旋翼机的制作方法
1.本实用新型涉及一种旋翼机。
背景技术:
2.近年来,利用被用于各种用途的无人机(drone)、无人飞行器(uav:unmanned aerial vehicle)等飞行体的服务的利用场合正在扩大。其中,通过旋翼得到升力的旋翼机受到关注。在各种产业中利用旋翼机等飞行体时,要求运用效率高的机体。
3.作为这样的无人飞行体,例如,在专利文献1中公开了使升力的中心和连接部的中心、以及无人飞行体的重心在规定位置上的无人飞行体。
4.现有技术文献
5.专利文献
6.专利文献1:国际公开第2016/185572号
技术实现要素:
7.实用新型所要解决的问题
8.在旋翼机的进一步的应用中,要求旋翼机长时间巡航和降低运用成本。即,要求进一步改善这种旋翼机的运用效率。
9.因此,本公开是鉴于上述问题而完成的,其目的在于提供一种能够提高旋翼机巡航中的运用效率的旋翼机。
10.用于解决问题的方案
11.根据本公开,提供一种旋翼机,其具备:主体;以及多个马达,其设置在所述主体上,用于使各个旋翼旋转,其中,在所述主体相对于与基准面大致平行的一个行进方向倾斜并向所述行进方向飞行时,所述多个马达各自的旋转速度大致相同。
12.实用新型的效果
13.根据本实用新型,能够提高旋翼机巡航中的运用效率。
附图说明
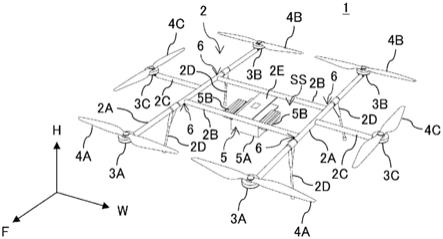
14.图1是示出本公开的第一实施方式所涉及的旋翼机1的结构的一个例子的立体图。
15.图2是示出该实施方式所涉及的旋翼机1的结构的一个例子的平面图。
16.图3是示出该实施方式所涉及的旋翼机1的结构的一个例子的侧视图。
17.图4是示出该实施方式所涉及的旋翼机1巡航时的飞行形态的一个例子的图。
18.图5是示出该实施方式的第一变形例所涉及的旋翼机10的结构的一个例子的侧视图。
19.图6是示出该变形例所涉及的旋翼机10巡航时的飞行形态的一个例子的图。
20.图7是示出该实施方式的第二变形例所涉及的旋翼机11的结构的一个例子的侧视图。
21.图8是示出该变形例所涉及的旋翼机11巡航时的飞行形态的一个例子的图。
22.图9是示出本公开的第二实施方式所涉及的旋翼机12的结构的一个例子的侧视图。
23.图10是示出本公开的第三实施方式所涉及的旋翼机13的结构的一个例子的侧视图。
24.图11是示出本公开的第四实施方式所涉及的旋翼机14的结构的一个例子的侧视图。
25.图12是示出本公开的第五实施方式所涉及的旋翼机15的结构的一个例子的侧视图。
26.图13是示出本公开的一个实施方式所涉及的旋翼机的功能结构的一个例子的框图。
27.附图标记说明
28.1旋翼机;2主体;2a、2b框架;3a前方马达;3b后方马达;4a前方旋翼;4b后方旋翼;5搭载部;5a壳体;5b蓄电池。
具体实施方式
29.以下,参照附图对本公开的优选实施方式进行详细说明。另外,在本说明书和附图中,对于实质上具有相同的功能结构的构成要素,标注相同的附图标记而省略重复说明。
30.首先,参照附图对本公开的第一实施方式进行说明。在此,为了便于说明而使用小型的无人旋翼机,但该无人旋翼机只是例示,并不限定飞行体的形态。例如,旋翼机可以是有人机或无人机。
31.图1是示出本公开的第一实施方式所涉及的旋翼机1的结构的一个例子的立体图。此外,图2是示出本实施方式所涉及的旋翼机1的结构的一个例子的平面图。此外,图3是示出本实施方式所涉及的旋翼机1的结构的一个例子的侧视图。另外,在本说明书中,方向f是指旋翼机1的前后方向(+方向为前方,-方向为后方),方向w是指旋翼机1的宽度方向,方向h是指旋翼机1的高度方向。另外,方向f的+方向是指旋翼机1巡航时的行进方向。巡航是指旋翼机1在空中沿着至少包括水平方向的分量方向飞行的状态。其中,行进方向是指水平方向的分量的方向。此外,基准面是指沿水平方向例如地面、水面等延伸的面。即,行进方向是与此基准面大致平行的方向。
