一种协同测绘作业设备的制作方法
1.本发明属于测绘设备领域,具体为一种协同测绘作业设备。
背景技术:
2.测绘字面理解为测量和绘图,是以计算机技术、光电技术、网络通讯技术、空间科学、信息科学为基础,以全球导航卫星定位系统、遥感、地理信息系统为技术核心,选取地面已有的特征点和界线并通过测量手段获得反映地面现状的图形和位置信息,供工程建设、规划设计和行政管理之用,三维激光扫描仪是测绘常用设备之一,三维激光扫描仪是无合作目标激光测距仪与角度测量系统组合的自动化快速测量系统,在复杂的现场和空间对被测物体进行快速扫描测量,直接获得激光点所接触的物体表面的水平方向、天顶距、斜距和反射强度,自动存储并计算,获得点云数据,为了提高扫描范围,工作人员将扫描设备安装于无人机上进行扫描工作。
3.扫描仪安装在无人机上后,使得扫描仪的扫描位置只能通过无人机的移动而移动,从而使得扫描角度无法改变,从而造成对地形的扫描不准确。
技术实现要素:
4.针对上述情况,为克服现有技术的缺陷,本发明提供一种协同测绘作业设备,有效的解决了目前扫描仪扫描角度无法改变,从而造成对地形的扫描不准确的问题。
5.为实现上述目的,本发明提供如下技术方案:一种协同测绘作业设备,包括无人机,所述无人机的底端对称安装有支腿,无人机的顶端等角度安装有机翼臂,机翼臂的顶端安装有马达,马达的输出轴顶端安装有机翼,无人机的底端安装有扫描组件,无人机的底端安装有挡光防扰组件,无人机的底端安装有角度调节组件,无人机的底端安装有高度调节组件;
6.扫描组件包括安装于无人机底端的安装箱,安装箱的一侧开设有内槽,内槽的内部安装有扫描仪,扫描仪的一侧安装有激光收发孔,安装箱的一侧安装有转动架,转动架包括两个固定板,两个固定板之间安装有固定杆连接,固定杆的外侧安装有反光镜,反光镜的中部开设有转槽,固定杆插接于转槽内部,激光收发孔与反光镜的中心在一条直线上;
7.挡光防扰组件包括对称开设于安装箱一侧的插槽,插槽位于内槽两侧,插槽的内部对称安装有第一弹簧,第一弹簧的一端安装有挡光板,挡光板插接于插槽内部,两个挡光板之间安装有连板,连板的一侧开设有滑动槽,滑动槽的内部滑动连接有滑动块,滑动块的一侧安装有螺槽块,螺槽块的内部螺纹连接有螺杆;
8.角度调节组件包括对称开设于转动架两侧的滑槽,滑槽的内顶壁上安装有第二弹簧,第二弹簧的底端安装有滑块,滑块的正面安装有中部转座,中部转座的两侧对称转动连接有转杆,转杆的一端转动连接有侧部转座,侧部转座的一侧安装有限位板,反光镜的两端对称安装有受压杆,受压杆的两端均贯穿至反光镜的两侧,受压杆与限位板接触。
9.优选的,所述无人机的底端安装有电机箱,电机箱的内部开设有电机槽,电机槽的
内部安装有电机,螺杆安装于电机的输出轴一端。
10.优选的,所述限位板的正面安装有限位块,限位块滑动连接于限位槽的内部,限位槽开设于挡光板靠近反光镜的一侧,反光镜的顶端安装有配重磁块。
11.优选的,所述中部转座的底端安装有底杆,底杆的底端安装有顶头,顶头的下方设有三角顶块,且三角顶块的顶端与顶头接触,其中三角顶块安装于挡光板靠近反光镜的一侧,连板的一侧设有转动稳定单元。
12.优选的,所述高度调节组件包括开设于无人机内部的内腔,内腔的内部安装有顶板,顶板的底端对称安装有第一连杆,第一连杆贯穿至无人机的底端,且第一连杆的底端与安装箱固定连接,顶板的底端对称安装有第二连杆,第二连杆的底端贯穿至无人机的底端,第二连杆的底端安装有连接板,转动架安装于连接板的底端,顶板的底端对称安装有第三弹簧。
13.优选的,所述内腔的内部转动连接有转动杆,转动杆的外侧安装有凸轮,凸轮的顶端与顶板的底端相接触,转动杆的外侧安装有第一链轮。
14.优选的,所述螺杆的外侧安装有第二链轮,第二链轮的外侧啮合连接有链条,链条与第一链轮相啮合,链条的外侧开设有链条槽,链条槽开设于内腔的底端,且链条槽贯穿至无人机的底端。
15.优选的,所述转动稳定单元包括安装于连板靠近安装箱一侧的下齿条,下齿条的上方设有安装板,安装板的一端通过连板上方与电机箱的侧壁固定连接,安装板的两侧对称安装有侧部板,侧部板的内部开设有链条限位槽,链条活动连接于链条限位槽内部,安装板的底端开设有底部移动槽。
