一种集成无线充电模组的收展变桨距旋翼多电机动力系统
1.本发明涉及一种集成无线充电模组的收展变桨距旋翼多电机动力系统,作为关键子系统主要应用于飞行汽车、多旋翼飞行器、多电飞机、水下推进器等装备中。
背景技术:
2.在公路日益拥堵的路况下,发展一种evtol型陆空两用的飞行汽车,将提供一种全新出行方式。常规的直升机采用多组连杆连接十字盘,通过舵机操纵连杆控制十字盘实现变桨距操作,从而控制直升机的姿态和升力,但也存在直升机旋翼或者无人机的旋翼往往无法实现自动收拢或者折叠、需要固定机场跑道、滞空时间短、占用空间大、飞行距离短、公路无法起降等不足。
技术实现要素:
3.为了克服上述现有技术的缺点,本发明的目的在于提出一种集成无线充电模组的收展变桨距旋翼多电机动力系统,以提高滞空时间和续航里程、降低旋翼占用空间。
4.为解决上述技术问题,本发明提出以下技术方案:
5.一种集成无线充电模组的收展变桨距旋翼多电机动力系统,所述系统包括旋翼机构和无线充电模组;
6.所述旋翼机构包括大锥齿轮和大锥齿轮驱动电机模组,所述大锥齿轮的顶面设有六边形凹槽,所述大锥齿轮驱动电机模组的输出端设有六边形凸台法兰,通过所述六边形凸台法兰插入到所述六边形凹槽,实现所述大锥齿轮驱动电机模组驱动所述大锥齿轮的旋转;所述大锥齿轮的回转圆柱面上套装有第一深沟球轴承和第一推力球轴承,所述第一深沟球轴承和第一推力球轴承的外圈套装在轴承座内;所述大锥齿轮通过大锥齿轮驱动电机模组驱动,且通过第一推力球轴承和第一深沟球轴承,实现相对轴承座的旋转运动;所述轴承座的外圆柱面套装有第二深沟球轴承和第二推力球轴承;桨箍套装在所述大锥齿轮外部,且能够通过所述第二深沟球轴承和第二推力球轴承实现相对轴承座的旋转运动;
7.所述旋翼机构还包括小锥齿轮轴,所述桨箍圆周方向设有三个圆柱形空心凸台,用于放置三个小锥齿轮轴;第三深沟球轴承、第三推力球轴承和第四深沟球轴承内圈套装到小锥齿轮轴上,外圈套装到桨箍的空心凸台上;大锥齿轮通过齿轮啮合驱动三个小锥齿轮轴旋转,所述小锥齿轮轴能够通过所述第三深沟球轴承、第三推力球轴承和第四深沟球轴承实现相对桨箍的旋转运动。
8.所述旋翼机构包括还包括第一法兰,所述第一法兰套装于所述小锥齿轮轴上,第一机座和第二机座分别固定在第一法兰上;第一旋翼收展电机模组和第二旋翼收展电机模组分别固定在所述第一机座和第二机座上;所述第一旋翼收展电机模组和第二旋翼收展电机模组的输出轴与第二法兰连接,所述第二法兰上固定有螺旋桨桨叶底座,且所述螺旋桨桨叶底座上安装有旋翼桨叶;
9.所述大锥齿轮驱动电机模组、第一旋翼收展电机模组和第二旋翼收展电机模组均
集成有永磁直流无刷电机、永磁直流无刷电机控制器和谐波减速器,且具有电子刹车功能。
10.进一步的,所述第一旋翼收展电机模组和第二旋翼收展电机模组共同驱动第二法兰,实现一个旋翼桨叶的展开与收拢;三组所述旋翼桨叶展开状态为两两之间成120
°
角度,三组所述旋翼桨叶收拢状态为三者轴线成平行状态;大锥齿轮驱动电机模组驱动大锥齿轮,带动三个小锥齿轮轴旋转,实现旋翼桨叶变桨距动作。
11.进一步的,所述大锥齿轮驱动电机模组、第一旋翼收展电机模组和第二旋翼收展电机模组由副蓄电池供电,主蓄电池通过无线充电系统实现副蓄电池的充电;
12.所述大锥齿轮驱动电机模组、第一旋翼收展电机模组和第二旋翼收展电机模组分别包括大锥齿轮驱动电机控制器、第一机翼收展电机控制器和第二机翼收展电机控制器;
13.主蓄电池经过buck降压电路供电给plc运动控制器,plc运动控制器通过wifi/蓝牙/zigbee模块无线发送位置控制指令给大锥齿轮驱动电机控制器、第一机翼收展电机控制器和第二机翼收展电机控制器,实现多个电机位置控制。
