一种推正无人机的方法及装置与流程
本说明书涉及计算机,尤其涉及一种推正无人机的方法及装置。
背景技术:
1、目前,在无人机执行业务的过程中,由于无人机降落角度存在偏差,需要对无人机进行推正定位,再对无人机进行自动装卸货、自动更换电池、自动充电等操作。在对无人机进行推正的过程中,推杆组件对应有固定的运动轨迹与固定的速度。由于无法确定无人机降落的位置坐标,各推杆组件可能会在不同的时间与无人机发生接触,无法同时对无人机施加推力,导致推正无人机的效率较低。
2、因此,如何能够提高推正无人机的效率,则是一个亟待解决的问题。
技术实现思路
1、本说明书提供一种推正无人机的方法及装置,以部分的解决现有技术存在的上述问题。
2、本说明书采用下述技术方案:
3、本说明书提供了一种推正无人机的方法,所述方法用于推正停靠在无人机停靠设备上的无人机,所述无人机停靠设备包括:停靠平台、在所述停靠平台内停靠区域设置有光幕传感器以及若干个推杆组件,包括:
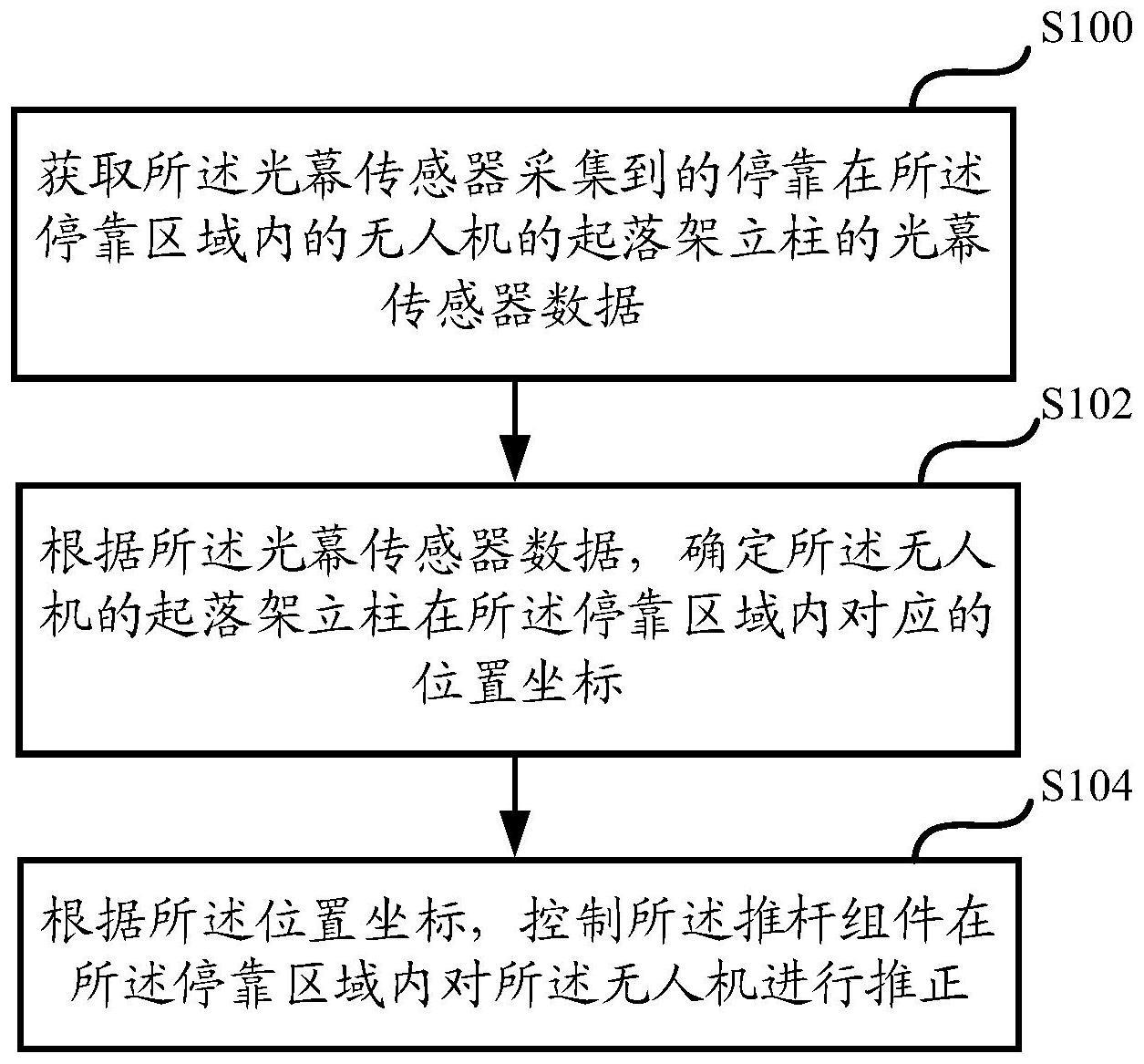
4、获取所述光幕传感器采集到的停靠在所述停靠区域内的无人机的起落架立柱的光幕传感器数据;
5、根据所述光幕传感器数据,确定所述无人机的起落架立柱在所述停靠区域内对应的位置坐标;
6、根据所述位置坐标,控制所述推杆组件在所述停靠区域内对所述无人机进行推正。
7、可选地,所述光幕传感器包括:横向光幕发射端、横向光幕接收端、纵向光幕发射端、纵向光幕接收端;
8、获取所述光幕传感器采集到的停靠在所述停靠区域内的无人机的起落架立柱的光幕传感器数据,具体包括:
9、获取所述横向光幕接收端接收到的所述横向光幕发射端发射的红外线,以及所述纵向光幕接收端接收到的所述纵向光幕发射端发射的红外线;
10、将所述横向光幕接收端未接收到红外线的位置坐标,以及所述纵向光幕接收端未接收到红外线的位置坐标,作为光幕传感数据。
11、可选地,根据所述光幕传感器数据,确定所述无人机的起落架立柱在所述停靠区域内对应的位置坐标,具体包括:
12、获取所述无人机的各起落架立柱之间的间距;
13、根据所述无人机的各起落架立柱之间的间距以及所述光幕传感器数据,确定所述无人机的各起落架立柱在所述停靠区域内对应的位置坐标。
14、可选地,根据所述位置坐标,控制所述推杆组件在所述停靠区域内对所述无人机进行推正,具体包括:
15、根据所述位置坐标,确定所述无人机在所述停靠区域内的偏转角;
16、根据所述位置坐标以及所述偏转角,确定所述推杆组件对应的控制参数;
17、根据所述推杆组件对应的控制参数,控制所述推杆组件在所述停靠区域内对所述无人机进行推正。
