变质心共轴双旋翼飞行器及其控制方法
1.本发明涉及共轴旋翼无人飞行器技术领域,特别涉及一种变质心共轴双旋翼飞行器及其控制方法。
背景技术:
2.共轴双旋翼无人飞行器是指飞行器具有绕同一垂直轴线上下两旋翼正反旋转的飞行器,与多旋翼无人机相比,具有速度快、载重大、航时长的优点。
3.传统共轴双旋翼无人机使用大尺寸桨叶,依靠旋翼变总距和周期变距来控制无人机的飞行方向和推进力的大小,但变距机构机械结构极其复杂,导致其故障率高、维护费用高、不易操作,且因需要周期变距使大尺寸桨叶无法使用更高效率的翼型;同时,现有的共轴双旋翼无人飞行器的大多采用圆筒状设计,能源模块置于两层旋翼之下,动力模块置于两层旋翼之间,二者分离且使用导线连接,但由于复杂的机械结构导致其很难做防水处理,在不能水面起降或在雨天环境下工作。
技术实现要素:
4.本发明的目的在于提供一种变质心共轴双旋翼飞行器及其控制方法,用来解决飞行器依靠架构复杂并且可靠性低的变距结构来控制姿态的问题。
5.本发明的技术问题解决方案:一种变质心共轴双旋翼飞行器,其特征在于,包括壳体、飞行驱动、支撑架和若干质心调节装置,所述质心调节装置包括变质心驱动组件和滑块;所述支撑架设置在壳体的内侧,所述飞行驱动分别设置在支撑架的对应两端,所述变质心驱动组件设置在支撑架上,并且变质心驱动组件位于飞行驱动之间,所述滑块通过变质心驱动组件与支撑架滑动连接。
6.进一步限定,所述支撑架包括支撑杆和固定件,所述固定件通过支撑杆与壳体连接,所述变质心驱动组件与固定件连接,所述滑块设置在对应的支撑杆上并与支撑杆滑动连接,变质心驱动组件的输出端与滑块连接。
7.进一步限定,所述支撑杆的数量为2~5个,支撑杆绕固定件的轴线均匀设置,支撑杆与水平面的夹角为0~30
°
。
8.进一步限定,所述支撑杆的数量为3个,所述滑块与支撑杆一一对应。
9.进一步限定,所述变质心驱动组件包括质心驱动件和质心驱动连杆,所述质心驱动件与固定件连接,质心驱动件通过质心驱动连杆与滑块活动连接。
10.进一步限定,固定件两端的飞行驱动结构相同,所述飞行驱动包括动力驱动件和与动力驱动件输出端连接的旋翼,所述动力驱动件设置在固定件对应的端部,所述旋翼沿壳体轴线设置,所述质心驱动件与支撑杆均位于固定件两端的旋翼之间。
11.进一步限定,所述变质心共轴双旋翼飞行器还包括外挂气囊,所述外挂气囊套设在壳体的外侧。
12.进一步限定,基于上述的变质心共轴双旋翼飞行器,包括以下步骤:s1、建立地面坐标系和变质心共轴双旋翼飞行器的机体坐标系;s2、根据变质心共轴双旋翼飞行器在地面坐标中起始位置和期望位置计算得到期望俯仰角和期望滚转角,进而得到变质心共轴双旋翼飞行器的期望姿态角矢量;s3、根据期望姿态角矢量计算得到期望质心位置在机体坐标系的矢量形式,从而计算得到3个滑块的目标舵量,来实现对变质心共轴双旋翼飞行器姿态的控制。
13.进一步限定,所述s2包括以下步骤:s21、所述滑块的数量为3个,3个滑块分别为第一滑块、第二滑块和第三滑块,根据刚体转动定理,得到第一滑块相对于地面坐标系的速度矢量:,其中为变质心共轴双旋翼飞行器相对于地面坐标系的速度矢量,为无人机转动角速度矢量,为滑块相对机体坐标系的速度矢量,为滑块相对机体坐标系的位置矢量;s22、计算得到变质心共轴双旋翼飞行器的质心相对于地面坐标系的速度矢量,具体的:根据质心运动定理有:,进而在机体坐标系下有:其中,为变质心共轴双旋翼飞行器的整体质量,为第一滑块的质量,为中间参数,;s23、设定地面坐标系中变质心共轴双旋翼飞行器的起始位置为,期望位置为,则无人机期望速度表示为:,无人机期望加速度表示为:,其中,、、、、、为pid算法参数,、为积分时间,用于实现抗积分饱和,为当前时刻,为位置跟踪误差,为速度误差;