14.进一步的,在所述旋翼机构的底部设置有无线充电模组。
15.进一步的,所述桨箍上方与第一端盖相固定,下方与第二端盖固定。
16.进一步的,所述大锥齿轮驱动电机模组内部设置有电子刹车,用于锁定大锥齿轮驱动电机模组的轴的旋转。
17.本发明中的三个旋翼的变桨距操作通过大锥齿轮驱动电机模组驱动大锥齿轮,大锥齿轮带动三个小锥齿轮轴实现变桨距操作。每一个旋翼的收展操作通过一对旋翼收展电机模组实现,最终收拢状态时三个旋翼收拢到轴线平行的位置。大锥齿轮驱动电机模组和旋翼收展电机模组由副蓄电池供电,主蓄电池通过无线充电系统实现副蓄电池的充电。主蓄电池经过buck降压电路供电给plc运动控制器,plc运动控制器通过wifi/蓝牙/zigbee模块无线发送位置控制指令给大锥齿轮驱动电机控制器和六个机翼收展电机控制器,实现电机位置控制。
18.本发明产生的有益效果:
19.通过本发明能够实现旋翼的自动变桨距、旋翼的自动收展操作,有利于控制升力,节省旋翼所占空间。
附图说明
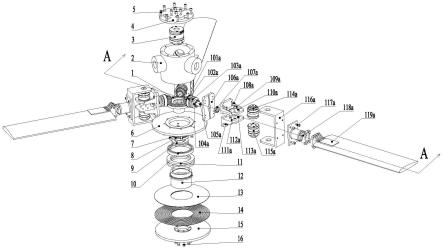
20.图1为集成无线充电模组的收展变桨矩旋翼多电机动力系统结构爆炸图;
21.图2为集成无线充电模组的收展变桨矩旋翼多电机动力系统的结构剖面图;
22.图3为集成无线充电模组的收展变桨矩旋翼多电机动力系统的旋翼展开图;
23.图4为集成无线充电模组的收展变桨矩旋翼多电机动力系统的旋翼变桨矩图;
24.图5为集成无线充电模组的收展变桨矩旋翼多电机动力系统的旋翼收拢状态一图;
25.图6为集成无线充电模组的收展变桨矩旋翼多电机动力系统的旋翼收拢状态二图;
26.图7为集成无线充电模组的收展变桨矩旋翼多电机动力系统的无线充电系统控制原理图;
27.图8为集成无线充电模组的收展变桨矩旋翼多电机动力系统的电气系统控制原理
图。
28.附图标记:
29.1为大锥齿轮,2为桨箍,3为大锥齿轮驱动电机模组、4为第一端盖,5为第一螺钉,6为第二端盖,7为第二螺钉,8为第一推力球轴承,9为第一深沟球轴承,10为第二深沟球轴承,11为第二推力球轴承,12为轴承座,13为接收端线圈,14为发射端线圈,15为第三端盖,16为第三螺钉,101a为孔用挡圈,102a为第三深沟球轴承,103a为第三推力球轴承,104a为第四深沟球轴承,105a为小锥齿轮轴,106a为第一法兰,107a为圆螺母,108a为第四螺钉,109a为第一机座,110a为第五螺钉,111a为第六螺钉,112a为第二机座,113a为第七螺钉,114a为第一旋翼收展电机模组,115a第二旋翼收展电机模组,116a为第二法兰,117a为第八螺钉,118a为螺旋桨桨叶底座,119a为旋翼桨叶;
30.201为主蓄电池,202为第一buck降压电路,203为第一h桥逆变电路(单相),204为无线充电模组,205为第二h桥逆变电路(单相),206为第二buck降压电路,207为副蓄电池,208为无线充电模组控制器;
31.209为第一全桥逆变电路(三相),210为大锥齿轮驱动电机控制器,211为第二全桥逆变电路(三相),212为第一机翼收展电机控制器,213为第三全桥逆变电路(三相),214为第二机翼收展电机控制器,215为第三buck降压电路,216为plc运动控制器,217wifi/蓝牙/zigbee无线传输模块。
具体实施方式
32.下面结合附图对本发明作详细描述。
