一种多旋翼无人机的制作方法
1.本实用新型涉及无人机技术领域,尤其涉及一种多旋翼无人机。
背景技术:
2.无人机(uav)是无人航空器(unmannedaerialvehicle)的简称,是一种不载操作人员、用空气动力产生运载工具升力、能够自主或遥控飞行、能够一次使用或回收并且载有杀伤或非杀伤有效载荷的有动力的航空器。总的来说,分为固定翼无人机、无人直升机和多旋翼无人机三大类,其中多旋翼无人机,是一种具有三个及以上旋翼轴的特殊的无人驾驶直升机。
3.但是现在的多旋翼无人机在使用中虽然可以转动摄像头,但是转动时候的稳定性比较差,导致传输回来的画面比较晃动,而且现在的多旋翼无人机的摄像头一般都是固定安装的,这样在摄像头损坏需要维修时没有专业的工具无法拆卸,而且拆卸速度十分缓慢,不方便使用。
技术实现要素:
4.本实用新型的目的在于克服现有技术的不足,适应现实需要,提供一种结构设计新颖、适用于大口径管道上的一种多旋翼无人机。
5.为了实现本实用新型的目的,本实用新型所采用的技术方案为:
6.设计一种多旋翼无人机,包括一个无人机本体,所述无人机本体固定连接有一个转动机构,所述转动机构下端固定连接有一个安装机构,所述安装机构内部固定连接有一个驱动机构,位于所述安装机构内部的驱动机构螺纹连接有一个卡接机构,所述卡接机构下端扣接有一个摄像机构。
7.所述转动机构包括一个支撑架,所述支撑架固定连接在无人机本体下端,且所述支撑架下端开设有一个圆形槽,所述圆形槽两侧滑动连接有两根呈对称设置的滑杆,位于圆形槽之间支撑架下表面中心处固定连接有第一步进电机。
8.所述安装机构包括一个安装箱,所述安装箱固定连接在两根滑杆和第一步进电机下端,且所述安装箱顶端内部开设有一个滑槽,所述安装箱一侧箱壁贯穿开设有一个第一安装孔,所述安装箱下端箱壁两侧贯穿开设有两个对称设置的第二安装孔。
9.所述驱动机构包括一块放置板,所述放置板固定连接在位于第一安装孔下端的安装箱外箱壁,且所述放置板上表面固定连接有一个第二步进电机,所述第二步进电机输出端固定连接有一根双向螺纹杆,且所述双向螺纹杆远离第二步进电机的一侧穿过第一安装孔并延伸至安装箱且通过两个轴承转动连接在安装箱内部。
10.所述卡接机构包括两个螺纹套,两个所述螺纹套呈对称设置螺纹连接在双向螺纹杆两侧杆壁,且两个所述螺纹套上端均固定连接有一块滑板,两块所述滑板上端延伸至滑槽内并滑动连接在滑槽内,两个所述螺纹套下端固定连接有两根呈对称设置的l形杆。
11.所述摄像机构包括两根插杆,两根所述插杆活动插设在两个第二安装孔并延伸至
安装箱内,且两根所述插杆相向一侧杆壁均开设有一个插槽,两个所述插槽卡接在两根l形杆杆壁上,且两根所述插杆下端穿过两个第二安装孔并延伸至安装箱外且共同固定连接有一个摄像头。
12.本实用新型的有益效果在于:
13.本设计通过第一步进电机带动安装箱转动,从而可以带动两根滑杆在环形槽内部稳定转动,从而可以增加安装箱和摄像头的转动稳定性,通过设置第二步进电机方便带动双向螺纹杆转动,从而可以在两块滑板和滑槽的滑动限位作用带动两根l形杆往相对一侧移动,从而可以快速卡接在两根插杆上的两个插槽内,便于快速对两根l形杆进行限位,从而方便快速更换摄像头。
附图说明
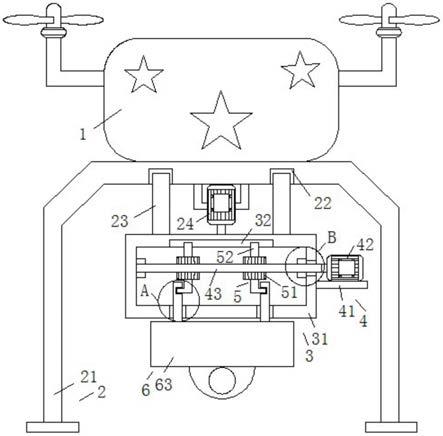
14.图1为本设计的一种多旋翼无人机整体剖视结构示意图;
15.图2为本设计的一种多旋翼无人机图1中a部分的放大结构示意图;
16.图3为本设计的一种多旋翼无人机图1中b部分的放大结构示意图;
17.图4为本设计的一种多旋翼无人机支撑架的仰视剖视结构示意图;
18.图5为本设计的一种多旋翼无人机安装箱的俯视剖视结构示意图。
具体实施方式
19.下面结合附图和实施例对本实用新型进一步说明:
20.实施例1:一种多旋翼无人机,参见图1至图5。
