一种夜航机载预警装置的制作方法
1.本发明涉及无人机避障技术领域,具体为一种夜航机载预警装置。
背景技术:
2.随着科学技术的不断发展,无人机在航拍、植保、巡检、警用等领域发挥着巨大的应用价值,但也有一些因素在一定程度上限制着无人机市场的发展,例如避障技术。无人机在不同的应用场景有不同的避障需求,例如无人机在工程场地进行巡检时,需要与建筑主体维持着特殊距离或者角度,以避免可能的碰撞;在隧道等昏暗的场地,需要能主动避开原有障碍物,甚至要能快速躲避如蝙蝠等飞行动物,才能在视线不明的情况下完成巡检任务。
3.现运用较为广泛的视觉避障,类似于双眼目测距离的原理,用两个角度的摄像机来取得物体的不同视角,进行三角测量法计算与物体之间的距离,视觉避障的优点是省电、适用于光线充足的环境,缺点是算法复杂、延迟性高,且不适用于昏暗或光线变化多的情况,辨识度很大程度上取决于物件的反光特性;另外得到广泛运用的激光避障,其原理与红外线避障类似,透过光线折返的时间去计算跟物体之间的距离,以得出3d景深图,其优点是探测距离远、扫描速度快、抗光干扰性佳,但是具有准确度有限及体积过大缺点。
4.现有技术公开的一种智能避障装置及其应用的无人机(cn108427435a),该发明的无人机智能避障装置可以根据飞行速度自动调节避障范围,该装置还可以实现改变无人机的飞行速度,不仅可以使得四个方向的避障范围都能同比例地自动增大或减小,而且可以只是改变飞行方向上的避障距离,却让其他三个方向保持着最小避障距离,使得避障无人机在通过巷道环境时,能很好地提高飞行速度,而不会对两侧的墙体产生非正常的避障效应,但是其缺少能使无人机飞行时保持稳定和灵活转向、准确避障的装置。
技术实现要素:
5.本发明的目的在于提供一种夜航机载预警装置,以解决无人机飞行重心不稳、转向不灵活、避障信息传达不准确、以及飞行旋叶轴上易缠绕异物的问题。
6.为实现上述目的,本发明提供如下技术方案:一种夜航机载预警装置,包括,无人机组件,无人机组件具有上安装板和下安装板,上安装板和下安装板之间设有无人机机臂,无人机机臂周向设有4个,每个无人机机臂的下方设有无人机支架,每个无人机机臂的一端部轴接有飞行旋叶,下安装板上表面中部设有主控制器,下安装板上表面边缘处设有摄像装置,摄像装置周向等距设有4个,下安装板下表面边缘处设有激光测距器,激光测距器周向等距设有4个;一种夜航机载预警装置还包括重心调节组件,重心调节组件设于无人机组件的下方,重心调节组件具有安装基体,安装基体与下安装板的下表面固定连接,安装基体内部设有收卷电机,收卷电机上缠绕设有绳体,安装基体的下方设有第一通孔,绳体的一端部穿过第一通孔,绳体的中上部设有驱动器,驱动器上设有连杆,连杆的两端部设有调节旋叶;该一种夜航机载预警装置通过在无人机组件四周布设激光测距器以及摄像装置,
利用视觉避障和激光避障的组合来提供避障数据和图像,其具有省电、探测距离远、扫描速度快、抗光干扰性佳的特点,以及能够实现多角度测距和测距无死角的功能;重心调整组件的设计,一方面能够在系统判断需要避障时,通过主控制器控制驱动器来驱动调节旋叶,通过控制调节旋叶的转速及调节旋叶的旋叶方向,来达到辅助调整无人机飞行方向和路线的目的;另一方面,调节旋叶带动的气流对无人机组件飞行时其下方的气流具有整流作用,能够避免紊流导致的无人机组件晃动或震动。