16.优选的,所述底部移动槽的内部滑动连接有移动块,移动块的底端安装有连接底块,连接底块的底端安装有上齿条,安装板的底端对称安装有齿轮安装板,两个齿轮安装板之间转动连接有调节齿轮,调节齿轮的顶端与上齿条啮合连接,且调节齿轮的底端与下齿条啮合连接,上齿条靠近配重磁块的一端安装有磁块,磁块的磁性与配重磁块的磁性相同。
17.与现有技术相比,本发明的有益效果是:
18.(1)、本发明,通过反光镜需向上转动,此时电机的输出轴正转,由于螺槽块与螺杆螺纹连接,从而带动连板朝着安装箱移动,从而带动三角顶块朝着安装箱移动后推动顶头向上移动,使得中部转座向上移动后,通过转杆带动两侧的限位板相互靠近,从而推动受压杆移动后,带动反光镜改变倾角,从而改变激光的射出角度,继而提高扫描设备的扫描灵活性;
19.(2)、该发明,通过反光镜向上转动时,反光镜的整体宽度变小,此时螺杆正转,从而推动连板朝着安装箱移动,从而使得挡光板插入到插槽内部,而反光镜向下转动时,螺杆反转,使得挡光板向外移动,继而使得挡光板的挡光面积与反光镜的整体宽度相适配,从而提高挡光效果,继而避免外界光对反光镜的激光反射效果产生影响,从而提高激光反射效果,从而提高扫描效果。
20.(3)、该发明,通过反光镜的角度需要改变,螺杆带动第二链轮转动,继而通过链条带动第一链轮转动,从而使得转动杆转动后,带动凸轮转动,此时凸轮顶端与内腔内底壁之间的距离缩短,从而使得顶板向下移动,带动安装箱和连接板向下移动,继而使得扫描仪和反光镜同步向下移动,从而使得在射出角度偏转时,激光射出位置与地面的距离缩短,从而
提高激光的射出路径,继而提高扫描精确度。
附图说明
21.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。
22.在附图中:
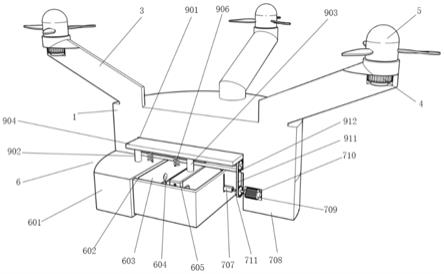
23.图1为本发明结构示意图;
24.图2为本发明无人机内部结构示意图;
25.图3为本发明扫描组件结构示意图;
26.图4为本发明挡光防扰组件结构示意图;
27.图5为本发明角度调节组件结构示意图;
28.图6为本发明高度调节组件结构示意图;
29.图7为本发明转动稳定单元结构示意图;
30.图8为本发明安装板结构示意图;
31.图9为本发明安装板内部结构示意图;
32.图中:1、无人机;2、支腿;3、机翼臂;4、马达;5、机翼;6、扫描组件;601、安装箱;602、内槽;603、扫描仪;604、激光收发孔;605、转动架;606、反光镜;607、转槽;7、挡光防扰组件;701、插槽;702、第一弹簧;703、挡光板;704、连板;705、滑动槽;706、滑动块;707、螺槽块;708、电机箱;709、电机槽;710、电机;711、螺杆;8、角度调节组件;801、滑槽;802、第二弹簧;803、滑块;804、中部转座;805、转杆;806、侧部转座;807、限位板;808、限位块;809、受压杆;810、配重磁块;811、底杆;812、顶头;813、限位槽;814、三角顶块;815、转动稳定单元;8151、上齿条;8152、安装板;8153、侧部板;8154、链条限位槽;8155、底部移动槽;8156、移动块;8157、连接底块;8158、上齿条;8159、磁块;81510、齿轮安装板;81511、调节齿轮;9、高度调节组件;901、内腔;902、第一连杆;903、第二连杆;904、顶板;905、连接板;906、第三弹簧;907、转动杆;908、凸轮;909、第一链轮;910、第二链轮;911、链条;912、链条槽。
具体实施方式
33.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例;基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