32.如图1-图3所示,本实施方式所涉及的旋翼机1具备主体2、马达3(3a、3b、3c)、旋翼4(4a、4b、4c)和搭载部5。
33.本实施方式所涉及的主体2由多个框架2a、2b、2c、腿部2d、以及用于搭载用于控制旋翼机1的飞行的未图示的飞行控制器的基座2e构成。框架2a、2a沿旋翼机1的前后方向(行进方向)f延伸设置。框架2a、2a并行设置。在框架2a、2a的前端部和后端部分别设置有马达3a、3a和马达3b、3b。框架2b、2b在框架2a、2a的中央附近沿着宽度方向w设置,以架设框架2a、2a。框架2a、2a与框架2b、2b在多个连接点6处连接。由框架2a、2a、2b、2b和多个连接点6围成的空间是被围空间ss。被围空间ss由框架形成。在被围空间ss中,例如有时也设置搭载部5的至少一部分。
34.框架2c、2c与框架2a、2a连接,并向宽度方向外侧延伸设置。在框架2c、2c的与框架
2a、2a相反一侧的端部,分别设置有马达3c、3c。腿部2d、2d与框架2a、2a连接设置。该腿部2d也可以是框架2b、2b或框架2c、2c中的任一个。此外,也可以不设置腿部2d。基座2e例如以架设框架2b、2b的方式设置。该基座2e例如可以是为了支承搭载部5而设置的。另外,搭载部5也可以被支承在基座2e以外的主体2上的部分。例如,搭载部5的一部分或全部也可以与框架2a一体地设置。
35.马达3提供用于使旋翼4旋转的驱动力。马达3通过未图示的飞行控制器的控制从蓄电池5b获取能量。所设置的马达3的数量和位置没有特别限定。在本实施方式中,设置有前方马达3a、3a、后方马达3b、3b和侧方马达3c、3c。另外,马达3的构造和种类没有特别限定。此外,马达3可以通过未图示的马达支架与主体2连接。
36.旋翼4设置在马达3上,是用于获得旋翼机1的升力和推力的机构。旋翼4例如是螺旋桨形状的旋翼。所设置的旋翼4的数量和位置没有特别限定,例如可以根据所设置的马达3的数量和位置来确定。此外,设置在各个旋翼4上的叶片的数量没有特别限定。例如,旋翼4也可以是双反转螺旋桨等。在本实施方式中,设置有前方旋翼4a、4a、后方旋翼4b、4b和侧方旋翼4c、4c。
37.搭载部5是搭载于主体2的零件。搭载部5例如可包括壳体5a和蓄电池5b。另外,在本实施方式中,将壳体5a作为用于配送货物等的壳体的一个例子进行说明,但本技术并不限定于该例子。例如,搭载部5可包括用于进行照相机、构造物的检修等的传感器和致动器、以及能够搭载于主体2的物体。此外,构成搭载部5的物体也可以是单个或多个。蓄电池5b是能量源的一个例子,可以向马达3等提供电力。蓄电池5b的种类没有特别限定。此外,作为这样的能量源,也可以是蓄电池那样的电池以外的形态。此外,这些搭载部5可以与主体2可位移地连接设置,也可以固定设置在主体2上。
38.接着,参照图3,相对于行进方向(前后方向)f从侧方(即宽度方向w)观察,本实施方式所涉及的旋翼机1的重心g1与主体2的升力产生区域l1相比更靠下方且与主体2的中央位置c1相比更靠前方侧。在此,本实施方式所涉及的旋翼机1的重心g1是指主体2与搭载部5(包括蓄电池5b)的重心g1。此外,在本实施方式所涉及的旋翼机1中,升力产生区域l1是包含于各旋翼4的叶片的宽度(沿着图3中的高度方向h的长度)的区域。在此升力产生区域l1中,升力产生中心点(升力中心)l2可以基于各个旋翼4俯视时的位置而存在。在各个旋翼4的输出大致相同的情况下,升力中心l2存在于各个旋翼4俯视时的几何中心位置。