7.重心调节组件的下方设有配重组件,配重组件具有配重箱体,配重箱体具有中空结构,配重箱体的顶部开设有第二通孔,绳体的一端部穿过第二通孔并延伸至配重箱体的底部;配重箱体的下方设有配重件,配重件具有底板,底板的中部设有连接柱体,连接柱体具有空心圆柱状结构,连接柱体的一端部与配重箱体的底面固定连接,连接柱体的外侧壁上周向等距设有若干个缓冲弯板,缓冲弯板的底部与底板固定连接;配重组件的设计,一方面能够通过控制收卷电机上绳体的收卷来升高或降低配重组件的位置,进而控制无人机组件底部的重心位置;另一方面,配重组件中的配重箱体能够配合调节旋叶来实现重心调整,具体地,当系统判定需要进行避障时,通过收卷电机收卷绳体,使安装基体、驱动器、配重箱体三者贴合,此时使调节旋叶围绕绳体发生转动,随后其会带动配重箱体转动,进而使配重箱体配合重心调节组件进行重心调整;另一方面,配重组件下方的配重件能够在无人机组件降落时,对无人机组件底部起到防撞缓冲效果,具体地,配重件下方设有的底板可以分散无人机组件降落时的冲击力,并且通过缓冲弯板减对冲击力进行削减,避免过大的冲击力传递到无人机组件上部时,对无人机组件内的核心部件造成损坏。
8.上安装板的上表面中部设有降落伞装置;无人机组件意外坠落时,可以通过降落伞装置对无人机组件进行保护,既使无人机组件在坠落点容易被发现,也能够降低无人机组件坠落后,其核心部件的损坏程度。
9.无人机机臂的一端部下方轴接有防撞组件,防撞组件具有防撞外环,防撞外环具有圆环结构,防撞外环的环体内部同轴设有支撑内环,支撑内环也具有圆环结构,防撞外环与支撑内环之间固定连接有支撑板体;防撞组件的设计,一方面有利于对飞行旋叶进行防护,降低飞行旋叶运行时缠绕到电线、树叶等丝状、线状或片状物的几率,也能够避免其与建筑物墙体或其它坚硬物体发生直接地撞击接触;另一方面,当有碰撞发生时,防撞组件外部设有的防撞外环能够通过自身的形变以及围绕其轴心的旋转,来降低碰撞冲击并且改变撞击点,有助于在碰撞后使无人机组件快速恢复稳定飞行。
10.与现有技术相比,本发明的有益效果是:1.该一种夜航机载预警装置,通过在无人机组件四周布设激光测距器以及摄像装置,利用视觉避障和激光避障的组合来提供避障数据和图像,其具有省电、探测距离远、扫描速度快、抗光干扰性佳的特点,以及能够实现多角度测距和测距无死角的功能;2.该一种夜航机载预警装置,通过重心调整组件的设计,能够通过控制调节旋叶的转速及调节旋叶的旋叶方向,来达到辅助调整无人机飞行方向和路线的目的,也能够避免紊流导致的无人机组件晃动或震动;3.该一种夜航机载预警装置,通过配重组件的设计,能够通过控制收卷电机上绳
体的收卷来升高或降低配重组件的位置,进而控制无人机组件底部的重心位置,也能够通过配重组件下方的配重件在无人机组件降落时,对无人机组件底部起到防撞缓冲效果;4.该一种夜航机载预警装置,通过防撞组件的设计,有利于对飞行旋叶进行防护,而当有碰撞发生时,防撞组件外部设有的防撞外环能够通过自身的形变以及围绕其轴心的旋转,来降低碰撞冲击并且改变撞击点,有助于在碰撞后使无人机组件快速恢复稳定飞行。
附图说明
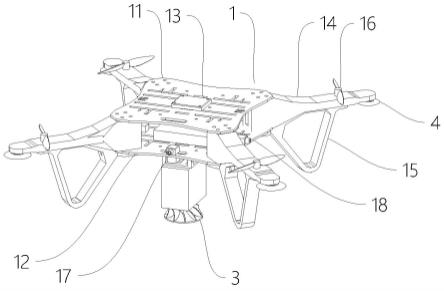
11.图1为本发明提供的一种夜航机载预警装置的一种较佳实施例的结构示意图;图2为图1的主视图;图3为图2的局部剖视图;图4为图3所示
ⅰ‑ⅰ
的放大图;图5为图2所示降落伞装置打开后的结构示意图;图6为图3所示配重件的结构示意图;图7为图1所示防撞组件的结构示意图。