33.本发明所述的一种集成无线充电模组的收展变桨距旋翼多电机动力系统,如图1-5所示,包括大锥齿轮1,大锥齿轮1的顶面设计有六边形凹槽,大锥齿轮驱动电机模组3的输出端设计有六边形凸台法兰,将六边形凸台法兰插入到六边形凹槽,实现大锥齿轮驱动电机模组3驱动大锥齿轮1的旋转。第一深沟球轴承9和第一推力球轴承8套装到大锥齿轮1的回转圆柱面上,这两个轴承的外圈套装到轴承座12上。大锥齿轮1通过大锥齿轮驱动电机模组3驱动,使用第一推力球轴承8和第一深沟球轴承9,实现相对轴承座12的旋转运动。大锥齿轮驱动电机模组3通过螺钉固定到第一端盖4。
34.大锥齿轮1安装在桨箍2的空心内腔,桨箍2相对轴承座12的旋转运动,通过第二深沟球轴承10和第二推力球轴承11实现;桨箍2与第一端盖4通过第一螺钉5固定。大锥齿轮驱动电机模组3内部设置有电子刹车,用于锁定轴的旋转。轴承座12、第三螺钉16和第三端盖15作为静止状态的零件,轴承座12和第三端盖15通过第三螺钉16固定到一起作为一个整体支撑,轴承座12的内圆柱面套装有第一推力球轴承8和第一深沟球轴承9,轴承座12的外圆柱面套装有第二深沟球轴承10、第二推力球轴承11。
35.在多电机动力系统的底部设计有无线充电模组,其中接收端线圈13通过螺钉固定到第二端盖6上,第二端盖6又通过第二螺钉7固定到桨箍2上。发射端线圈14通过螺钉固定到第三端盖15上。发射端线圈14通过电磁感应将能量传输到接收端线圈13侧。
36.所述系统还包括小锥齿轮轴105a,所述大锥齿轮驱动电机模组驱动大锥齿轮,进而带动三个所述小锥齿轮轴旋转;本方案的动力子系统配置有一个大锥齿轮1与三个小锥齿轮轴105a,都放置在桨箍2的内部,桨箍2圆周方向设计有三个圆柱形空心凸台,用于放置
小锥齿轮轴105a。第三深沟球轴承102a、第三推力球轴承103a和第四深沟球轴承104a内圈套装到小锥齿轮轴105a上,外圈套装到桨箍2的空心凸台上。大锥齿轮1通过齿轮啮合驱动三个小锥齿轮轴105a旋转,从而实现变桨距动作。小锥齿轮轴105a相对桨箍2的旋转运动,通过第三深沟球轴承102a、第三推力球轴承103a和第四深沟球轴承104a实现,孔用挡圈101a用于限制第三深沟球轴承102a的轴向窜动。第一法兰106a套装到小锥齿轮轴105a上,通过圆螺母107a固定;第一机座109a和第二机座112a通过第四螺钉108a和第六螺钉111a固定到第一法兰106a上。第一旋翼收展电机模组114a和第二旋翼收展电机模组115a分别通过第五螺钉110a和第七螺钉113a固定到第一机座109a和第二机座112a上。
37.第一旋翼收展电机模组114a和第二旋翼收展电机模组115a的输出轴与第二法兰116a连接,螺旋桨桨叶底座118a通过第八螺钉117a固定到第二法兰116a上,螺旋桨桨叶底座118a安装有旋翼桨叶119a,大锥齿轮驱动电机模组3、第一旋翼收展电机模组114a和第二旋翼收展电机模组115a均集成有永磁直流无刷电机、永磁直流无刷电机控制器、谐波减速器,且具有电子刹车功能。单个旋翼结构爆炸图如图1、单个旋翼结构剖面如图2所示。
38.所述的一种集成无线充电模组的收展变桨距旋翼多电机动力系统,第一旋翼收展电机模组114a和第二旋翼收展电机模组115a接收plc运动控制器216的角度位置指令和副蓄电池207供电条件下,共同驱动第二法兰116a绕第一旋翼收展电机模组114a和第二旋翼收展电机模组115a的轴线旋转,实现一个旋翼桨叶119a的由收拢状态到展开状态,最终实现三组旋翼之间成120
°
角度,旋翼结构展开图如图3所示。
