条带的形式。
10.条带被附接至所述前导飞机的机身的脊上。
11.所述条带中的至少一个定位在翼型的部分或全部后缘上。
12.所述条带中的至少一个定位在水平尾部单元的部分或全部后缘上。
13.所述条带中的至少一个定位在竖直尾部单元的部分或全部后缘上。
14.所述条带中的至少一个定位在操纵面上。
15.所述回射装置包括在所述前导飞行器的尾部单元的末端处的回射器。
16.所述照明装置包括所述跟随飞行器的着陆灯。
17.其他目的、特征和优点将从本发明的以下描述中显现出来,参考附图,该描述纯粹作为非限制性示例给出,在附图中:
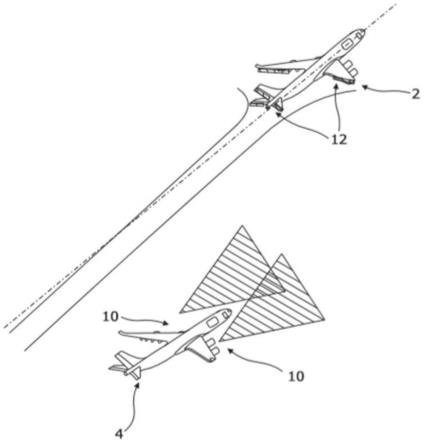
18.[图1]是编队飞行的示例的简化透视图,该编队飞行包括前导飞机和跟随飞机,跟随飞机和前导飞机这两者均设置有根据本发明的获取系统;
[0019]
[图2]是编队飞行(比如图1的编队飞行)的俯视示意图,该编队飞行包括两架飞
机,每架飞机设置有参考系并且突出显示前导飞机相对于跟随飞机的定位数据;
[0020]
[图3]是设置有参考系并且突出显示定位数据的飞机的透视图;
[0021]
[图4]是跟随飞机的内部、特别是所述跟随飞机的驾驶舱的仪表板上的相机的安装的局部透视图;
[0022]
[图5]是着陆灯打开的飞机的局部透视图;
[0023]
[图6]是从跟随飞机看到的在夜间飞行的前导飞机的透视图,跟随飞机和前导飞机这两者均设置有根据本发明的获取系统。
[0024]
在下文以商用飞机为例说明本发明。然而,本发明不限于这种应用,并且可以涉及编队飞行中的任何类型的飞行器,比如战斗机、滑翔机或者甚至混合翼飞行器。
[0025]
根据在本技术中作为示例描述的本发明的一种可能应用,根据本发明的允许获取编队飞行中的前导飞机的图像的系统可以被结合到用于确定跟随飞机相对于在跟随飞机前方飞行的前导飞机的定位的更通用的系统和方法中,这将不被更详细地描述,因为如上所述它不是本技术的主题。前导飞机2和跟随飞机4旨在形成如图1中所示的编队飞行。
[0026]
编队飞行理解为是指由至少两架飞行组成的编队,在该编队的飞行中至少一架飞机是前导飞机2,以及至少一个飞机是跟随飞机4:跟随飞机4在前导飞机2后方飞行,并且必须相对于前导飞机的位置保持其位置。因此,有必要准确而快速地确定跟随飞机相对于前导飞机的位置的位置,以便与之协调。
[0027]
为了使得可以确定跟随飞机4相对于前导飞机2的位置,跟随飞机必须实时确定前导飞机2相对于跟随飞机的自身数据的定位数据。定位理解为既指一架飞机相对于另一架飞机在笛卡尔参考系中的位置,又指由根据一架飞机相对于另一架飞机的三次旋转的三个角度定义的取向。
[0028]
如图2中所展示,每架飞机2、4设置有三维笛卡尔参考系r2、r1,该参考系的原点是所述飞机2、4的特定已知点。所述三维由表示为x、y和z的三个正交的轴线限定。此外,飞机2、4的参考系的原点可以是其平均重心,或者飞机的机身的前部部分的点(即飞机的机头)。
[0029]
因此,如图2中所展示的,跟随飞机4设置有由轴线(x1,y1,z1)限定的三维笛卡儿参考系r1,而前导飞机2设置有由轴线(x2,y2,z2)限定的三维笛卡儿参考系r2。点在参考系中(例如在参考系r1中)的位置由其根据轴线(x1,y1,z1)的坐标给出。更具体地,在当前情况下,关注集中在跟随飞行器4相对于前导飞行器2的位置。这样的位置由跟随飞行器4的参考系r1的原点在前导飞行器2的参考系r2中的坐标给出。
[0030]
在此相同的优选实施例中并且如图3中所表示的,跟随飞行器4在前导飞行器2的参考系中的取向由根据飞行器的三个标准旋转运动的三个角度限定:滚转角,表示为φ,俯仰角,表示为θ,以及偏航角,表示为ψ。跟随飞行器4相对于前导飞行器2的取向也可以由角度偏差(分别表示为δφ、δθ、δψ)定义,这些角度偏差分别表示在地面参考系中跟随飞行器4的相应滚转角、俯仰角和偏航角与前导飞行器2的相应滚转角、俯仰角和偏航角之间的角度偏差。
