一种密闭狭小复杂空间巡视无人机的制作方法
1.本实用新型涉及无人机技术领域,尤其涉及一种密闭狭小复杂空间巡视无人机。
背景技术:
2.现有常见的针对密闭狭小复杂空间进行巡视检查的方式有人员巡视、机器人巡视等。
3.对于前一种巡视方式,人员进入密闭狭小空间作业时,需要严格执行“先通风、先检测、后作业”的原则,在作业时,需要进入人员系好安全带,佩戴氧气呼吸面具等多种装备。采用这种巡视方式,首先在进入密闭狭小复杂空间时就会对作业人员的人身安全造成隐患;其次,在执行通风、先期检测时会浪费宝贵的检修巡查时间,造成不可估量的影响;再者,作业人员配备的各种装备体积较大,不利于作业人员施展,并且成本较高。
4.对于后一种巡视方式,车型机器人对密闭狭小空间进行巡视检查时,有一定的局限性:若需要检测的空间在高度上的变化过大,则这种车型机器人的检测覆盖范围就不能达到要求;另外,这种机器人主要利用轮式或履带进行行进的,如果是空间内地面环境非常复杂,那么这种方式也不能满足作业要求。
5.因此,有必要设计一种密闭狭小复杂空间巡视无人机,以解决上述问题。
技术实现要素:
6.本实用新型的目的在于提出一种能够实现在密闭狭小复杂空间内执行巡视任务的无人机。
7.为达此目的,本实用新型采用以下技术方案:
8.一种密闭狭小复杂空间巡视无人机,其特征在于,包括防护罩、无人机主体、图像采集装置、多个障碍物测距装置、下视测距装置及遥控装置;所述防护罩具有中空的笼式结构;所述无人机主体、所述图像采集装置、各所述障碍物测距装置及所述下视测距装置均安装于所述防护罩内,并均与所述遥控装置信号连接;
9.所述图像采集装置用于采集密闭狭小复杂空间内的图像信息,并传输至所述遥控装置;
10.所述障碍物测距装置及所述下视测距装置分别用于测量所述无人机主体与四周的障碍物之间的距离及所述无人机主体距离地面的高度,并传输给所述遥控装置;
11.所述遥控装置接收各所述障碍物测距装置及所述下视测距装置传送的数据并据此控制所述无人机主体调整飞行姿态及飞行路线。
12.进一步地,还包括前向补光模块,所述前向补光模块用于对所述图像采集装置进行补光,并与所述遥控装置信号连接。
13.进一步地,所述前向补光模块、所述图像采集装置及其中一个所述障碍物测距装置通过两轴云台与所述防护罩连接。
14.进一步地,所述防护罩开设有用于露出所述前向补光模块、所述图像采集装置及
所述障碍物测距装置的窗口。
15.进一步地,还包括侧向补光模块,所述侧向补光模块设置于所述无人机主体的侧部,并与所述遥控装置信号连接。
16.进一步地,所述无人机主体包括图像传输系统,所述图像采集装置通过所述图像传输系统向所述遥控装置传输图像信息。
17.进一步地,所述遥控装置连接有显示模块。
18.优选的,各所述障碍物测距装置均为激光雷达。
19.优选的,所述下视测距装置为激光雷达。
20.优选的,所述图像采集装置为高清摄像机。
21.本实用新型的有益效果为:
22.1、本实用新型的密闭狭小复杂空间巡视无人机,通过设置障碍物测距装置,可实现无人机在行进方向上避开障碍物;通过设置下视测距装置,可实现无人机作业时在作业高度位置上的稳定;通过设置笼式结构的防护罩,使得正常飞行速度产生的碰撞不会对无人机状态及内部结构和组件产生影响,发生碰撞后,调整好无人机姿态后即可继续执行巡视任务。
23.2、本实用新型的密闭狭小复杂空间巡视无人机,可以减少人员在进入作业之前需要通风、检测所花费的前期准备时间和工作量;无人机作业不需要配备各种大体积高成本的防护装备,减小作业成本;另外,无人机在飞行高度上限制很小,可以覆盖绝大多数高度空间,同时对地面环境没有特殊要求。
附图说明
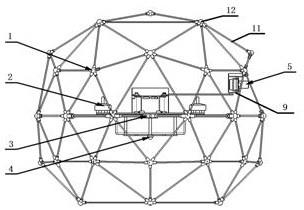
24.图1是本实用新型提供的密闭狭小复杂空间巡视无人机的结构示意图;
25.图2是本实用新型提供的密闭狭小复杂空间巡视无人机在另一角度的结构示意图;
26.图3是本实用新型提供的密闭狭小复杂空间巡视无人机的结构框图。
27.图中:1
‑
防护罩;11
‑
碳纤维管;12
‑
尼龙转接头;13
‑
窗口;2
‑
无人机主体;21
‑
机体;22
‑
图像传输系统;23
‑
动力系统;24
‑
飞行控制系统;25
‑
供电系统;3
‑
侧向补光模块;4
‑
下视测距装置;5
‑
图像采集装置;6
‑
障碍物测距装置;7
‑
遥控装置;8
‑
前向补光模块;9
‑
两轴云台。
具体实施方式
