一种光电吊舱的制作方法
1.本实用新型涉及飞行器技术领域,特别涉及一种光电吊舱。
背景技术:
2.近年来小型无人飞行器在商用、工业及军用领域得到了快速发展和应用,同时也带动了光电吊舱的发展,光电吊舱是机载光电设备(如相机、激光测距仪)的载体。
3.现有光电吊舱多为两轴式,通过伺服电机驱动光电设备绕俯仰轴和方位轴转动,用于隔离飞行器姿态变化或外界扰动对光电设备指向的影响,并控制光电设备的指向。由于小型无人飞行器产品共同的痛点是有效载荷的重量和续航时间,因此,相应要求所搭载的光电吊舱具有更小的体积和重量,同时兼顾成像效果、稳定精度和防护性能等。然而,市面上现有高精度吊舱往往体积大、重量大,微型光电吊舱往往牺牲成像效果、稳定精度或防护性能,使用存在一定局限。
4.因此,如何减小产品体积和重量的同时兼顾成像效果、稳定精度和防护性能,是本领域技术人员目前需要解决的技术问题。
技术实现要素:
5.本实用新型的目的是提供一种光电吊舱,在兼顾成像效果、稳定精度和防护性能的同时,能够减小体积和重量。
6.为实现上述目的,本实用新型提供一种光电吊舱,包括俯仰舱和方位舱,所述俯仰舱的内部设有位于中部的机芯组件以及分别位于所述机芯组件两侧的俯仰从动轴系和俯仰主动轴系,所述方位舱的内部和所述俯仰主动轴系均设有扁平结构的驱动机构,所述方位舱的内部还设有位于所述方位舱的所述驱动机构的外侧的方位轴承。
7.可选地,所述俯仰从动轴系包括俯仰从动轴以及通过胶水粘接于所述俯仰从动轴的内部的磁铁,还包括与所述磁铁正对设置的俯仰磁编码器芯片、用以固定安装所述俯仰磁编码器芯片的俯仰板以及与所述俯仰板定位配合的俯仰从动轴座,所述俯仰板与所述磁铁之间设有密封板,所述密封板粘接于所述俯仰从动轴座上。
8.可选地,所述俯仰舱的所述驱动机构包括俯仰电机线圈和俯仰电机转子,所述俯仰电机转子固接于所述俯仰主动轴系的俯仰主动轴上,所述俯仰电机线圈与所述俯仰主动轴系的俯仰主动轴座配合连接,还包括与所述俯仰主动轴座固接、用以压紧所述俯仰电机线圈端面的端盖,且所述端盖上设有用以供所述俯仰电机线圈的电线穿过的过线孔,所述过线孔通过灌胶实现密封。
9.可选地,所述机芯组件包括用以采集红外图像的红外组件和用以采集可见光图像的可见光组件,且所述红外组件的光轴与所述可见光组件的光轴平行,所述红外组件的光轴与所述俯仰舱的转动轴线垂直。
10.可选地,所述方位舱为u型方位舱,所述俯仰舱为球形俯仰舱,所述u型方位舱具有用以容置所述球形俯仰舱的容纳槽,还包括用以支撑所述u型方位舱以供所述u型方位舱绕
所述方位轴转动的安装座。
11.可选地,所述方位舱包括外壳、驱动板、方位磁编码器芯片和方位上盖,所述方位磁编码器芯片设于所述驱动板上,所述驱动板设有用以与所述方位上盖上的定位柱配合的定位孔,所述方位上盖设有与所述外壳配合的配合面,所述配合面设有用以放置密封圈的凹槽。
12.相对于上述背景技术,本实用新型实施例所提供的光电吊舱,包括俯仰舱和方位舱,俯仰舱的内部设有位于中部的机芯组件以及分别位于机芯组件两侧的俯仰从动轴系和俯仰主动轴系,方位舱的内部和俯仰主动轴系均设有扁平结构的驱动机构,方位舱的内部还设有位于方位舱的驱动机构的外侧的方位轴承。这样一来,一方面,通过将俯仰从动轴系和俯仰主动轴系设置在机芯组件的两侧,可以有效提高俯仰舱内部空间的利用率,有利于选择更大尺寸的机芯组件,从而提高成像效果;另一方面,方位舱内的驱动机构和俯仰主动轴系的驱动机构均为扁平结构,这样可以在一定程度上减小各自轴向的尺寸,同时,通过将方位轴承设置于方位舱的驱动机构的外侧以避免增加沿方位轴方向的尺寸。上述光电吊舱在兼顾成像效果和稳定精度的同时,能够减小体积和重量,从而可以缩减整体结构的体积以及减少运行功耗。
