一种无人机自动换电站用对中装置的制作方法
1.本实用新型属于无人机电池更换技术领域,尤其涉及一种无人机自动换电站用对中装置。
背景技术:
2.目前无人机在各个领域应用越来越广泛,也带动了无人机配套设备及服务行业的迅速发展,随着科学技术的进步与发展,人们的生活越来越智能化,无人机便是这一智能生活时代背景下的产物,特别是近年来,无人机技术发展势不可挡,凭借着其体积轻便、携带方便和易于使用等优点,无人机在工业生产和日常生活中的应用越来越广泛。
3.在无人机技术日趋发展的同时,由于电池电量的有限性,无人机无法实现远距离飞行和超长待机飞行,这就使得无人机电池的及时更换问题成为了相关技术领域所需要面对的首要问题。目前,对于无人机电池的更换都是手动进行,需要人工拆卸电池,再将电量充满的电池替换电量不足的电池以持续使用,而这种人工方式费时费力、操作繁琐,给实际的应用带来了诸多不便。
4.所以设计了一种能自动换电的无人机自动换电站,但是目前还缺少一种能够实现对无人机进行自动对中的装置。
技术实现要素:
5.本实用新型目的是为了克服现有技术的不足而提供一种结构简单,能够方便快捷的实现对无人机的对中,便于后续操作的无人机自动换电站用对中装置。
6.为达到上述目的,本实用新型采用的技术方案是:一种无人机自动换电站用对中装置,包括:
7.无人机,所述无人机的底部具有承重杆;
8.停机坪,所述停机坪上设有呈网状分布的容纳槽,所述停机坪用于承载无人机;
9.滚珠,所述滚珠可转动的设于所述容纳槽内;
10.两个横向推杆,两个所述横向推杆通过横向动力机构可在停机坪的横向上做反向运动;
11.两个竖向推杆,两个所述竖向推杆通过竖向动力机构可在停机坪的竖向上做反向运动;
12.其中,两个所述横向推杆和两个所述竖向推杆推动承载杆在停机坪的滚珠上进行对中移动。
13.进一步的,所述横向动力机构包括分别位于停机坪上下两端的两个横向驱动丝杆,所述横向驱动丝杆上设有可相对反向运动的第一传动件和第二传动件;两个所述横向驱动丝杆之间的动力通过传动轴进行传动,任意一个所述横向驱动丝杆上的第一传动件和第二传动件经由横向驱动丝杆电机驱动做反向运动;两个所述横向推杆的两端分别设于两个横向驱动丝杆上的第一传动件和第二传动件上。
14.进一步的,所述竖向动力机构包括分别位于停机坪左右两端的两个竖向丝杆,所述竖向丝杆上设有可相对反向运动的第三传动件和第四传动件;两个所述竖向丝杆之间的动力通过传动轴进行传动,任意一个所述竖向丝杆上的第三传动件和第四传动件经由竖向丝杆电机驱动做反向运动;两个所述竖向推杆的两端分别设于两个竖向丝杆上的第三传动件和第四传动件上。
15.进一步的,还包括定位传感器,所述定位传感器设于所述停机坪的中心处,用于感应位于停机坪上的无人机位置,并控制驱动横向动力机构和竖向动力机构。
16.由于上述技术方案的运用,本实用新型与现有技术相比具有下列优点:
17.本实用新型方案的无人机自动换电站用对中装置,整体结构简单,操作方便,当无人机进入到停机坪后,通过两个横向推杆和两个竖向推杆驱动承重杆在停机坪的滚珠上进行居中移动,可以快速精准的实现无人机进行的对中,符合市场的使用需求。
附图说明
18.下面结合附图对本实用新型技术方案作进一步说明:
19.附图1为无人机的立体结构示意图;
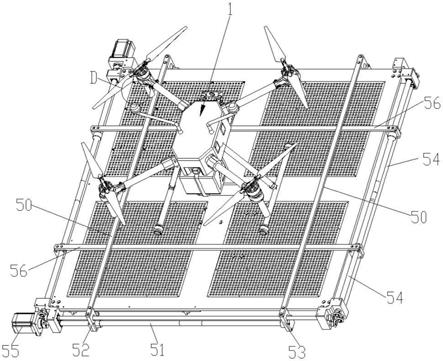
20.附图2为本实用新型的的立体结构示意图;
21.附图3为附图2中d部的放大图;
22.附图4为附图2的另一视角的立体结构示意图;