39.所述的一种集成无线充电模组的收展变桨距旋翼多电机动力系统,大锥齿轮驱动电机模组3接收plc运动控制器216的角度位置指令和副蓄电池207供电条件下,驱动大锥齿轮1旋转,带动三个小锥齿轮轴105a旋转,实现旋翼桨叶119a的变桨距动作,其它两个旋翼桨叶旋转方向、速度与旋翼桨叶119a相同,如图4所示。
40.所述的一种集成无线充电模组的收展变桨距旋翼多电机动力系统,第一旋翼收展电机114a和第二旋翼收展电机115a接收plc运动控制器216的角度位置指令和副蓄电池207供电条件下,实现第一旋翼收展电机模组114a和第二旋翼收展电机模组115a的轴线处于垂直状态,然后共同驱动第二法兰116a旋转,从而实现一个旋翼桨叶119a的收拢。另一旋翼桨叶的动作沿着与旋翼桨叶119a的收拢动作反方向,实现收拢,最终实现三个旋翼轴线处于平行的位置,展开状态如图5所示。
41.所述的一种集成无线充电模组的收展变桨距旋翼多电机动力系统,第一旋翼收展电机114a和第二旋翼收展电机115a接收plc运动控制器216的角度位置指令和副蓄电池207供电条件下,实现第一旋翼收展电机模组114a和第二旋翼收展电机模组115a的轴线处于水平状态,然后共同驱动第二法兰116a旋转,从而实现一个旋翼桨叶119a的向下收拢。另外两个旋翼桨叶的动作与旋翼桨叶119a的收拢动作方向相同,均向下收拢,最终实现三个旋翼轴线处于平行的位置,展开状态如图6所示。
42.所述的一种集成无线充电模组的收展变桨距旋翼多电机动力系统,主蓄电池201经过继电器202、第一buck降压电路供电给第一h桥逆变电路(单相)204,经过无线充电模组205,将电能从发射线圈无线传输到接收线圈,然后经第二h桥逆变电路(单相)206和第二buck降压电路207,实现副蓄电池208的充电。无线充电模组控制器209通过采集副蓄电池208的端电压u和电流i,根据电池电量soc控制算法,从而控制继电器202的通断决定是否给
副蓄电池208充电,以及改变第一h桥逆变电路(单相)204和第二h桥逆变电路(单相)206的pwm波形占空比,从而控制无线充电模组205的输入输出电压,整个无线充电系统控制原理图如图7所示。
43.所述的一种集成无线充电模组的收展变桨距旋翼多电机动力系统,主蓄电池201经过第三buck降压电路供电给plc运动控制器216,plc运动控制器216通过wifi/蓝牙/zigbee模块217无线发送位置控制指令给大锥齿轮驱动电机控制器210、第一机翼收展电机控制器212和第二机翼收展电机控制器214。副蓄电池207供电给第一全桥逆变电路(三相)209和大锥齿轮驱动电机控制器210,通过大锥齿轮驱动电机控制器210生成六路pwm控制第一全桥逆变电路(三相)209的mos开关管的通断,从而控制大锥齿轮驱动电机3的位置和转速。同理,副蓄电池207供电给每个旋翼的第二全桥逆变电路(三相)211和第一机翼收展电机控制器212,通过第一机翼收展电机控制器212和第二机翼收展电机控制器214分别生成六路pwm控制第二全桥逆变电路(三相)211和第三全桥逆变电路(三相)213的mos开关管的通断,从而控制第一旋翼收展电机114a和第二旋翼收展电机115a的位置和转速。其它两组旋翼收展动作的控制方式与之相同。整个多电机动力系统的电气系统控制原理图如图8所示。
44.尽管本说明书已经图示和描述了具体的实施实例,但本领域技术人员应该理解,在不背离本发明的范围的情况下,各种替换或等同实现都可以替代所示和所描述的这些具体实施实例。本发明旨在覆盖任何改变和本发明所讨论的各种具体实施实例。因此本发明仅由权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1