34.实施例一,由图1-图6给出,本发明包括无人机1,无人机1的底端对称安装有支腿2,无人机1的顶端等角度安装有机翼臂3,机翼臂3的顶端安装有马达4,马达4的输出轴顶端安装有机翼5,无人机1的底端安装有扫描组件6,无人机1的底端安装有挡光防扰组件7,无人机1的底端安装有角度调节组件8,无人机1的底端安装有高度调节组件9,扫描组件6包括安装于无人机1底端的安装箱601,安装箱601的一侧开设有内槽602,内槽602的内部安装有扫描仪603,扫描仪603的一侧安装有激光收发孔604,安装箱601的一侧安装有转动架605,转动架605包括两个固定板,两个固定板之间安装有固定杆连接,固定杆的外侧安装有反光镜606,反光镜606的中部开设有转槽607,固定杆插接于转槽607内部,激光收发孔604与反
光镜606的中心在一条直线上;
35.在使用时,操控无人机1飞行至需要进行扫描地形的位置,开启扫描仪603,从而使得激光收发孔604处射出扫描激光,激光横向射出后,射到反光镜606表面,由于反光镜606初始状态为45
°
倾角,从而使得激光射到反光镜606表面后,经过反光镜606的反射,使得激光向下垂直射出,从而使得激光射到扫描地面上,继而完成扫描。
36.实施例二,在实施例一的基础上,挡光防扰组件7包括对称开设于安装箱601一侧的插槽701,插槽701位于内槽602两侧,插槽701的内部对称安装有第一弹簧702,第一弹簧702的一端安装有挡光板703,挡光板703插接于插槽701内部,两个挡光板703之间安装有连板704,连板704的一侧开设有滑动槽705,滑动槽705的内部滑动连接有滑动块706,滑动块706的一侧安装有螺槽块707,螺槽块707的内部螺纹连接有螺杆711,无人机1的底端安装有电机箱708,电机箱708的内部开设有电机槽709,电机槽709的内部安装有电机710,螺杆711安装于电机710的输出轴一端;
37.当反光镜606向上转动时,反光镜606的整体宽度变小,此时螺杆711正转,从而推动连板704朝着安装箱601移动,从而使得挡光板703插入到插槽701内部,而反光镜606向下转动时,螺杆711反转,从而带动连板704朝着电机箱708移动,从而使得挡光板703向外移动,继而使得挡光板703的挡光面积与反光镜606的整体宽度相适配,从而提高挡光效果,继而避免外界光对反光镜606的激光反射效果产生影响,从而提高激光反射效果,从而提高扫描效果。
38.实施例三,在实施例一的基础上,角度调节组件8包括对称开设于转动架605两侧的滑槽801,滑槽801的内顶壁上安装有第二弹簧802,第二弹簧802的底端安装有滑块803,滑块803的正面安装有中部转座804,中部转座804的两侧对称转动连接有转杆805,转杆805的一端转动连接有侧部转座806,侧部转座806的一侧安装有限位板807,反光镜606的两端对称安装有受压杆809,受压杆809的两端均贯穿至反光镜606的两侧,受压杆809与限位板807接触,限位板807的正面安装有限位块808,限位块808滑动连接于限位槽813的内部,限位槽813开设于挡光板703靠近反光镜606的一侧,反光镜606的顶端安装有配重磁块810,中部转座804的底端安装有底杆811,底杆811的底端安装有顶头812,顶头812的下方设有三角顶块814,且三角顶块814的顶端与顶头812接触,其中三角顶块814安装于挡光板703靠近反光镜606的一侧,,连板704的一侧设有转动稳定单元815;