期望加速度进一步表示为:,其中,为期望加速度在地面坐标系对应轴上的分量;进而求出期望俯仰角为和期望滚转角为:;其中,为当前的偏航角大小,为重力加速度;则变质心共轴双旋翼飞行器期望姿态角矢量表示为。
14.进一步限定,所述s3包括以下步骤:s31、设定变质心共轴双旋翼飞行器起始的俯仰角为,滚转角为,则起始的姿态角矢量表示为:,结合变质心共轴双旋翼飞行器期望姿态角矢量为,则变质心共轴双旋翼飞行器期望姿态角速度表示为:变质心共轴双旋翼飞行器期望姿态角加速度表示为:其中,为姿态角的跟踪误差,、、、、和为pid算法参数,、为积分时长,用于实现抗积分饱和,为姿态角速度的跟踪误差;s32、计算变质心共轴双旋翼飞行器期望合力矩:,其中,为变质心共轴双旋翼飞行器的惯性矩阵,为标量对时间求导;通过变质心共轴双旋翼飞行器在机体坐标系下所受到的合力与期望合力矩,由此得出变质心共轴双旋翼飞行器的目标质心相对于机体坐标的矢量形式:
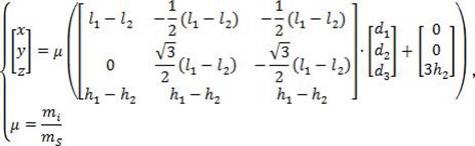
其中为变质心共轴双旋翼飞行器的目标质心在机体坐标系中的分量;s33、计算得到第一滑块、第二滑块和第三滑块的目标舵量;设定质心在机体坐标系的位置为,第一滑块、第二滑块和第三滑块当前舵量对应为,则滑块的舵量与质心位置矢量满足:其中,单个滑块的质量,为第一滑块、第二滑块或第三滑块距机体坐标系轴最大限位,为第一滑块、第二滑块或第三滑块距机体坐标系轴最小限位,为第一滑块、第二滑块或第三滑块距机体坐标系面最高限位,为第一滑块、第二滑块或第三滑块距机体坐标系面最低限位;由此,求解得到第一滑块、第二滑块和第三滑块对应的目标舵量,其中分别为第一滑块、第二滑块和第三滑块在机体坐标系中的分量:从而根据目标舵量控制三个对应滑块的移动距离来实现对变质心共轴双旋翼飞行器飞行姿态的控制。
15.本发明的有益效果在于:1、通过改变质心的位置来控制飞行器的姿态,无需依靠周期变距,通过变质心驱动组件调节滑块的位置来改变飞行器质心位置,从而使得飞行器所受的合力矩改变,进而控制飞行器的姿态,结构简单,操作方便,稳定可靠。
16.2、通过增加外挂气囊来实现双旋翼飞行器能够在水面上进行起飞与降落,适用范围与使用用途更广。
附图说明
17.图1为本发明整体结构俯视示意图;图2为图1中a-a剖面示意图;图中,1-壳体;2-飞行驱动;21-第一动力驱动件;22-第二动力驱动件;23-第一旋翼;24-第二旋翼;3-支撑架;31-支撑杆;311-滑轨;32-固定件;4-变质心驱动组件;41-质心
驱动件;42-质心驱动连杆;5-滑块;6-外挂气囊;7-电池。
具体实施方式
18.实施例1参考图1和图2,本发明提供一种变质心共轴双旋翼飞行器,包括壳体1、飞行驱动2、支撑架3和若干质心调节装置,飞行驱动2包括动力驱动件和旋翼,支撑架3包括支撑杆31和固定件32,质心调节装置包括变质心驱动组件4和滑块5,变质心驱动组件4包括质心驱动件41和质心驱动连杆42。
19.具体的,壳体1为没有上下端面的空腔结构,壳体1可以选择为空心的正方体结构或者长方体结构,优选为空心的圆柱体结构,此时壳体1为涵道,使得空气流动更加聚集,流速更快,升力更大,固定件32沿壳体1的轴线设置,使得两者的轴线共线,固定件32通过支撑杆31与壳体1连接,支撑杆31位于壳体1内壁与固定件32之间,支撑杆31连接在固定件32的中间位置,支撑杆31与水平方向的夹角为0~30
°
,优选为1
°
,进一步优选,支撑杆31与壳体1连接的位置高于支撑杆31与固定件32连接的位置,支撑杆31的数量为多个,并且绕着固定件32的轴线均匀分布,支撑杆31的数量优选为2~5个,支撑杆31的数量进一步优选为3个,此时相邻支撑杆31之间的夹角均为120
°
。