39.另外,例如,在各个旋翼4以按压型和拉动型的混合形式设置或者被设置为高度不同的情况下,升力产生区域l1可以定义如下。首先,获得各个马达3的旋转轴上的、旋翼4的叶片的宽度方向(旋翼机1的高度方向h)的上端和下端的位置。由与各旋转轴上的上端的位置分别对应的点群得到的最小二乘平面和由与各旋转轴上的下端的位置分别对应的点群得到的最小二乘平面夹着的空间可以定义为升力产生区域l1。此情况下的升力中心l2的位置与上述壳体相同。
40.此外,主体2的中央位置c1是指位于主体2的前后方向f上的前端与后端之间的中央的位置。
41.图4是示出本实施方式所涉及的旋翼机1巡航时的飞行形态的一个例子的图。图4所示的旋翼机1是相对于行进方向f倾斜地向行进方向f飞行的状态。旋翼机1的行进方向f是主体2的前后方向f。此时,旋翼机1的重心g1与升力产生区域l1相比更靠下方且与中央位
置c1相比更靠行进方向侧(前方侧)。
42.在以该姿势巡航的情况下,由于作为产生向高度方向h的升力的中心的升力中心l2与重心g1的位置关系,降低了旋翼机1上可能产生的俯仰力矩引起的马达3的负载偏差。因此,在旋翼机1相对于行进方向f倾斜的状态下,能够得到由前方旋翼4a产生的升力f1和由后方旋翼4b产生的升力f2一致的状态。于是,马达3a与马达3b的转速大致一致。
43.另外,在不考虑该重心g1的位置的现有旋翼机中,为了旋翼机的巡航,需要使旋翼机倾斜,因此需要抬起旋翼机的后方,降低前方。在该情况下,需要使后方旋翼的升力大于前方旋翼的升力。于是,后方马达的转速变大,前方旋翼的转速变小。这样,可以产生马达的转速的偏差。
44.在本实施方式所涉及的旋翼机1中,在巡航时使旋翼机1向行进方向f倾斜的情况下,能够使前方马达3a与后方马达3b的转速大致相等。由此,能够抑制由巡航时马达的转速的差引起的蓄电池的消耗量(即能量消耗量)的偏差。由此,例如能够进一步延长巡航时间。此外,对马达的负荷也能均质化,能够更高效地进行马达的运用。因此,能够提高旋翼机巡航中的运用的效率。
45.另外,搭载部5的壳体5a和蓄电池5b相对于主体2设置的位置没有特别限定。只要能够设定上述重心g1的位置,则搭载部5的设置位置、大小、重量和方式没有特别限定。
46.接着,对本实施方式的变形例进行说明。图5是示出本实施方式的第一变形例所涉及的旋翼机10的结构的一个例子的侧视图。在本变形例中,相对于行进方向f(前后方向)从侧方观察,旋翼机10的重心g2的位置包含在升力产生区域l1内,且位于主体2的中央位置c1。重心g2的位置可以与升力中心l2大致一致。该重心g2的位置例如可以通过调整主体2的结构、搭载部50的内容物和设置位置等来变更。旋翼机10的其他结构与上述实施方式相同。另外,“位于主体2的中央位置c1”是指与中央位置c1大致一致。大致一致是指重心g2在前后方向f上位于距中央位置c1前后3cm以内。
47.图6是示出本变形例所涉及的旋翼机10巡航时的飞行形态的一个例子的图。在旋翼机10相对于行进方向f的倾斜为恒定的状态下飞行时,由于难以产生绕重心g2的力矩,因此前方旋翼4a和后方旋翼4a产生的升力f1、f2大致相同。因此,能够使前方马达3a与后方马达3b的转速大致相等。由此,能够抑制由巡航时马达的转速的差引起的蓄电池的消耗量的偏差。
48.图7是示出本实施方式的第二变形例所涉及的旋翼机11的结构的一个例子的侧视图。在本变形例中,相对于行进方向f(前后方向)从侧方观察,旋翼机11的重心g3的位置与升力产生区域l1相比更靠上侧且与主体2的中央位置c1相比更靠与行进方向f相反一侧(即后侧)。旋翼机11的其他结构与上述实施方式相同。另外,搭载部51设置于主体2的上部,但是搭载部51的设置位置没有特别限定。