39.当需要调整激光的射出角度时,此时开启电机710,从而使得电机710的输出轴带动螺杆711正反转,若需要射出角度左偏时,此时反光镜606需向上转动,此时电机710的输出轴正转,由于螺槽块707与螺杆711螺纹连接,从而带动连板704朝着安装箱601移动,从而带动三角顶块814朝着安装箱601移动后推动顶头812向上移动,继而使得中部转座804向上移动后,通过转杆805带动两侧的限位板807相互靠近,从而推动受压杆809移动后,带动反光镜606改变倾角,从而改变激光的射出角度,继而提高扫描设备的扫描灵活性,若需要的射出角度右偏时,此时电机710的输出轴反转,从而带动连板704朝着电机箱708移动,从而带动挡光板703移动后,使得三角顶块814与顶头812的接触位置向下移动,从而使得中部转座804在第二弹簧802的作用下向下移动,继而带动两侧的限位板807朝着两侧移动,继而使得反光镜606在配重磁块810的重力作用下向下转动,从而使得激光的射出角右偏。
40.实施例四,在实施例一的基础上,高度调节组件9包括开设于无人机1内部的内腔
901,内腔901的内部安装有顶板904,顶板904的底端对称安装有第一连杆902,第一连杆902贯穿至无人机1的底端,且第一连杆902的底端与安装箱601固定连接,顶板904的底端对称安装有第二连杆903,第二连杆903的底端贯穿至无人机1的底端,第二连杆903的底端安装有连接板905,转动架605安装于连接板905的底端,顶板904的底端对称安装有第三弹簧906,内腔901的内部转动连接有转动杆907,转动杆907的外侧安装有凸轮908,凸轮908的顶端与顶板904的底端相接触,转动杆907的外侧安装有第一链轮909,螺杆711的外侧安装有第二链轮910,第二链轮910的外侧啮合连接有链条911,链条911与第一链轮909相啮合,链条911的外侧开设有链条槽912,链条槽912开设于内腔901的底端,且链条槽912贯穿至无人机1的底端;
41.当反光镜606的角度需要改变,从而使得螺杆711转动,当螺杆711转动时带动第二链轮910转动,继而通过链条911带动第一链轮909转动,从而使得转动杆907转动后,带动凸轮908转动,在初始状态时,凸轮908的长径一端与顶板904底端接触,当凸轮908转动后,此时凸轮908顶端与内腔901内底壁之间的距离缩短,从而使得顶板904向下移动,从而带动安装箱601和连接板905向下移动,继而使得扫描仪603和反光镜606同步向下移动,从而使得在射出角度偏转时,激光射出位置与地面的距离缩短,从而提高激光的射出路径,继而提高扫描精确度,且在调整反光镜606角度时,螺杆711的转动角度小于半周。
42.实施例五,在实施例一的基础上,转动稳定单元815包括安装于连板704靠近安装箱601一侧的下齿条8151,下齿条8151的上方设有安装板8152,安装板8152的一端通过连板704上方与电机箱708的侧壁固定连接,安装板8152的两侧对称安装有侧部板8153,侧部板8153的内部开设有链条限位槽8154,链条911活动连接于链条限位槽8154内部,安装板8152的底端开设有底部移动槽8155,底部移动槽8155的内部滑动连接有移动块8156,移动块8156的底端安装有连接底块8157,连接底块8157的底端安装有上齿条8158,安装板8152的底端对称安装有齿轮安装板81510,两个齿轮安装板81510之间转动连接有调节齿轮81511,调节齿轮81511的顶端与上齿条8158啮合连接,且调节齿轮81511的底端与下齿条8151啮合连接,上齿条8158靠近配重磁块810的一端安装有磁块8159,磁块8159的磁性与配重磁块810的磁性相同当连板704朝着反光镜606一侧移动时,此时两个限位板807相互靠近后,带动反光镜606更加倾斜,从而使得此时配重磁块810与连板704之间的距离逐渐靠近,此时由于连板704移动,从而使得下齿条8151带动调节齿轮81511转动,而调节齿轮81511的顶端与上齿条8158啮合,从而使得带动上齿条8158反向移动,从而使得磁块8159反向移动,从而使得磁块8159和配重磁块810之间的距离保持在一定范围内不变动,从而使得反光镜606在倾斜时受到磁块8159的斥力不变,继而在磁块8159的斥力和限位板807的支撑力作用下,反光镜606的状态更加稳定,且不会影响反光镜606的转动。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1