18、可选地,根据所述位置坐标以及所述偏转角,确定所述推杆组件对应的控制参数,具体包括:
19、根据所述位置坐标,确定所述无人机的起落架类型;
20、若确定所述无人机的起落架类型为长方形起落架,判断所述偏转角是否小于确定出的所述无人机对应的偏转角阈值,得到判断结果,其中,所述长方形起落架包含有长边起落架、短边起落架,长边起落架的两个起落架立柱之间的间距大于短边起落架的两个起落架立柱之间的间距;
21、根据所述判断结果,确定所述推杆组件对应的控制参数。
22、可选地,根据所述判断结果,确定所述推杆组件对应的控制参数,具体包括:
23、若确定所述偏转角不小于所述偏转角阈值,确定接触所述无人机的长边起落架的推杆组件对应的控制参数,作为长边控制参数,以及确定接触所述无人机的短边起落架的推杆组件对应的控制参数,作为短边控制参数;
24、根据所述推杆组件对应的控制参数,控制所述推杆组件在所述停靠区域内对所述无人机进行推正,具体包括:
25、通过所述长边控制参数,控制接触所述长边起落架的推杆组件先推动所述长边起落架,再通过所述短边控制参数,控制接触所述短边起落架的推杆组件推动所述短边起落架,以对所述无人机进行推正。
26、可选地,通过所述长边控制参数,控制接触所述长边起落架的推杆组件先推动所述长边起落架,再通过所述短边控制参数,控制接触所述短边起落架的推杆组件推动所述短边起落架,以对所述无人机进行推正,具体包括:
27、通过所述长边控制参数,控制接触所述长边起落架的推杆组件先推动所述长边起落架,并在确定经接触所述长边起落架的推杆组件的推动后,所述无人机的偏转角小于所述偏转角阈值时,通过所述短边控制参数以及所述长边控制参数,控制接触所述短边起落架的推杆组件以及接触所述长边起落架的推杆组件同时推动所述无人机的起落架立柱,以对所述无人机进行推正。
28、可选地,根据所述判断结果,确定所述推杆组件对应的控制参数,具体包括:
29、若确定所述偏转角小于所述偏转角阈值,确定用于使所述推杆组件同时推动所述无人机的起落架立柱的控制参数。
30、可选地,所述方法还包括:
31、若确定所述无人机的起落架类型为正方形起落架,确定用于使所述推杆组件同时推动所述无人机起落架立柱的控制参数,其中,所述正方形起落架的四个起落架立柱之间的间距相等。
32、可选地,所述控制参数包括第一控制速度以及第二控制速度,所述第一控制速度大于所述第二控制速度;
33、根据所述推杆组件对应的控制参数,控制所述推杆组件在所述停靠区域内对所述无人机进行推正,具体包括:
