一种空间多环闭链并联式柔性抓捕装置
1.本实用新型属于抓捕装置领域,涉及一种并联式抓捕装置,特别涉及一种空间多环闭链并联式柔性抓捕装置。
背景技术:
2.随着人类不断对太空探索和开发,太空任务的需求日益增多,空间抓捕技术作为实现在轨维修、组装空间站、空间救援等在轨服役也成为了当前研究的热潮,各国都开始对此类技术进行深入的探究。然而,以空间机械臂为主的刚性捕获存在较大的碰撞风险,以飞网式为主的柔性捕获方式难以执行在轨维修等复杂的精细操作任务。
3.并联机构具有刚度大、结构稳定以及承载能力强等诸多特性。并联机构可广泛应用于空间服役、机床加工和操作机械臂等领域,以并联机构为本体、六杆可缩放闭环机构充当其动平台来设计空间抓捕装置,可利用并联操作机构刚度大、承载能力强的优势来满足空间在轨任务对于抓捕动作的需求。
技术实现要素:
4.本实用新型是为解决上述问题,提出了一种适应多种目标和多种任务的空间多环闭链并联式柔性抓捕装置。
5.本实用新型所采用的技术方案有:一种空间多环闭链并联式柔性抓捕装置,其特征在于:包括定平台、六杆可缩放闭环机构以及连接两者的三条结构对称、各向同性运动支链,所述定平台安装在抓捕装置上端,所述每条运动支链包括一个主动支链和一个从动支链,主动支链与定平台通过第一转动副相连,主动支链与从动支链通过第二转动副相连,从动支链与六杆可缩放闭环机构通过复合铰链相连,六杆可缩放闭环机构安装在抓捕装置下端,在三个第一转动副和六杆可缩放闭环机构远离复合铰链端的三个相间转动副上分别安装驱动电机。
6.进一步的,所述定平台中间为一圆盘,三个转动副座均匀分布在圆盘的外侧。
7.所述的三条运动支链包括第一运动支链、第二运动支链和第三运动支链,三条支链形式相同,包括第一转动副、第二转动副和复合铰链,所述第一运动支链包括一个主动支链和一个从动支链,主动支链上端通过轴承和长轴与定平台相连,使主动支链与定平台之间形成第一转动副,主动支链的下端通过轴承和对锁螺母与从动支链的上端连接块相连,使主动支链与从动支链之间形成第二转动副,其中第一转动副的轴线平行于定平台平面,第二转动副的轴线平行于第一转动副的轴线。
8.所述复合铰链包括转动副r1、转动副r2以及转动副r3,复合铰链连接件上端的轴通过轴承与从动支链下端的预留孔连接,通过卡簧进行轴向固定,构成转动副r1,复合铰链连接件与t型轴通过轴承相连接,通过卡簧进行轴向固定,构成转动副r2,t型轴末端通过轴承与六杆可缩放闭环机构相连接,通过卡簧进行轴向固定,构成转动副r3,其中转动副r1轴线与第二转动副轴线垂直,转动副r2轴线与转动副r1轴线垂直、与定平台平面平行,转动副
r3轴线与转动副r2轴线垂直、与定平台平面垂直。
9.所述第二运动支链、第三运动支链结构连接形式与第一运动支链相同。
10.进一步的,六杆可缩放闭环机构包括三个连杆1、三个连杆2以及六个成角度布置的转动副,且首尾连杆相连形成闭环运动链,三个电机分别安装在远离复合铰链端的三个相间转动副上形成三个主动副,六杆可缩放闭环机构具有收缩与伸展功能。
11.进一步的,六杆可缩放闭环机构三个从动副与三条运动支链末端复合铰链通过共用转动轴的方式连接在一起,用六杆可缩放闭环机构充当整体装置的动平台。
12.本实用新型的有益效果主要表现在:本实用新型将并联机构技术应用到空间抓捕对接任务,提出了一种空间多环闭链并联式柔性抓捕装置,装置整体通过连接模块搭载空间飞行器上,可实现在轨空间内装置的整体折展、位姿调节、变形抓捕的功能。抓捕装置通过并联机构三条支链的协同运动可实现六杆可缩放闭环机构的姿态与位置控制。通过装置的收缩与展开实现对多种目标物体的抓捕,同时具有抓取方便、刚度大、承载能力强、灵活性高等优点。
附图说明
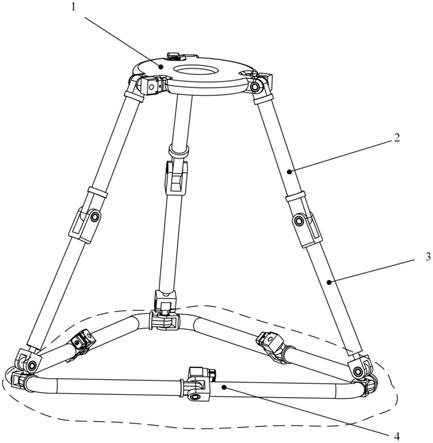
13.图1是本实用新型的一种空间多环闭链并联式柔性抓捕装置整体结构示意图;
14.图2是本实用新型的一种空间多环闭链并联式柔性抓捕装置第一运动支链结构示意图;
15.图3是本实用新型的一种空间多环闭链并联式柔性抓捕装置复合铰链的结构示意图;
16.图4是本实用新型的一种空间多环闭链并联式柔性抓捕装置六杆可缩放闭环机构结构示意图;