附图说明
13.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
14.图1为本实用新型实施例所提供的光电吊舱的正视图;
15.图2为本实用新型实施例所提供的光电吊舱的左视剖视图;
16.图3为本实用新型实施例所提供的光电吊舱的正视剖视图;
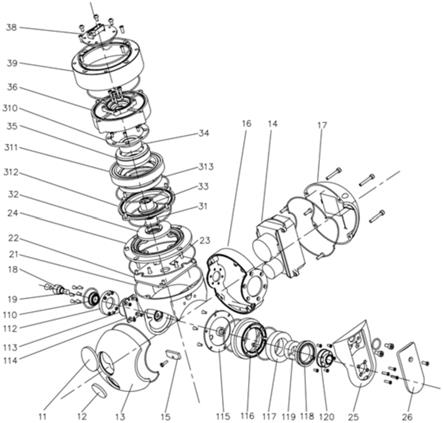
17.图4为本实用新型实施例所提供的光电吊舱的轴侧爆炸图。
18.其中:
[0019]1‑
俯仰舱,11
‑
红外窗口,12
‑
可见光窗口,13
‑
前壳,14
‑
机芯组件,15
‑
俯仰配重块,16
‑
中框,17
‑
后壳,18
‑
俯仰从动轴,19
‑
磁铁,110
‑
俯仰从动轴承,111
‑
俯仰磁编码器芯片,112
‑
俯仰从动轴座,113
‑
密封板,114
‑
俯仰板,115
‑
端盖,116
‑
俯仰主动轴座,117
‑
俯仰电机线圈,118
‑
俯仰主动轴承,119
‑
俯仰电机转子,120
‑
俯仰主动轴,121
‑
俯仰舱出线;
[0020]2‑
方位舱,21
‑
外壳,22
‑
驱动板,23
‑
方位磁编码器芯片,24
‑
方位上盖,25
‑
方位舱侧支架,26
‑
方位舱侧盖板;
[0021]3‑
安装座,31
‑
码盘端盖,32
‑
码盘,33
‑
码盘支架,34
‑
方位电机转子,35
‑
方位电机线圈,36
‑
方位轴座,37
‑
安装座出线,38
‑
接口板,39
‑
外罩,310
‑
方位电机端盖,311
‑
方位轴承,312
‑
方位轴承端盖,313
‑
方位轴,314
‑
方位舱出线。
具体实施方式
[0022]
下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的
实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
[0023]
本实用新型的核心是提供一种光电吊舱,在兼顾成像效果、稳定精度和防护性能的同时,能够减小体积和重量。
[0024]
为了使本技术领域的技术人员更好地理解本实用新型方案,下面结合附图和具体实施方式对本实用新型作进一步的详细说明。
[0025]
需要说明的是,下文所述的“上端、下端、左侧、右侧”等方位词都是基于说明书附图所定义的。
[0026]
请参考图1至图4,图1为本实用新型实施例所提供的光电吊舱的正视图;图2为本实用新型实施例所提供的光电吊舱的左视剖视图;
[0027]
图3为本实用新型实施例所提供的光电吊舱的正视剖视图;图4为本实用新型实施例所提供的光电吊舱的轴侧爆炸图。
[0028]
本实用新型实施例所提供的光电吊舱,如图1所示,包括俯仰舱1、方位舱2和安装座3,其中,俯仰舱1内置光电设备、伺服驱动系统,俯仰舱1能够绕俯仰转动轴线转动;方位舱2内置伺服驱动系统,方位舱2支撑俯仰舱1,以供俯仰舱1绕方位转动轴线转动;安装座3为圆柱体结构,安装座3用于与光电吊舱的载体连接,安装座3支撑方位舱2以供方位舱2绕方位转动轴线转动。
[0029]
作为优选的,方位舱2为u型方位舱,俯仰舱1为球形俯仰舱,u型方位舱具有用于容置球形俯仰舱的容纳槽。
[0030]