34、根据所述推杆组件对应的控制参数,控制所述推杆组件按照所述第一控制速度向所述起落架立柱进行移动,并在确定所述推杆组件接触到所述起落架立柱后,按照所述第二控制速度,控制所述推杆组件推动所述起落架立柱,以对所述无人机进行推正。
35、可选地,确定所述无人机对应的偏转角阈值,具体包括:
36、获取所述无人机对应的推正参数,以及所述推杆组件对应的推力,所述推正参数包括:所述无人机的无人机参数、所述无人机的起落架立柱与所述推杆组件之间的摩擦系数、所述无人机的起落架立柱与所述停靠平台之间的摩擦系数;
37、根据所述推正参数以及所述推杆组件对应的推力,确定所述推杆组件对应的扭矩;
38、根据所述推杆组件对应的扭矩,确定所述无人机对应的偏转角阈值。
39、本说明书提供了一种推正无人机的装置,所述装置用于推正停靠在无人机停靠设备上的无人机,所述无人机停靠设备包括:停靠平台、在所述停靠平台内停靠区域设置有光幕传感器以及若干个推杆组件,包括:
40、获取模块,用于获取所述光幕传感器采集到的停靠在所述停靠区域内的无人机的起落架立柱的光幕传感器数据;
41、确定模块,用于根据所述光幕传感器数据,确定所述无人机的起落架立柱在所述停靠区域内对应的位置坐标;
42、推正模块,用于根据所述位置坐标,控制所述推杆组件在所述停靠区域内对所述无人机进行推正。
43、可选地,所述推杆组件由推杆、伺服电机、传动轴和滑动组件构成,所述传动轴与所述滑动组件连接,所述伺服电机通过所述传动轴带动所述滑动组件工作,使得所述推杆在所述滑动组件上进行滑动。
44、本说明书提供了一种计算机可读存储介质,所述存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述推正无人机的方法。
45、本说明书提供了一种无人机的停靠设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现上述推正无人机的方法。
46、本说明书采用的上述至少一个技术方案能够达到以下有益效果:
47、在本说明书提供的推正无人机的方法中。首先,获取光幕传感器采集到的停靠在停靠区域内的无人机的起落架立柱的光幕传感器数据。其次,根据光幕传感器数据,确定无人机的起落架立柱在停靠区域内对应的位置坐标。最后,根据位置坐标,控制推杆组件在停靠区域内对无人机进行推正。
48、从上述方法中可以看出,本方法可以通过光幕传感器采集到的光幕传感器数据,确定出无人机的起落架立柱的位置坐标。本方法可以预先确定出无人机的起落架立柱对应的位置坐标,控制各推杆组件同时对无人机施加推力,提高推正无人机的效率。
- 还没有人留言评论。精彩留言会获得点赞!