[0031]
跟随飞行器4相对于前导飞行器2的定位理解为所述跟随飞行器4相对于所述前导飞行器2的位置和取向。为了确定这一点,有必要实时获取前导飞机的图像,从而使得可以推导出相对于跟随飞机的位置和取向。
[0032]
如图4至图6中所展示,获取系统6安装在前导飞机2和跟随飞机4上,并且被配置为
在给定时间获取前导飞机2的图像,从而使得可以实时确定以上提及的定位数据。这种定位确定的目的是向用户装置提供定位数据,该用户装置根据定位数据确定飞行指令,尤其是用于编队飞行中跟随飞行器4的自动(或自主)驾驶。
[0033]
这种获取在亮度下降时变得困难,且甚至在夜间是不可能的。根据本发明的获取系统6包括如下设备,该设备在亮度条件不再允许使用已知系统时使得可以确定前导飞行器的定位和取向。根据本发明的获取系统6包括安装在跟随飞机4上或其中的至少一个相机8(图4)、设置在跟随飞机4上并且至少部分地朝向前导飞机2定向的照明装置10(图5)、设置在前导飞机2上的回射器类型的回射装置12(图6)。
[0034]
如图4中所展示,系统6包括至少一个相机8,该至少一个相机使得可以获得前导飞机2的实时图像。术语相机是在一般意义上的,即能够连续拍摄图像的装置。相机的分辨率应足够大,以确保良好的检测,并且获得定位确定方法所需的测量精度。根据特定实施例,最小分辨率是分布在前导飞机2的翼展上的200像素,这导致相机具有至少4000*3000像素的分辨率。系统6可以包括数个摄像机8,使得可以获得前导飞机2的不同图像,所有这些图像都被处理以获得所述飞机的角度和定位数据的最佳可能提取。在一个实施例中,相机8是固定在跟随飞机4的驾驶舱16中的摄像机。一个或多个相机8指向前方:这些相机必须能够框定所有的回射装置12。在所展示的示例中,这些相机必须允许前导飞机2的所有的后区可视化。在本发明的背景下,摄像机8可以布置在跟随飞行器4的能够拍摄期望图像的其他点处。摄像机8被配置为能够以视频流的形式拍摄前导飞机2的图像。例如,摄像机8可以固定在跟随飞机4的机身的鼻锥上。夜间测量需要使用在弱光条件下高度灵敏的相机;相机必须能够检测低亮度值。该相机还必须具有良好的对比度,以使得检测由回射装置形成的图像是容易且准确的。
[0035]
为了在夜间使飞机可视化,可以从跟随飞机照亮该飞机并且利用前导飞机的表面自然反射光,但是这不允许跟随飞机正确获取前导飞机。事实上,可用的光功率远远不够。
[0036]
为了克服在夜间使前导飞机可视化的困难,根据本发明的获取系统使用回射器类型的回射装置12,也称为角立方回射器,如图6中所展示。这种装置的特征在于,本文在此特定情况下,所接收的源自跟随飞机4的照明装置10的所有光束均被反射,而不管其在入射光通量方向上的入射:反射光线平行于入射光线。因此,源自跟随飞机4的所有光通量被反射到该跟随飞机,而不是扩散到所有反射空间中。因此,接收到的光能量足以被跟随飞机4的一个或多个相机8拾取。
[0037]
回射装置12定位在前导飞机2的确定区域上。当被点亮时,回射装置允许相机8即使在亮度降低的情况下也获取由该装置标记的区域的图像。根据图6中所展示的实施例,回射器12采取长方形形式,例如至少一个条带14的形式。术语条带在下文的描述中理解为是在回射光学系统条带的意义上。回射器12不需是长方形形式的,且在这种情况下,数个回射器可以并列设置,以便形成长方形布置,该长方形布置从远处看呈现像条带14的线的形式。使用条带14的事实简化了回射装置12在前导飞机上的固定或移除。回射器12可以胶合到前导飞机2的表面上,例如通过使用粘合条带形式的回射器。回射器12可以通过任何已知类型的设备、且优选地是可移除设备而被固定到前导飞机上,以便从飞机上移除而不损坏飞机。选择长方形形式以允许更容易地提取前导飞机的图像,从而使得可以确定以上提及的位置和角度。通过选择长方形回射器12、以及在此的条带14在前导飞机上两个正交方向上的定