进一步地,俯仰舱1的内部设有位于中部的机芯组件14以及分别位于机芯组件14两侧的俯仰从动轴系和俯仰主动轴系;方位舱2的内部和俯仰主动轴系均设有扁平结构的驱动机构,当然,根据实际需要,俯仰舱1的驱动机构和方位舱2的驱动机构均为分离式的力矩电机,俯仰舱1的驱动机构包括俯仰电机线圈117和俯仰电机转子119,方位舱2的驱动机构包括方位电机线圈35和方位电机转子34;方位舱2的内部还设有位于方位舱2的驱动机构的外侧的方位轴承311。
[0031]
这样一来,一方面,通过将俯仰从动轴系和俯仰主动轴系设置在机芯组件14的两侧,可以有效提高俯仰舱1内部空间的利用率,有利于选择更大尺寸的机芯组件14,从而提高成像效果;另一方面,方位舱2内的驱动机构和俯仰主动轴系的驱动机构均为扁平结构,这样可以在一定程度上减小各自轴向的尺寸,同时,通过将方位轴承311设置于方位舱2的驱动机构的外侧以避免增加沿方位转动轴线方向的尺寸。
[0032]
上述光电吊舱在兼顾成像效果和稳定精度的同时,能够缩减整体结构的体积以及减少运行功耗。需要说明的是,光电吊舱的精度稳定是综合考虑了磁编码器、电机的选型及整体的体积、重量等因素,比如,俯仰舱1的驱动机构和方位舱2的驱动机构均为扁平的分离式力矩电机,磁编码器选用同轴式的磁编码器。
[0033]
如图3所示,俯仰从动轴系和俯仰主动轴系分别位于机芯组件14的左右两侧。
[0034]
俯仰从动轴系包括俯仰从动轴18、磁铁19、俯仰从动轴承110、俯仰磁编码器芯片111、俯仰从动轴座112、密封板113、俯仰板114和螺钉紧固件。
[0035]
其中,俯仰从动轴座112上设置定位柱,俯仰板114上设置有与俯仰从动轴座112的定位柱配合的定位孔,通过螺钉将俯仰板114固定在俯仰从动轴座112。俯仰从动轴18为d形
轴,与外壳21的d形孔配合,通过螺钉俯仰从动轴18固定在外壳21;磁铁19为径向充磁强磁铁19,磁铁19通过胶水粘接于俯仰从动轴18的内部,磁铁19与俯仰板114上设置的俯仰磁编码器芯片111正对,通过校准标定后,俯仰磁编码器芯片111利用霍尔效应能检测出与其相对磁铁19的角度。
[0036]
具体地,俯仰从动轴承110的内圈与俯仰从动轴18配合,外圈与俯仰从动轴座112配合,俯仰舱1绕俯仰转动轴线转动时,俯仰磁编码器芯片111相对磁铁19发生转动,利用俯仰磁编码器芯片111和磁铁19检测出俯仰舱1相对俯仰转动轴线的转动角度。
[0037]
为了保证密封作用,俯仰板114和磁铁19之间设有密封板113,密封板113可以通过胶水粘接在俯仰从动轴座112的内部,起密封作用。
[0038]
此外,俯仰从动轴系通过螺钉固定在中框16上,俯仰从动轴座112上设置有凹槽,用于放置密封圈以密封俯仰从动轴系和中框16的配合面。
[0039]
俯仰主动轴系包括端盖115、俯仰主动轴座116、俯仰电机线圈117、俯仰主动轴承118、俯仰电机转子119、俯仰主动轴120及紧固件。
[0040]
其中,俯仰电机转子119通过螺钉固定在俯仰主动轴120上,俯仰电机线圈117与俯仰主动轴座116配合,端盖115用于保证密封性,端盖115可以通过螺钉固定在俯仰主动轴座116上并压紧俯仰电机线圈117的端面。端盖115上设置有刚好够俯仰电机线圈117的电线穿过的过线孔,俯仰电机线圈117的电线穿过端盖115上过线孔穿出俯仰主动轴系,并在过线孔处灌胶、密封。
[0041]
需要说明的是,俯仰板114、机芯组件14、俯仰电机线圈117的电线在俯仰舱1内汇总后可以通过端盖115的中间过线孔引出形成俯仰舱出线121,并在端盖115的中间过孔处灌胶、密封。
[0042]