23.其中:无人机1、停机坪4、承重杆11、容纳槽41、滚珠42、横向推杆50、横向驱动丝杆51、第一传动件52、第二传动件53、传动轴54、横向驱动丝杆电机驱动55、竖向推杆56、竖向丝杆57、第三传动件58、第四传动件59、竖向丝杆电机500、定位传感器501。
具体实施方式
24.下面结合附图及具体实施例对本实用新型作进一步的详细说明。应当理解,此处所描述的具体实施例仅用以解释本实用新型,而不构成对本实用新型的限制。
25.请参阅附图1,所述无人机1的底部具有两个呈圆形状的承重杆11,当无人机停到停机坪4上时,两个承重杆11作为承重支点设置在所述停机坪4上。
26.请参阅附图2-4,作为进一步的优选实施例,所述无人机对中装置包括设置在停机坪4上的两个左右设置的横向推杆50和两个上下设置的竖向推杆56;两个所述横向推杆50之间通过横向动力机构在横向上做相对反向运动。
27.具体的,所述横向动力机构包括分别位于停机坪4上下两端的两个横向驱动丝杆51;位于停机坪4下端的横向驱动丝杆51经由横向驱动丝杆电机55驱动带动第一传动件52和第二传动件53在横向驱动丝杆51上做相对的反向运动。
28.因为两个横向驱动丝杆51之间通过传动轴54传动相连,所以另一个横向驱动丝杆上的第一传动件52和第二传动件53也同步在对应的横向驱动丝杆51上做反向运动。
29.并且一个横向推杆50的两端分别设于两个第一传动件52上,另一个横向推杆50的两端分别安装在第二个传动件53上,这样两个横向推杆50在横向驱动丝杆电机55驱动下做相对的反向运动,从而实现两个横向推杆50的靠近或远离。
30.两个所述竖向推杆56通过竖向动力机构在竖向上做相对反向运动;所述竖向动力
机构包括分别位于停机坪左右两端的两个竖向丝杆57,同时竖向丝杆上设有可相对反向运动的第三传动件58和第四传动件59;两个所述竖向丝杆之间的动力通过传动轴54进行传动,任意一个所述竖向丝杆上的第三传动件和第四传动件经由竖向丝杆电机500驱动做反向运动;两个所述竖向推杆56的两端分别设于两个竖向丝杆57上的第三传动件和第四传动件上;竖向推杆运行时的工作原理与横向推杆运行时的工作原理相同,只是一个为横向运动,一个为竖向运动。
31.工作时,无人机1进入到停机坪4上,接着两个横向推杆50和两个竖向推杆56通过横向驱动丝杆电机55和竖向丝杆电机500的驱动,分别对承重杆11的横向位置和竖向位置进行调整,最后使得无人机的位置能够处于停机坪4上设定的中间位置。
32.并且,所述停机坪4上还设有定位传感器501;工作时,定位传感器501感应到位于停机坪4上的无人机1位置时,控制驱动横向动力机构和竖向动力机构停止工作,此时,无人机1的居中定位完成。
33.另外,所述停机坪4上设有呈网状分布的容纳槽41,共分为四个区域,所述容纳槽41内设有可转动滚珠42;这样当无人机1的承重杆11由横向推杆和竖向推杆推动在停机坪4上进行横向和纵向移动时,承重杆11与滚珠42接触,从而能够更加快速有效的对无人机1的位置进行移动,不会出现无人机的位置卡死,或者摩擦力太大,从而导致无人机的移动不便以及移动位置不精的问题。
34.本实用新型的无人机自动换电站用对中装置,整体结构简单,操作方便,当无人机进入到停机坪后,通过两个横向推杆和两个竖向推杆驱动承重杆在停机坪的滚珠上进行居中移动,可以快速精准的实现无人机进行的对中,符合市场的使用需求。
35.以上仅是本实用新型的具体应用范例,对本实用新型的保护范围不构成任何限制。凡采用等同变换或者等效替换而形成的技术方案,均落在本实用新型权利保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1