一种用于小型无人航空器快捷挂装物资箱的制作方法
1.本实用新型涉及无人机挂装设备技术领域,更具体地说,涉及一种用于小型无人航空器快捷挂装物资箱。
背景技术:
2.小型无人航空器指代的是无人机飞行器,而无人机飞行器又多用于拍摄或者物料等领域;现有的无人机飞行器在运输时需要用到物资箱,而一般物资箱大多都是采用固定式设计,即通过将整个物资箱固定安装在无人机的底端处,当无人机飞行器到达运输终点时,就需要人工手动对整个物资箱进行拆装,这样在实际运用中就较为麻烦,且不便捷,并且还影响了无人机的输送效率,因此,基于以上问题,提出一种用于小型无人航空器快捷挂装物资箱。
技术实现要素:
3.(一)解决的技术问题
4.本实用新型针对上述背景技术中的缺陷,提供一种用于小型无人航空器快捷挂装物资箱,使得物资箱能够快速的从无人机飞行器处拆除,从而便于提升其物资箱的卸货便捷性。
5.(二)技术方案
6.本实用新型提供了一种用于小型无人航空器快捷挂装物资箱,包括物资箱主体和支架,支架固定设置于物资箱主体的左右侧端面处,支架的外侧端面处水平开设有活动槽,活动槽的内壁至支架的上下端面处垂直开设有转动槽,同时在转动槽的内壁处开设有推槽,并且在转动槽内部转动设置有转杆。
7.优选的:物资箱主体的上端方向处设置有连接架,并且连接架的顶端与“外界小型无人航空器”的底部端面固定相连接,同时小型无人航空器为无人机飞行器。
8.优选的:转动槽的内部转动设置有连接滑块,并且连接滑块的内侧端又与转杆的外侧端面固定相连接。
9.优选的:推槽为“半圆圈结构设置”,并且在推槽的后端方向处活动设置有推块,其中推块的外侧面与转杆的外侧端面固定相连接。
10.优选的:推槽的前端方向处固定设置有弹簧圈,并且弹簧圈的一端与推块固定相连接。
11.优选的:连接架的内侧面水平开设有开槽,并且开槽的前端面和后端面均分别延伸至支架的前后侧端面处,同时在开槽内壁中端处垂直开设有连接滑槽。
12.优选的:连接滑槽为“c形结构设置”,并且连接滑槽的一端水平且贯穿延伸至支架的内侧端面处。
13.优选的:连接滑块为“球拍形结构设置”,并且连接滑块的外侧端配套且滑动连接于连接滑槽内部。
14.优选的:转杆的底端面设置有拨动块。
15.有益效果:
16.1、这种用于小型无人航空器快捷挂装物资箱设置有支架、连接架、开槽、连接滑槽和连接滑块,使得连接滑块会滑向开槽处,这样方便物资箱能够与无人机处的连接架进行脱离。
17.2、这种用于小型无人航空器快捷挂装物资箱设置有活动槽、转动槽、推槽、弹簧圈、推块和转杆,使得到达开槽区域处的连接滑块能够发生转动,这样可以避免物资箱在拆除处可能发生卡主等情况。
18.附图说明:
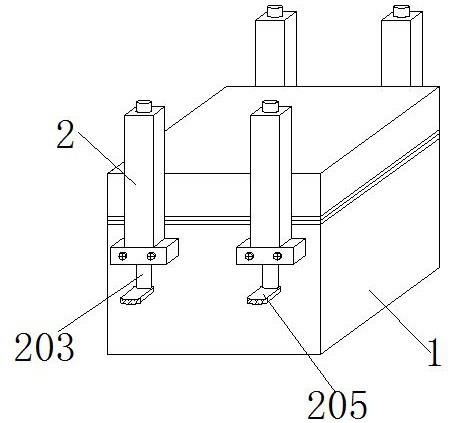
19.图1为本实用新型的一种用于小型无人航空器快捷挂装物资箱侧面示意图。
20.图2为本实用新型的物资箱主体与连接架正面连接剖视示意图。
21.图3为本实用新型的连接架局部侧面透视图。
22.图4为本实用新型的活动槽与转杆连接示意图。
23.图5为一种用于小型无人航空器快捷挂装物资箱图4中的a处剖视示意图。
24.图1-5中:1-物资箱主体;2-支架;201-活动槽;202-转动槽;2021-推槽;2022-弹簧圈;2023-推块;203-转杆;204-连接滑块;205-拨动块;3-连接架;301-开槽;302-连接滑槽。
具体实施方式