49.图8是示出本变形例所涉及的旋翼机11巡航时的飞行形态的一个例子的图。在旋翼机11相对于行进方向f的倾斜为恒定的状态下飞行的时,由于作为产生向高度方向h的升力的中心的升力中心l2与重心g3的位置关系,降低了旋翼机1上可能产生的俯仰力矩引起的马达3的负载偏差。因此,在旋翼机1相对于行进方向f倾斜的状态下,能够得到由前方旋翼4a产生的升力f1和由后方旋翼4b产生的升力f2一致的状态。于是,马达3a与马达3b的转速大致一致。
50.这样,通过将旋翼机1的重心的位置设为上述那样的位置,能够在旋翼机1的巡航中使各个马达3的转速平均化。由此,能够抑制马达3的输出和与之相伴的影响的偏差。因此,可以使旋翼机1在长距离飞行等中的运用更为高效。
51.接着,对本公开的第二实施方式进行说明。图9是示出本公开的第二实施方式所涉及的旋翼机12的结构的一个例子的侧视图。本实施方式所涉及的旋翼机12与第一实施方式所涉及的旋翼机1不同,作为搭载部52将蓄电池5b搭载在主体2上。其余的部分与第一实施方式所涉及的旋翼机1相同。旋翼机12的重心g4是主体2与蓄电池5b的重心。
52.如图9所示,重心g4的位置包含在升力产生区域l1内,且位于主体2的中央位置c1。重心g4的位置可以与升力中心l2大致一致。在该情况下,与第一实施方式的第一变形例相同,在旋翼机12相对于行进方向f的倾斜为恒定的状态下飞行时,由于难以产生绕重心g4的力矩,因此前方旋翼4a和后方旋翼4a产生的升力f1、f2大致相同。因此,能够使前方马达3a与后方马达3b的转速大致相等。
53.在该旋翼机12中,也可以适当地搭载另外搭载货物等的壳体、照相机、传感器或者致动器等。在该情况下,这些搭载物可以连接设置在主体2上。此外,搭载物可以与主体2可位移地连接设置,也可以固定设置在主体2上。例如,在搭载物与主体2可位移地连接设置的情况下,能够控制搭载物的重心的位置。因此,能够分别控制主体2和蓄电池5b的重心g4(即旋翼机12的重心)的位置和搭载物的重心的位置。因此,不论搭载物的种类和形状等如何,都能够实现各个马达3的转速的平均化。
54.接着,对本公开的第三实施方式进行说明。图10是示出本公开的第三实施方式所涉及的旋翼机13的结构的一个例子的侧视图。本实施方式所涉及的旋翼机13与第一实施方式所涉及的旋翼机1不同,框架2a后侧臂的长度比前侧臂的长度短。
55.如果详细地进行说明,首先,相对于行进方向f从侧方观察,本实施方式所涉及的旋翼机13的重心(即,作为主体2和搭载部5的一个例子的蓄电池5b的重心)g5与主体2的中央位置c2相比更靠行进方向侧。此外,重心g5与升力产生区域l1相比更靠下方,此外,将形成被围空间ss的框架2a部分(连接点6、6之间的部分)的、相对于行进方向f从侧方观察到的中心位置作为基准位置g3,前方马达3a与基准位置c3的距离d1比后方马达3a与基准位置c3的距离d2更长。
56.在这样的非对称的主体2的结构中,也同样地,在旋翼机13巡航时的倾斜姿态下,能够使前方马达3a和后方马达3b的转速平均化。
57.接着,对本公开的第四实施方式进行说明。图11是示出本公开的第四实施方式所涉及的旋翼机14的结构的一个例子的侧视图。本实施方式所涉及的旋翼机14从第一实施方式所涉及的旋翼机1的主体2向后方设置框架2f,在框架2f上设置有作为空气动力零件的一个例子的翼7。框架2f例如与后侧框架2b连接,可以沿着行进方向f向后方延伸。翼7可以是固定翼或活动翼。
58.翼7被设置为在旋翼机14巡航时相对于行进方向f倾斜时,可以受到来自前方的气流而产生升力。通过翼7产生相对于旋翼机14的升力,从而能够向旋翼机14的后方追加升力。于是,能够降低后方马达3b的负荷。由此,能够使前方马达3a与后方马达3b的转速平均化。另外,如果翼7为活动翼,则能够调整升力的大小。于是,即使在任意的俯仰角的倾斜的状态下,也能够使前方马达3a与后方马达3b的转速平均化。