21.本设计其一种多旋翼无人机,包括一个无人机本体1,无人机本体1固定连接有一个转动机构2,转动机构2下端固定连接有一个安装机构3,安装机构3内部固定连接有一个驱动机构4,位于安装机构3内部的驱动机构4螺纹连接有一个卡接机构5,卡接机构5 下端扣接有一个摄像机构6。
22.进一步的,转动机构2包括一个支撑架21,支撑架21固定连接在无人机本体1下端,且支撑架21下端开设有一个圆形槽22,圆形槽22两侧滑动连接有两根呈对称设置的滑杆 23,位于圆形槽22之间支撑架21下表面中心处固定连接有第一步进电机24,有利于通过圆形槽22和两根滑杆23方便增加安装机构3的稳定性,通过第一步进电机24方便稳定调动安装机构3转动。
23.进一步的,安装机构3包括一个安装箱31,安装箱31固定连接在两根滑杆23和第一步进电机24下端,且安装箱31顶端内部开设有一个滑槽32,安装箱31一侧箱壁贯穿开设有一个第一安装孔33,安装箱31下端箱壁两侧贯穿开设有两个对称设置的第二安装孔 34,有利于通过滑槽32方便滑动连接两块滑板52,通过第一安装孔33方便双向螺纹杆 43转动,通过两个第二安装孔34方便两根插杆61进出安装箱31。
24.进一步的,驱动机构4包括一块放置板41,放置板41固定连接在位于第一安装孔33 下端的安装箱31外箱壁,且放置板41上表面固定连接有一个第二步进电机42,第二步进电机42输出端固定连接有一根双向螺纹杆43,且双向螺纹杆43远离第二步进电机42的一侧穿过第一安装孔33并延伸至安装箱31且通过两个轴承转动连接在安装箱31内部,有利于通过第二步进电机42方便带动双向螺纹杆43转动,从而可以稳定驱动卡接机构5。
25.进一步的,卡接机构5包括两个螺纹套51,两个螺纹套51呈对称设置螺纹连接在双向螺纹杆43两侧杆壁,且两个螺纹套51上端均固定连接有一块滑板52,两块滑板52上端延伸至滑槽32内并滑动连接在滑槽32内,两个螺纹套51下端固定连接有两根呈对称设置的l形杆53,有利于通过两块滑板52和两个滑槽32的滑动限位作用方便带动两个螺纹套51往双向螺纹杆43相对一侧移动,便于带动两根l形杆53对两根插杆61进行限位。
26.进一步的,摄像机构6包括两根插杆61,两根插杆61活动插设在两个第二安装孔34 并延伸至安装箱31内,且两根插杆61相向一侧杆壁均开设有一个插槽62,两个插槽62 卡接在两根l形杆53杆壁上,且两根插杆61下端穿过两个第二安装孔34并延伸至安装箱31外且共同固定连接有一个摄像头63,有利于通过两根插杆61方便插设在两个第二安装孔34内,通过两个插槽62方便扣接两根l形杆53,通过摄像头63方便拍摄。
27.本设计的一种多旋翼无人机,先将支撑架21稳定放置在地面上,然后将两根插杆61 穿过两个第二安装孔34插设在安装箱31,两根插杆61带动摄像头63和安装箱31相抵时,启动第二步进电机42,第二步进电机42输出端通过两个轴承和第一安装孔33带动双向螺纹杆43转动,此时双向螺纹杆43会驱动两个螺纹套51,两个螺纹套51由于两块滑板52 在滑槽32内的滑动限位作用会往两根插杆61方向移动,此时两个螺纹套51会同步带动两根l形杆53移动,当两根l形杆53插设在两根插杆61上的插槽62内部时,此时摄像头63会稳定安装在安装箱31下端,然后关闭第二步进电机42,启动无人机本体1,无人机本体1上端的多个旋翼会带动支撑架21和摄像头63升空,当需要拍摄其他位置时,启动第一步进电机24,第一步进电机24输出带动安装箱31缓慢转动,安装箱31带动两根滑杆23在圆形槽22内稳定滑动,增加摄像头63转动时的稳定性,使得本实用新型具有方便拆装,且便于增加转动稳定性的好处。
28.本实用新型的实施例公布的是较佳的实施例,但并不局限于此,本领域的普通技术人员,极易根据上述实施例,领会本实用新型的精神,并做出不同的引申和变化,但只要不脱离本实用新型的精神,都在本实用新型的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1