一种无人机航拍的可收纳式摄像装置的制作方法
1.本实用新型涉及无人机技术领域,具体涉及一种无人机航拍的可收纳式摄像装置。
背景技术:
2.无人机航拍摄影是以无人驾驶飞机作为空中平台,以机载遥感设备,如高分辨率ccd数码相机、轻型光学相机、红外扫描仪,激光扫描仪、磁测仪等获取信息,用计算机对图像信息进行处理,并按照一定精度要求制作成图像。
3.现有的无人机航拍用摄像装置通过固定的方式固定在无人机机身的外部,在使用过程中容易对摄像装置造成损坏,因此,需要对现有的摄像装置进行改进。
技术实现要素:
4.针对现有技术中的缺陷,本实用新型提供的一种无人机航拍的可收纳式摄像装置,方便摄像机的角度进行调节;便于对摄像机进行收纳和保护。
5.为了解决上述技术问题,本实用新型提出以下技术方案:
6.一种无人机航拍的可收纳式摄像装置,包括用于收纳摄像机的壳体,所述壳体通过连接件与无人机机身固定连接,壳体的内部设有升降板和用于驱动升降板升降的第一驱动机构,第一驱动机构与壳体固定连接,升降板与壳体滑动连接,升降板上设有摄像机和用于驱动摄像机转动的第二驱动机构,第二驱动机构与升降板固定连接,所述壳体与摄像机对应的位置开设有开口,摄像机、第一驱动机构和第二驱动机构均与控制器电连接。
7.进一步地,所述第一驱动机构包括第一驱动电机和螺纹杆,第一驱动电机与壳体固定连接,第一驱动电机和螺纹杆同轴连接,螺纹杆与升降板螺纹连接,螺纹杆的底端与壳体转动连接,第一驱动电机与控制器电连接。
8.进一步地,所述壳体的内侧壁上对称地开设有滑槽,升降板的边缘置于滑槽。
9.进一步地,所述第一驱动电机的输出轴上同轴连接有第一主动齿轮,所述壳体靠近开口的位置转动设置有第一转轴,第一转轴上同轴连接有第一从动齿轮,第一主动齿轮和第一从动齿轮啮合,开口上覆盖有挡板,挡板通过连接杆与第一转轴的底端固定连接。
10.进一步地,所述第二驱动机构包括第二驱动电机和第二转轴,第二驱动电机与升降板固定连接,第二转轴与升降板转动连接,第二驱动电机的输出轴上同轴连接有第二主动齿轮,所述第二转轴上同轴连接有第二从动齿轮,第二主动齿轮和第二从动齿轮啮合,第二驱动电机与控制器电连接,摄像机与第二转轴的底端固定连接。
11.进一步地,所述连接件为t型连接块,t型连接块与壳体固定连接,t型连接块的两端分别开设有螺纹孔。
12.由上述技术方案可知,本实用新型的有益效果:在使用过程中,通过控制器控制第一驱动机构带动升降板下降,升降板下降带动第二驱动机构和摄像机下降,使摄像机从开口处移动到壳体的下方,便于进行使用,并通过第二驱动机构带动摄像机进行转动,方便摄
像机的角度进行调节;当不需要使用摄像机时,通过控制器控制第一驱动机构工作带动升降板上升,升降板上升带动第二驱动机构和摄像机上升,使摄像机从开口移动到壳体的内部,便于对摄像机进行收纳和保护。
附图说明
13.为了更清楚地说明本实用新型具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍。在所有附图中,类似的元件或部分一般由类似的附图标记标识。附图中,各元件或部分并不一定按照实际的比例绘制。
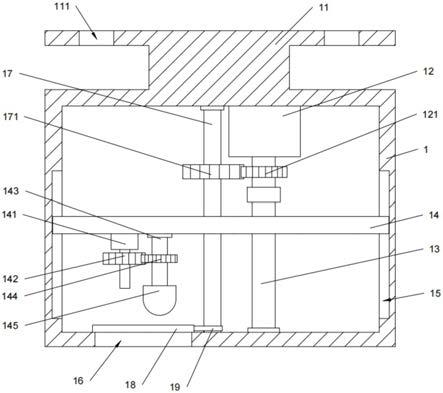
14.图1为本实用新型外的剖视图。
15.附图标记:
[0016]1‑
壳体;
[0017]
11
‑
t型连接块;12
‑
第一驱动电机;13
‑
螺纹杆;14
‑
升降板;15
‑
滑槽;16
‑
开口;17
‑
第一转轴;18
‑
挡板;19
‑
连接杆;
[0018]
111
‑
螺纹孔;121
‑
第一主动齿轮;141
‑
第二驱动电机;142
‑
第二主动齿轮;143
‑
第二转轴;144
‑
第二从动齿轮;145
‑
摄像机;171
‑
第一从动齿轮。
具体实施方式
[0019]
下面将结合附图对本实用新型技术方案的实施例进行详细的描述。以下实施例仅用于更加清楚地说明本实用新型的技术方案,因此只作为示例,而不能以此来限制本实用新型的保护范围。
[0020]