20.滑块5的数量与支撑杆31的数量一一对应,每个滑块5的数量均相等,每个支撑杆31上设置有1个滑块5,滑块5与支撑杆31滑动连接,使得滑块5能够沿着支撑杆31的轴线方向自由滑动,通过调节三个滑块5与固定件32轴线之间的距离来改变本技术变质心共轴双旋翼飞行器的质心位置,从而改变其飞行姿态,为了使滑块5能够准确可靠地在支撑杆31上往复滑动,优选在支撑杆31上安装滑轨311,滑轨311通过滑轨紧固件与支撑杆31紧固连接,滑块5通过滑轨311与支撑杆31滑动连接,滑轨311与支撑杆31同向设置,支撑杆31可以选择为板状结构,以此来降低整体重量,也可以在保证结构强度的前提下在支撑杆31中间位置开设空槽进一步减轻重量,此时滑轨311安装在支撑杆31的上表面,滑块5在支撑杆31的上表面滑动,为了保证滑块5的稳定可靠,优选滑轨311选用工字钢,滑块5的底部则开设有与工字钢配合的滑槽,来实现对滑块5的卡接限位,保证滑块5在滑动时不会掉落或者脱轨;支撑杆31还可以选为密封空腔结构,支撑杆31的一端与壳体1内壁紧密连接,支撑杆31的另一端与固定件32的外壁紧密连接,保证支撑杆31内部与外界隔绝,此时滑轨311安装在支撑杆31的内部,同样滑块5也设置在支撑杆31的内部实现滑动,滑块5与滑轨311卡接限位,这样能够避免外界雨水灰尘对滑块5的腐蚀与磨损,提高飞行器的可靠性与安全性;动力驱动件包括安装在固定件32顶端的第一动力驱动件21和安装在固定件32底部的第二动力驱动件22,对应地,旋翼包括与第一动力驱动件21输出端连接的第一旋翼23和与第二动力驱动件22输出端连接的第二旋翼24,并且第一动力驱动件21、第二动力驱动件22、第一旋翼23和第二旋翼24均与固定件32同轴设置,其中第一旋翼23和第二旋翼24可以选为旋转对称的两叶桨结构或多叶桨均布结构。
21.质心驱动件41安装在固定件32上,质心驱动件41可以选为安装在固定件32的外壁上,也可以选为安装在固定件32的内部,优选安装在固定件32的内部,避免外界雨水的侵蚀,这样,当支撑杆31为空腔结构时与固定件32连通,使得质心驱动件41与滑块5能够避免外界环境对使用寿命的影响;质心驱动件41通过质心驱动连杆42与滑块5连接,质心驱动件
41可以选为舵机,此时质心驱动连杆42对应的可以选为连杆结构,使得舵机转动一定的角度时能够通过连杆结构推动或拉动滑块5向前或者向后滑动,从而实现对滑块5移动位置的调节;质心驱动件41同样还可以选为伸缩杆,此时质心驱动连杆42对应地则为连接杆,伸缩杆与支撑杆31同向设置以便于使得滑块5的移动方向与伸缩杆的伸缩方向相同。
22.对于本领域人员来说,当飞行器不是留系无人机时需要飞行器自带电池7,此时电池7可以安装在固定件32内部来达到对电池7的有效保护,也可以将电池7作为滑块5安装在支撑杆31的内部,此时电池7与质心驱动件41之间通过弹簧结构的线缆进行连接,从而保证电量的有效稳定供应,同时也能够降低本体的自身重量。
23.在使用时,调节三个滑块5与固定件32之间的间距相等,此时本发明飞行器的质心位于壳体1的轴线上,飞行器所受合力矩为0,不进行姿态调整,当飞行器需要改变姿态时,例如调节其中一个滑块5靠近壳体1,此时质心驱动件41通过质心驱动连杆42推动滑块5向前移动靠近壳体1的内壁,从而使得飞行器的质心偏离初始的位置,偏向于移动滑块5的一侧,则飞行器在质心改变后悬停时的平衡被打破,飞行器就会向质心方向倾斜,从而实现对飞行器姿态的调整,结构简单,稳定可靠,操作方便。
24.实施例2与实施例1不同的是,本实施例提供一种变质心共轴双旋翼飞行器,还包括外挂气囊6,外挂气囊6可以为充气气囊,也可以填充其他轻质材料,外挂气囊6套设在壳体1的外侧,使得飞行器降落在水面时保证固定件32底部的第二旋翼位于水面之上,为了提高飞行器在水面起飞与降落的可靠性,质心驱动件41与动力驱动件均选为防水装置,并且在支撑杆31与固定件32之间连接的地方和支撑杆31与外壳1之间连接的地方做防水处理。