此外,俯仰主动轴承118的外圈与俯仰主动轴座116配合,俯仰主动轴承118的内圈与俯仰主动轴120配合。俯仰主动轴系通过螺钉固定在中框16上,通过工装保证与俯仰从动轴系同轴,端盖115、俯仰主动轴座116、俯仰电机线圈117随着中框16一起绕俯仰转动轴线转动。俯仰主动轴座116与端盖115配合的端面上设置有凹槽,用于放置密封圈以密封配合面。
[0043]
在上述基础上,机芯组件14具体为双光机芯组件14,机芯组件14包括用于采集红外图像的红外组件和用于采集可见光图像的可见光组件,且红外组件的光轴与可见光组件的光轴平行。
[0044]
具体地说,双光机芯组件14上设置有红外探测器、高清可见光传感器及红外镜头、可见光镜头。双光机芯组件14上设置有法兰,使用四颗螺钉固定在中框16,并通过打磨调整法兰厚度或在法兰与中框16垫薄片,使得红外光轴、可见光光轴与俯仰转动轴垂直。
[0045]
更加具体地说,除了上述结构外,俯仰舱1还包括设于机芯组件14的外部的前壳13,前壳13设有分别与红外组件和可见光组件对应设置的红外窗口11和可见光窗口12。为了保证密封性,红外窗口11和可见光窗口12均与前壳13通过打胶实现密封。
[0046]
俯仰舱1通过窗口镜打胶密封、密封板打胶密封、配合面加硅胶圈密封、出线口灌胶等几种方式,将机芯组件14、俯仰板114密封在俯仰舱1内,防止外部水汽进入。
[0047]
俯仰舱1还包括俯仰配重块15、中框16、后壳17。其中,中框16上设置有过孔,螺钉依次穿过后壳17、中框16,将前壳13和后壳17固定在中框16上。
[0048]
需要注意的是,中框16与前壳13配合的配合面上以及中框16与后壳17配合的配合面上均设置有凹槽,用于放置密封圈以密封配合面。
[0049]
后壳17与机芯组件14的图像处理芯片之间设置有导热垫,机芯组件14的法兰与中框16的接触面上设置有导热硅脂,用于将双光机芯组件14产生的热量导出。
[0050]
俯仰配重块15通过螺钉固定在中框16上,通过调整俯仰配重块15的重量微调俯仰舱1的重心,使得俯仰舱1落在俯仰转动轴线上。
[0051]
外壳21和中框16上设置有限位凸台,用于限定俯仰舱1绕俯仰转动轴转动的角度在一定范围。
[0052]
下面介绍方位舱2的结构。
[0053]
如图2和图3所示,方位舱2包含外壳21、驱动板22、方位磁编码器芯片23、方位上盖24、方位舱侧支架25、方位舱侧支盖板26、密封件、紧固件等。驱动板22上设置有方位磁编码器芯片23,驱动板22设置有定位孔,用于与方位上盖24上的定位柱配合,通过螺钉将驱动板22固定在方位上盖24上。方位上盖24通过螺钉固定在外壳21上,方位上盖24与外壳21配合的配合面上设置有凹槽,用于放置密封圈以密封配合面。
[0054]
方位舱侧支架25上设置有与俯仰主动轴120配合的孔,通过螺钉分别与俯仰主动轴120、外壳21固定,并与外壳21形成u形支架支承俯仰舱1转动。
[0055]
通过外部工装微调方位舱侧支架25的位置,使得俯仰转动轴线、光轴分别与方位转动轴线垂直,然后锁紧方位舱侧支架25与外壳21的固定螺钉并打上防冲击载荷的定位销钉。方位舱侧支盖板26设置有方位舱侧支架25配合的卡扣,并通过一颗螺钉固定在方位舱侧支架25,用于遮挡俯仰舱出线121。
[0056]
同时,方位舱侧支架25和外壳21上设置有刚好够俯仰舱出线121通过过线孔,俯仰舱出线121通过过线孔进入方位舱2连接到驱动板22上后,通过灌胶密封该过线孔。方位舱侧支架25与外壳21配合的配合面上设置有凹槽,用于放置密封圈密封配合面。
[0057]
驱动板22用于驱动方位舱2内的驱动机构(方位电机)和俯仰舱1内的驱动机构(俯仰电机)转动,控制双光机芯组件14光轴的指向,并抵消载体抖动对双光机芯组件14成像的影响,实现稳像控制。