17.图5是本实用新型的一种空间多环闭链并联式柔性抓捕装置抓取物体1示意图;
18.图6是本实用新型的一种空间多环闭链并联式柔性抓捕装置抓取物体2示意图。
19.其中:
20.图1中:1.定平台;2.主动支链;3.从动支链;4.六杆可缩放闭环机构;
21.图2中:21.第一转动副;22.主动支链;23.第二转动副;31.从动支链;32.复合铰链;
22.图3中:31.从动支链;321.复合铰链连接件;322.t型轴;41.从动副;
23.图4中:41.从动副;42.连杆1;43.主动副;44.连杆2。
具体实施方式
24.下面结合附图以及具体的实施方式,对本实用新型做出进一步说明。
25.参考图1、图2,一种空间多环闭链并联式柔性抓捕装置包括:定平台(1)、六杆可缩放闭环机构(4)以及连接两者的三条结构对称、各向同性运动支链(2、3),所述定平台(1)安装在抓捕装置上端,所述每条运动支链包括一个主动支链(2)和一个从动支链(3),主动支链(2)与定平台(1)通过第一转动副(21)相连,主动支链(2)与从动支链(3)通过第二转动副(23)相连,从动支链(3)与六杆可缩放闭环机构(4)通过复合铰链(32)相连,六杆可缩放闭环机构(4)安装在抓捕装置下端,在三个第一转动副(21)和六杆可缩放闭环机构(4)远离复
合铰链端的三个相间转动副上分别安装驱动电机。
26.参考图1,所述定平台(1)中间为一圆盘,三个转动副座均匀分布在圆盘的外侧。
27.参考图1、图2,所述的三条运动支链包括第一运动支链、第二运动支链和第三运动支链,三条支链形式相同,包括第一转动副(21)、第二转动副(23)和复合铰链(32),所述第一运动支链包括一个主动支链(2)和一个从动支链(3),主动支链(2)上端通过轴承和长轴与定平台(1)相连,使主动支链(2)与定平台(1)之间形成第一转动副(21),主动支链(2)的下端通过轴承和对锁螺母与从动支链(3)的上端连接块相连,使主动支链(2)与从动支链(3)之间形成第二转动副(23),其中第一转动副(21)的轴线平行于定平台平面,第二转动副(23)的轴线平行于第一转动副的轴线。
28.参考图3,所述复合铰链包括转动副r1、转动副r2以及转动副r3,复合铰链连接件(321)上端的轴通过轴承与从动支链(31)下端的预留孔连接,通过卡簧进行轴向固定,构成转动副r1,复合铰链连接件(321)与t型轴(322)通过轴承相连接,通过卡簧进行轴向固定,构成转动副r2,t型轴(322)的末端通过轴承与六杆可缩放闭环机构(41)相连接,通过卡簧进行轴向固定,构成转动副r3,其中转动副r1轴线与第二转动副轴线垂直,转动副r2轴线与转动副r1轴线垂直、与定平台平面平行,转动副r3轴线与转动副r2轴线垂直、与定平台平面垂直。
29.参考图4,六杆可缩放闭环机构(4)包括三个连杆1(42)、三个连杆2(44)以及六个成角度布置的转动副(41、43),且首尾连杆相连形成闭环运动链,三个电机分别安装在远离复合铰链端的三个相间转动副上形成三个主动副(43),六杆可缩放闭环机构具有收缩与伸展功能。
30.参考图1至图4,六杆可缩放闭环机构三个从动副(41)与三条运动支链末端复合铰链(32)通过共用转动轴的方式连接在一起,用六杆可缩放闭环机构(4)充当整体机构的动平台。
31.参考图5,空间多环闭链并联式柔性抓捕装置以抓捕模式抓捕目标物体1,通过三条运动支链以及六杆可缩放闭环机构协同作用将目标物体抓紧。
32.参考图6,空间多环闭链并联式柔性抓捕装置以抓捕模式抓捕目标物体2,通过三条运动支链以及六杆可缩放闭环机构协同作用将目标物体抓紧。
33.参考图5、图6,空间多环闭链并联式柔性抓捕装置能够通过整体折展、位姿调节、变形抓捕,实现对多目标物体的抓捕,属于柔性抓捕装置。
34.以上所述的一种空间多环闭链并联式柔性抓捕装置的实施方式不局限于以上实施例所描述的实施例形式,根据本实用新型公开的内容,所属技术领域的技术人员还可以在本实用新型专利的基础上采取其他的具体方式进行修改、等同替换、改进等,因此,实施例不能理解为本实用新型仅可以实施的具体实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1