25.在使用时,利用外挂气囊6使得飞行器能够漂浮在水面上,起飞时动力驱动件带动旋翼转动来提供向上的升力,从而实现飞行器在水面上的正常起飞,同理,飞行器在降落在水面上时利用外挂气囊6使得飞行器在降落时同样能够漂浮在水面上,同时在防水处理下保证飞行器的安全可靠。
26.实施例3本实施例提供一种变质心共轴双旋翼飞行器的控制方法,包括以下步骤:s1、建立地面坐标系和变质心共轴双旋翼飞行器的机体坐标系;具体的,地面坐标系的原点为任意位置,优选为控制端的位置,x轴与y轴位于水平面,z轴沿竖直方向;机体坐标系的原点为变质心共轴双旋翼飞行器的型心,x、y和z轴的方向与地面坐标系相对应。
27.s2、根据变质心共轴双旋翼飞行器在地面坐标中起始位置和期望位置计算得到期望俯仰角和期望滚转角,进而得到变质心共轴双旋翼飞行器的期望姿态角矢量;s21、滑块5的数量为3个,3个滑块5分别为第一滑块、第二滑块和第三滑块,根据刚体转动定理,得到第一滑块相对于地面坐标系的速度矢量:,其中为变质心共轴双旋翼飞行器相对于地面坐标系的速度矢量,为无人机转
动角速度矢量,为滑块5相对机体坐标系的速度矢量,为滑块5相对机体坐标系的位置矢量;s22、计算得到变质心共轴双旋翼飞行器的质心相对于地面坐标系的速度矢量,具体的:根据质心运动定理有:,进而在机体坐标系下有:其中,为变质心共轴双旋翼飞行器的整体质量,为第一滑块的质量,为中间参数,;s23、设定地面坐标系中变质心共轴双旋翼飞行器的起始位置为,期望位置为,则无人机期望速度表示为:,无人机期望加速度表示为:,其中,、、、、、为pid算法参数,、为积分时间,用于实现抗积分饱和,为当前时刻,为位置跟踪误差,为速度误差;期望加速度进一步表示为:,其中,为期望加速度在地面坐标系对应轴上的分量;进而求出期望俯仰角为和期望滚转角为:;其中,为当前的偏航角大小,为重力加速度;则变质心共轴双旋翼飞行器期望姿态角矢量表示为。
28.s3、根据期望姿态角矢量计算得到期望质心位置在机体坐标系的矢量形式,从而计算得到3个滑块5的目标舵量,来实现对变质心共轴双旋翼飞行器姿态的控制;s31、设定变质心共轴双旋翼飞行器起始的俯仰角为,滚转角为,则起始的姿态
角矢量表示为:,结合变质心共轴双旋翼飞行器期望姿态角矢量为,则变质心共轴双旋翼飞行器期望姿态角速度表示为:变质心共轴双旋翼飞行器期望姿态角加速度表示为:其中,为姿态角的跟踪误差,、、、、和为pid算法参数,、为积分时长,用于实现抗积分饱和,为姿态角速度的跟踪误差;s32、计算变质心共轴双旋翼飞行器期望合力矩:,其中,为变质心共轴双旋翼飞行器的惯性矩阵,为标量对时间求导;通过变质心共轴双旋翼飞行器在机体坐标系下所受到的合力与期望合力矩,由此得出变质心共轴双旋翼飞行器的目标质心相对于机体坐标的矢量形式:其中为变质心共轴双旋翼飞行器的目标质心在机体坐标系中的分量;s33、计算得到第一滑块、第二滑块和第三滑块的目标舵量;设定质心在机体坐标系的位置为,第一滑块、第二滑块和第三滑块当前舵量对应为,则滑块5的舵量与质心位置矢量满足:其中,单个滑块5的质量,为第一滑块、第二滑块或第三滑块距机体坐标系轴最大限位,为第一滑块、第二滑块或第三滑块距机体坐标系轴最小限位,为第一滑
块、第二滑块或第三滑块距机体坐标系面最高限位,为第一滑块、第二滑块或第三滑块距机体坐标系面最低限位;由此,求解得到第一滑块、第二滑块和第三滑块对应的目标舵量,其中分别为第一滑块、第二滑块和第三滑块在机体坐标系中的分量:从而根据目标舵量控制三个对应滑块5的移动距离来实现对变质心共轴双旋翼飞行器飞行姿态的控制。
29.同时,根据矢量求导法则有:当变质心共轴双旋翼飞行器在机体坐标系下所受到的合力为时,可以计算出变质心共轴双旋翼飞行器的加速度:根据动量矩定理有,从而根据矢量求导法则有:进而推导出:则无人机在机体坐标系下的角加速度表示为:。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1