28.下面结合附图并通过具体实施方式来进一步说明本实用新型的技术方案。
29.如图1至3所示,一种密闭狭小复杂空间巡视无人机,包括防护罩1、无人机主体2、图像采集装置5、多个障碍物测距装置6、下视测距装置4、前向补光模块8、侧向补光模块3及遥控装置7。
30.具体的,该密闭狭小复杂空间巡视无人机中,防护罩11具有中空的笼式结构,采用碳纤维管11及高强度的尼龙转接头12组装为一体,可实现对无人机主体2进行整体防护,以保证在正常飞行速度下产生碰撞时无人机的飞行姿态不会发生太大变化,并且内部结构与组件不会发生损坏,可以继续执行巡视任务。
31.该密闭狭小复杂空间巡视无人机中,无人机主体2、图像采集装置5、各障碍物测距装置6及下视测距装置4均安装于防护罩1内,并均与遥控装置7信号连接。
32.其中,无人机主体2包括机体21、图像传输系统22、动力系统23、飞行控制系统24和供电系统25等。其中,遥控装置7与飞行控制系统24信号连接,用于向飞行控制系统24发送指令;飞行控制系统24接收指令后控制动力系统23调整机体21的飞行姿态及飞行路线。供电系统25用于向图像传输系统22、动力系统23、飞行控制系统24等的机载用电设备进行供电。
33.各障碍物测距装置6分布于无人机主体2的前、后、左、右,用于测量无人机主体2与四周的障碍物之间的距离,并将测量的数据传输至遥控装置7,从而实现无人机在行进方向上避开障碍物。该障碍物测距装置6优选为激光雷达。
34.下视测距装置4用于实时测量无人机主体2距离地面的高度,并将测量的数据传输至遥控装置7,从而保证无人机作业时在作业高度位置上的稳定。该下视测距装置4优选为激光雷达。
35.图像采集装置5用于采集密闭狭小复杂空间内的图像信息,并通过图像传输系统22传输至遥控装置7;其中,图像传输系统22可以在回传图像采集装置5采集的实时图像信息的同时完成遥控信号的传输。该图像采集装置5优选为高感光高清摄像机,以保证在低光环境下拍摄的图像中能够观测管道损坏、裂纹等缺陷。
36.该密闭狭小复杂空间巡视无人机中,侧向补光模块3主要用于给飞行作业人员在视距范围内提供无人机位置状态做参考用。前向补光模块8主要用于对图像采集装置5进行补光,以进一步提升拍摄效果。该前向补光模块8及侧向补光模块3均与遥控装置7信号连接,通过遥控装置7可实现明灭和亮度的控制。如在无人机起飞和降落的过程中,由于无需进行补光,因此,可以通过遥控装置7熄灭前向补光模块8及侧向补光模块3。其中,前向补光模块8及侧向补光模块3均采用了led灯。
37.该密闭狭小复杂空间巡视无人机中,前向补光模块8、图像采集装置5及其中一个障碍物测距装置6通过两轴云台9与防护罩1连接。其中,防护罩1开设有窗口13,用于露出前向补光模块8、图像采集装置5及该障碍物测距装置6,以避免防护罩1挡住图像采集装置5的拍摄视线、前向补光模块8的光线及该障碍物测距装置6的激光射线。
38.该密闭狭小复杂空间巡视无人机中,遥控装置7连接有显示模块,显示模块包括显示屏,用于显示遥控装置7接收的数据及图像信息。优选的,该遥控装置7为带显示屏的一体式遥控器。
39.本实用新型的密闭狭小复杂空间巡视无人机,在飞行作业时,飞行人员通过手动操控无人机进入作业空间,利用高清摄像机进行视频或照片采集,并通过图像传输系统22将视频或照片实时传输到一体式遥控器上;障碍物测距装置6辅助无人机进行行进方向上的避障,下视测距装置4辅助无人机实现在作业高度位置上的稳定,飞行人员通过一体式遥控器可以观察到上述所有的回传数据,并依此对无人机飞行姿态和飞行线路进行判定并执行巡视任务。
40.另外,利用本实用新型的无人机执行巡视任务时,不需要做大量的前期准备工作,而且无人机上可以搭载气体检测模块进行实时监测,不需要人员进入空间内操作,因此不会对人员造成人身危险;不需要配备各种大体积高成本的防护装备,减小了作业成本;另
外,无人机对地面环境没有特殊要求,而且对大多数大高度区域空间都可以实现覆盖检测,总体来说,无人机在执行对密闭狭小复杂空间巡视的容错率更高。
41.以上结合具体实施例描述了本实用新型的技术原理。这些描述只是为了解释本实用新型的原理,而不能以任何方式解释为对本实用新型保护范围的限制。基于此处的解释,本领域的技术人员不需要付出创造性的劳动即可联想到本实用新型的其它具体实施方式,这些方式都将落入本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1