位,可以提取期望的定位数据。
[0038]
事实上,前导飞机图像的获取取决于回射装置12在前导飞机上的形式和位置。在图6中所展示的形式中,回射装置12采用多个条带14的形式,该多个条带放置在前导飞机的外表面上,以便使得可以确定以上提及的定位数据。为此,条带14被设置在前导飞机2的笛卡尔参考系的轴线y和z上的线上。因此,例如,条带14被固定在轴线y上在机翼和/或水平尾部单元上,并且在轴线z上固定在竖直尾部单元上,并且更具体地,例如,固定在机翼以及水平和竖直尾部单元的操纵面(包括副翼、襟翼)上。然而,任何其他定位是可能的。根据一种可能的实施例,条带14中的至少一些附接在飞机的水平和竖直脊上。在图6中,条带14被附连到前导飞机的两个机翼中的每一个的后缘28,并且更具体地在此为从机翼中的每一个的末端到可以覆盖其长度的至少50%的点,该长度是在方向y上获得的尺寸。条带14也定位在两个水平尾部单元的后缘30上、大约在它们的整个长度上。最后,条带14被放置在竖直尾部单元的后缘32的大约整个长度上。附加回射器12采用表面的形式,这样使得可以确定所安装的所有回射器的中心点,而不是采用旨在遵循飞机脊的形式的长方形形式。在图6中,圆形形式的回射器18被放置在前导飞机的尾部单元的方向x的末端处。
[0039]
跟随飞机4本身设置有照明装置10。它可以是任何类型的并且在所展示的实施例中,照明装置使用那些已经在飞机上的照明装置之一。在图5中所展示的实施例中,装置10是飞机的所有着陆灯20。从跟随飞机的照明装置发出的光越多,并且越聚焦在回射装置12上,由相机8的传感器接收的光强度越大并且越容易获取由条带14形成的线。此外,由条带14形成的线是特定的,并且可容易通过常规图像处理方法检测,比如使用canny滤波器的轮廓检测。
[0040]
根据一个实施例,相机8和/或照明装置10当例如是着陆灯20时可以从驾驶舱16中可接近的控制件手动地控制。根据另一个实施例,获取系统6包括中央控制单元,以允许来自相机8和/或照明装置10的接口的控制。具有与飞行员的接口的控制单元使得可以控制一个或多个相机8的传感器、获取图像的方式(比如与外部源的同步)、相机的光学系统(比如图像的对比度、变焦水平等)、以及还有非常简单地启动和停止所述相机。以这种方式,控制单元使得可以从接口开始和停止照明装置10、设置其亮度和取向、和/或任何其他可用功能。
[0041]
如图4中所表示,获取系统6连接到处理装置(未表示),以用于处理源自相机的视频流。处理装置包括接收单元,以用于由相机实时传输的图像。根据本发明,“实时”是指用于图像处理的等待时间小于极限时间,该极限时间允许正确执行由计算机实施的自动化法则,自动化法则对飞行器的位置进行控制。在图4中,相机8通过连接器26连接到处理装置的所述接收单元。所述接收单元包括存储器(比如缓存内存),以用于临时保存所述图像并使它们对图像处理单元可用。
[0042]
在处理由该单元获得的图像时,不再需要提取飞机的轮廓。使用存储在系统的存储器中的数据库,该存储器存储的不是前导飞机轮廓的完整三维模型、而是由条带14标记的区域的布置,这些条带根据所涉及飞机而不同来表征它。根据一个实施例,数据库包含跟随飞机可能跟随的所有类型飞机的被标记区域的布置。提取飞机的轮廓和使用整个飞机的模型仍然是可能的,但是使得定位确定方法更加复杂。如上所见的实际装置和处理方法不是本发明的主题,因此不进行更详细的描述。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1