25.如附图1至附图5所示:本实用新型提供一种技术方案,一种用于小型无人航空器快捷挂装物资箱,包括物资箱主体1和支架2,支架2固定设置于物资箱主体1的左右侧端面处,物资箱主体1的上端方向处设置有连接架3,且连接架3的顶端与无人无人航空器的底部端面固定相连接,同时在连接架3的内侧面水平开设有开槽301,而在开槽301内壁中端处垂直开设有连接滑槽302。
26.如图1所示,在支架2的顶部至底部端面处转动设置有转杆203,同时在转杆203的底端面设置有拨动块205,通过拨动块205的设置,使得工作人员可握持拨动块205对转杆203施加旋转动力。
27.如图2和图3所示,开槽301的前端面和后端面均分别延伸至支架2的前后侧端面处,通过开槽301的布局设置,使得连接滑块204能够水平滑入至开槽301内部,同时连接滑槽302的一端水平且贯穿延伸至支架2的内侧端面处,并且连接滑块204的外侧端配套且滑动连接于连接滑槽302内部,这样使得连接滑块204的外侧端面可以滑入至连接滑槽302内部,滑入后就可以为物资箱主体1提供支撑点,从而就完成了无人航空器对物资箱的挂装工作。
28.如图4和图5所示,在支架2的外侧面水平开设有活动槽201,同时在活动槽201的内壁至支架2的上下端面处水平且贯通开设有转动槽202,而转杆203则贯穿且转连接于转动槽202内部,这样使得转杆203可在转动槽202内部进行转动,同时活动槽201的内部活动设置有连接滑块204,并且连接滑块204的内侧端又与转杆203的外侧端面固定相连接,这样使得转杆203可带动滑块204在活动槽201处做同轴运动,最后在转动槽202的内壁处开设有推槽2021,其中推槽2021的内部上端处滑动设置有推块2023,并且推块2023的外侧端面又与转杆203的外侧端面固定相连接,而推槽2021的内部下端处则固定设置有弹簧圈2022,并且
弹簧圈2022的一端与推块2023的外侧面固定相连接,这样使得转杆203在带动推块2023做旋转运动时,可以对弹簧圈2022进行挤压,所以当连接滑块204从连接滑槽302内部滑动时,其弹簧圈2022的弹力,使得转杆203会带动连接滑块204回转,这样可以将连接滑块204从开槽301区域处转出,转出后其支架2与连接架3之间就没有了连接支点,从而就完成了物资箱的挂装卸货工作。
29.工作原理:当无人机飞行器携带物资箱到达运输终点时,使得无人机飞行器逐渐向下运动,在这一过程中物资箱首先会与地面接触,物资箱到达地面后,让无人机持续向下运动,在这一过程中,通过支架2、连接架3、开槽301、连接滑槽302和连接滑块204的设置,使得连接滑块204会滑向开槽301处,这样方便物资箱能够与无人机处的连接架3进行脱离,由于物资箱处的支架2与无人机处的连接架3之间存在间距,所以当无人机飞行持续向下运动时,其物资箱处的连接滑块204就可以滑向至开槽301区域,这样就方便物资箱能够自动从连接架3处脱离,同时利用活动槽201、转动槽202、推槽、2021弹簧圈2022、推块2023和转杆203的布局设置关系,使得到达开槽301区域处的连接滑块204能够发生转动,这样可以避免物资箱在拆除处可能发生卡主等情况,由于转杆203、弹簧圈2022和推块2023的布局设置关系,使得当连接滑块204移动至开槽301区域后,会因为缺少阻隔而使得弹簧圈2022会推动推块2023在推槽2021内部滑动,滑动后其转杆203会带动连接滑块204运动,这样就使得连接滑块204会从连接架3的开槽301内部旋出,所以当无人机携带连接架3向上移动时,其连接架3就不会与连接滑块204发生接触等情况,从而就可以保障其物资箱的拆装稳定性。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1