[0058]
方位舱2通过配合面加硅胶圈密封、出线口灌胶密封、迷宫式动密封等几种方式,将驱动板22密封在方位舱1内,防止外部喷水进入。良好的防水、防尘效果提高了吊舱的适用场景,并提高舱内轴承、电机、电子元器件的适用寿命。
[0059]
如图2和图3,安装座3包含码盘端盖31、码盘32、码盘支架33、方位电机转子34、方位电机线圈35、方位轴座36、安装座出线37、接口板38、外罩39、方位电机端盖310、方位轴承311、方位轴承端盖312、方位轴313和密封件、紧固件等。
[0060]
方位轴313系由码盘端盖31、码盘32、码盘支架33、方位电机转子34、方位电机线圈35、方位轴座36、方位电机端盖310、方位轴承311、方位轴承端盖312、方位轴313和密封件、紧固件构成。码盘32与码盘支架33的轴孔配合,码盘32通过码盘端盖31的外螺纹固定在码盘支架33的内螺纹上。方位电机转子34与方位轴座36的轴孔配合,螺钉依次通过方位轴座36、方位电机转子34将码盘支架33和方位电机转子34固定在方位轴座36,并通过工装使得方位轴座36、方位电机转子34、码盘支架33同轴后锁紧螺钉。方位轴313的内侧与方位电机线圈35的轴孔配合,方位轴313的外侧与方位轴座36的内圈轴孔配合,方位轴座36的外圈与
方位轴座36的轴孔配合,通过方位电机端盖310将方位轴承311的内圈和方位电机线圈35压紧在方位轴313上。方位轴承端盖312将方位轴承311的外圈压紧在方位轴座36,方位轴承端盖312与方位轴承311的外圈配合的配合面上设置有凹槽,用于放置密封圈密封配合面。方位轴313通过螺钉与方位上盖24固定,方位上盖24与方位轴313配合的配合面上设置有凹槽,用于放置密封圈密封配合面。方位轴承端盖312和方位上盖24上均设置有裙边,两者配合形成迷宫,通过注入油脂形成动密封。方位轴313通过方位上盖24带动方位舱2绕方位转动轴线转动,并通过码盘32与方位磁编码器芯片23配合,根据霍尔效应检测方位舱2绕方位转动轴线的转动角度。
[0061]
方位电机线圈35的出线接到驱动板22,方位电机线圈35的出线和俯仰舱出线121汇总到驱动板22后形成方位舱出线314,依次通过驱动板22中间过孔、码盘端盖31、码盘支架33、方位电机转子34、方位轴座36连接到接口板38上,然后通过安装座出线37与光电吊舱搭载载体连接。接口板38通过螺钉固定在方位轴座36上,方位轴座36与接口板38配合的配合面上设置有凹槽,用于放置密封圈密封配合面。外罩39通过螺钉固定在方位轴座36上,并通过工装使得两者同轴,外罩39预留有与光电吊舱搭载载体连接的螺钉孔。
[0062]
外罩39和方位上盖24上设置有限位凸台,用于限定方位舱2绕方位转动轴转动的角度在一定范围。
[0063]
需要说明的是,在本说明书中,诸如第一和第二之类的关系术语仅仅用来将一个实体与另外几个实体区分开来,而不一定要求或者暗示这些实体之间存在任何这种实际的关系或者顺序。
[0064]
以上对本实用新型所提供的光电吊舱进行了详细介绍。本文中应用了具体个例对本实用新型的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本实用新型的方案及其核心思想。应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以对本实用新型进行若干改进和修饰,这些改进和修饰也落入本实用新型权利要求的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1