参阅图1所示,本实施例提供的一种无人机航拍的可收纳式摄像装置,包括用于收纳摄像机145的壳体1,壳体1通过连接件与无人机机身固定连接,壳体1的内部设有升降板14和用于驱动升降板14升降的第一驱动机构,第一驱动机构与壳体1固定连接,升降板14与壳体1滑动连接,升降板14上设有摄像机145和用于驱动摄像机145转动的第二驱动机构,第二驱动机构与升降板14固定连接,壳体1与摄像机145对应的位置开设有开口16,摄像机145、第一驱动机构和第二驱动机构均与控制器电连接。控制器可选用无人机内部的控制器或者另外设置控制器,另外设置的控制器为stm单片机。
[0021]
在实际使用中,在使用过程中,通过控制器控制第一驱动机构带动升降板14下降,升降板14下降带动第二驱动机构和摄像机145下降,使摄像机145从开口16处移动到壳体1的下方,便于进行使用,并通过第二驱动机构带动摄像机145进行转动,方便摄像机145的角度进行调节;当不需要使用摄像机145时,通过控制器控制第一驱动机构工作带动升降板14上升,升降板14上升带动第二驱动机构和摄像机145上升,使摄像机145从开口16移动到壳体1的内部,便于对摄像机145进行收纳和保护。
[0022]
在本实施例中,第一驱动机构包括第一驱动电机12和螺纹杆13,第一驱动电机12与壳体1固定连接,第一驱动电机12和螺纹杆13同轴连接,螺纹杆13与升降板14螺纹连接,螺纹杆13的底端与壳体1转动连接,第一驱动电机12与控制器电连接。
[0023]
在实际使用中,通过控制器控制第一驱动电机12工作带动螺纹杆13正反向转动,螺纹杆13正反向转动带动升降板14升降,升降板14升降带动第二驱动机构和摄像机145升
降。
[0024]
在本实施例中,壳体1的内侧壁上对称地开设有滑槽15,升降板14的边缘置于滑槽15,升降板14在滑槽15内滑动,增强升降板14升降过程中的稳定性。
[0025]
在本实施例中,第一驱动电机12的输出轴上同轴连接有第一主动齿轮121,壳体1靠近开口16的位置转动设置有第一转轴17,第一转轴17上同轴连接有第一从动齿轮171,第一主动齿轮121和第一从动齿轮171啮合,开口16上覆盖有挡板18,挡板18通过连接杆19与第一转轴17的底端固定连接。
[0026]
在实际使用中,第一驱动电机12工作带动升降板14以及摄像机145下降的过程中,第一驱动电机12带动第一主动齿轮121转动,第一主动齿轮121带动第一从动齿轮171转动,第一从动齿轮171转动带动第一转轴17转动,第一转轴17转动带动连接杆19以及挡板18远离开口16,便于摄像机145从开口16移动到壳体1的外部;第一驱动电机12工作带动升降板14以及摄像机145上升的过程中,第一驱动电机12带动第一主动齿轮121反向转动,第一主动齿轮121带动第一从动齿轮171反向转动,第一从动齿轮171转动带动第一转轴17反向转动,第一转轴17反向转动带动连接杆19以及挡板18靠近开口16,并对开口16进行遮挡,避免灰尘从开口16进入壳体1的内部。
[0027]
在本实施例中,第二驱动机构包括第二驱动电机141和第二转轴143,第二驱动电机141与升降板14固定连接,第二转轴143与升降板14转动连接,第二驱动电机141的输出轴上同轴连接有第二主动齿轮142,第二转轴143上同轴连接有第二从动齿轮144,第二主动齿轮142和第二从动齿轮144啮合,第二驱动电机141与控制器电连接,摄像机145与第二转轴143的底端固定连接。
[0028]
在实际使用中,第二驱动电机141转动带动第二主动齿轮142转动,第二主动齿轮142转动,带动第二从动齿轮144转动,第二从动齿轮144转动带动第二转轴143转动,第二转轴143转动带动摄像机145的转动,便于调节摄像机145的角度。
[0029]
在本实施例中,连接件为t型连接块11,t型连接块11与壳体1固定连接,t型连接块11的两端分别开设有螺纹孔111,t型连接块11通过螺栓与无人机机身固定连接。
[0030]
最后应说明的是:以上各实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述各实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的范围,其均应涵盖在本实用新型的权利要求和说明书的范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1