59.另外,安装翼7的位置没有特别限定,但相对于行进方向f从侧方观察,优选地,翼7沿着行进方向f设置于与主体2的中央位置c1(框架2a的前端与后端之间的中央)相比更靠后方侧。通过在后方侧得到升力,容易获得转速的平均化的效果。进一步优选地,翼7沿着行进方向f设置于与任一马达3相比更靠后方侧。由此,能够进一步抑制施加在旋翼机14上的俯仰力矩的影响。
60.接着,对本公开的第五实施方式进行说明。图12是示出本公开的第五实施方式所涉及的旋翼机15的结构的一个例子的侧视图。在本实施方式所涉及的旋翼机15中,前方马达3a设置为能够绕俯仰轴p1旋转。能够绕俯仰轴p1旋转的范围没有特别限定。
61.根据该结构,在旋翼机15巡航时,前方马达3a能够绕俯仰轴向前倾斜。于是,在由前方旋翼4a和后方旋翼4b产生的升力的矢量中,能够使行进方向f的分量和高度方向h的分量不同。于是,即使在前方马达3a与后方马达3b的转速一致(即得到的升力的大小一致)的情况下,也能够维持旋翼机15相对于行进方向f倾斜的状态。即,能够一边使前方马达3a与后方马达3b的转速平均化,一边向行进方向f飞行。
62.此外,在图12所示的例子中,前方马达3a设置为能够绕俯仰轴旋转,但本技术并不限定于该例。例如,后方马达3b和侧方马达3c等其他马达也可以设置为能够绕俯仰轴旋转。另外,各马达3除了可以设置为能够绕俯仰轴旋转以外,还可以设置为能够绕翻滚轴或绕偏航轴旋转。
63.以上,对本公开的多个实施方式所涉及的旋翼机进行了说明。另外,上述的实施方式仅是本公开的一个例子,本技术并不限定于各实施方式公开的旋翼机的结构。此外,上述多个实施方式公开的结构可以适当组合。例如,除了重心位置的控制以外,还可以应用上述翼和马达的绕俯仰轴的旋转机构等,实现马达的转速的平均化。
64.图13是示出本公开的一个实施方式所涉及的旋翼机的功能结构的一个例子的框图。如图13所示,一实施方式所涉及的旋翼机1在主体2中,除了马达3、螺旋桨(旋翼)4和蓄电池5b以外,还可以具备飞行控制器21、照相机/传感器类22、万向架23、esc24和收发部25。
65.飞行控制器21可以具有可编程处理器(例如中央处理器(cpu))等一个以上处理器。
66.飞行控制器21具有未图示的存储器,并且可以访问该存储器。存储器存储有为进行一个以上的步骤而能够由飞行控制器执行的逻辑、代码和/或程序指令。
67.存储器例如也可以包括sd卡、随机存取存储器(ram)等可分离的介质或外部存储装置。从照相机/传感器类22获取的数据也可以直接传递并存储到存储器中。例如,由照相机等拍摄的静止图像和动态图像数据被记录在内置存储器或外部存储器中。
68.飞行控制器21包括构成为控制飞行体的状态的控制模块。例如,控制模块通过esc(electric speed controller)24控制飞行体的推进机构(马达3等),以调整具有六自由度(平移运动x、y和z、以及旋转运动θ
x
、θy和θz)的飞行体的空间配置、速度和/或加速度。控制模块能够控制搭载部、传感器类的状态中的一个以上。
69.飞行控制器21能够与收发部25进行通信,该收发部25构成为发送和/或接收来自一个以上外部设备(例如终端、显示装置或其他远程控制器)的数据。收发器(遥控器)26能够使用有线通信或无线通信等任意适当的通信方式。
70.例如,收发部25能够利用局域网(lan)、广域网(wan)、红外线、无线、wifi、点对点
(p2p)网络、电信网络、云通信等中的一种以上。
71.收发部25能够发送和/或接收由照相机/传感器类22获得的数据、飞行控制器21生成的处理结果、规定的控制数据、来自终端或远程控制器的用户命令等中一种以上。
72.本实施方式的照相机/传感器类22可以包括惯性传感器(加速度传感器、陀螺仪传感器)、gps传感器、接近传感器(例如雷达)或视觉/图像传感器(例如照相机)。
73.以上,参照附图对本公开的优选实施方式进行详细说明,但是本公开的技术范围并不限定于该例子。显然,本领域技术人员能够在权利要求书中记载的技术思想的范围内想到各种变更例或者修正例,关于这些,当然也属于本公开的技术范围。
74.此外,在本说明书中记载的效果仅仅是说明性和例示性的,而不是限制性的。即,与上述效果一起或代替上述效果,根据本公开所涉及的技术可以实现基于本说明书的描述对本领域技术人员显而易见的其他效果。
75.另外,以下构成也属于本公开的技术范围。
76.(项目1)
77.一种旋翼机,其具备:
78.主体;以及
79.多个马达,其设置在所述主体上,用于使各个旋翼旋转,其中,
80.在所述主体相对于与基准面大致平行的一个行进方向倾斜并向所述行进方向飞行时,所述多个马达各自的旋转速度大致相同。
81.(项目2)
82.根据项目1所述的旋翼机,其中,
83.相对于所述行进方向从侧方观察,所述旋翼机的重心的位置
84.与对所述旋翼机产生升力的升力产生区域相比更靠下侧,
85.并且与所述主体的中央位置相比更靠所述行进方向侧。
86.(项目3)
87.根据项目1所述的旋翼机,其中,
88.相对于所述行进方向从侧方观察,所述旋翼机的重心的位置
89.包括在对所述旋翼机产生升力的升力产生区域内,
90.并且位于所述主体的中央位置。
91.(项目4)
92.根据项目1所述的旋翼机,其中,
93.相对于所述行进方向从侧方观察,所述旋翼机的重心的位置
94.与对所述旋翼机产生升力的升力产生区域相比更靠上侧,
95.并且与所述主体的中央位置相比更靠与所述行进方向相反一侧。
96.(项目5)
97.根据项目1~4中任一项所述的旋翼机,其中,
98.所述主体由至少沿所述行进方向并行设置的框架形成。
99.(项目6)
100.根据项目5所述的旋翼机,还具备:
101.搭载于所述主体的搭载部,其中,
102.所述框架在中央形成被围空间,
103.所述搭载部设置于所述被围空间。
104.(项目7)
105.根据项目6所述的旋翼机,其中,
106.所述多个马达沿着所述行进方向包括前方马达和后方马达,
107.相对于所述行进方向从侧方观察,所述旋翼机的重心的位置与所述主体的中央位置相比更靠所述行进方向侧时,
108.将形成所述被围空间的框架部分的、相对于所述行进方向从侧方观察到的中心位置作为基准位置,在相对于所述行进方向从侧方观察时的所述前方马达与所述基准位置的距离比所述后方马达与所述基准位置的距离长。
109.(项目8)
110.根据项目1~7中任一项所述的旋翼机,还具备空气动力部件,其安装于所述主体,在所述飞行时产生与所述旋翼不同的升力。
111.(项目9)
112.根据项目8所述的旋翼机,其中,所述空气动力部件包括翼,其在由所述行进方向和上下方向构成的面内具有翼截面。
113.(项目10)
114.根据项目9所述的旋翼机,其中,相对于所述行进方向从侧方观察,所述翼沿着所述行进方向设置于与所述主体的中央位置相比更靠后方侧。
115.(项目11)
116.根据项目10所述的旋翼机,其中,相对于所述行进方向从侧方观察,所述翼沿着所述行进方向设置于与所述任一马达相比更靠后方侧。
117.(项目12)
118.根据项目1~11中任一项所述的旋翼机,其中,所述多个马达中的任一个设置为至少能够绕俯仰轴旋转。
119.(项目13)
120.根据项目12所述的旋翼机,其中,
121.所述多个马达沿着所述行进方向包括前方马达和后方马达,
122.所述前方马达设置为能够绕俯仰轴旋转。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1