12.图中:1、无人机组件;11、上安装板;12、下安装板;13、降落伞装置;14、无人机机臂;15、无人机支架;16、飞行旋叶;17、激光测距器;18、摄像装置;19、主控制器;2、重心调节组件;21、安装基体;22、收卷电机;23、绳体;24、连杆;25、驱动器;26、调节旋叶;27、第一通孔;3、配重组件;31、配重箱体;32、第二通孔;33、配重件;34、底板;35、缓冲弯板;36、连接柱体;4、防撞组件;41、防撞外环;42、支撑内环;43、支撑板体。
具体实施方式
13.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
14.请参阅图1-4,本发明提供的一种实施例:一种夜航机载预警装置,包括,无人机组件1,无人机组件1具有上安装板11和下安装板12,上安装板11和下安装板12之间设有无人机机臂14,无人机机臂14周向设有4个,每个无人机机臂14的下方设有无人机支架15,每个无人机机臂14的一端部轴接有飞行旋叶16,下安装板12上表面中部设有主控制器19,下安装板12上表面边缘处设有摄像装置18,摄像装置18周向等距设有4个,下安装板12下表面边缘处设有激光测距器17,激光测距器17周向等距设有4个;一种夜航机载预警装置还包括重心调节组件2,重心调节组件2设于无人机组件1的下方,重心调节组件2具有安装基体21,安装基体21与下安装板12的下表面固定连接,安装基体21内部设有收卷电机22,收卷电机22上缠绕设有绳体23,安装基体21的下方设有第一通孔27,绳体23的一端部穿过第一通孔27,绳体23的中上部设有驱动器25,驱动器25上设有连杆24,连杆24的两端部设有调节旋叶26(驱动器25驱动调节旋叶26的方案为现有技术,该现有技术在本领域以及其他领域均有普遍的应用,例如现有专利cn103661899b中的方案,本实施例在此不过多赘述相关现有技术,本领域技术人员应有能力理解);该一种夜航机载预警装置还应包括接收机、pwm转ppm模块、单片机、飞控和程序模
块,其通过激光测距器17和摄像装置18用于探测无人机四个方向与障碍物之间的距离,接收机用于接收无人机组件1的影响飞行速度的pwm信号数值,pwm转ppm模块用于根据影响飞行速度的pwm信号数值确定避障距离,所述单片机用于数据处理;其具体连接结构为:激光测距器17和摄像装置18连接单片机、单片机和接收机分别连接pwm转ppm模块,pwm转ppm模块连接飞控和程序模块;该一种夜航机载预警装置通过在无人机组件1四周布设激光测距器17以及摄像装置18,利用视觉避障和激光避障的组合来提供避障数据和图像,其具有省电、探测距离远、扫描速度快、抗光干扰性佳的特点,以及能够实现多角度测距和测距无死角的功能;重心调整组件的设计,一方面能够在系统判断需要避障时,通过主控制器19控制驱动器25来驱动调节旋叶26,通过控制调节旋叶26的转速及调节旋叶26的旋叶方向,来达到辅助调整无人机飞行方向和路线的目的;另一方面,调节旋叶26带动的气流对无人机组件1飞行时其下方的气流具有整流作用,能够避免紊流导致的无人机组件1晃动或震动。
15.请参阅图1-4、图6,重心调节组件2的下方设有配重组件3,配重组件3具有配重箱体31,配重箱体31具有中空结构,配重箱体31的顶部开设有第二通孔32,绳体23的一端部穿过第二通孔32并延伸至配重箱体31的底部;配重箱体31的下方设有配重件33,配重件33具有底板34,底板34的中部设有连接柱体36,连接柱体36具有空心圆柱状结构,连接柱体36的一端部与配重箱体31的底面固定连接,连接柱体36的外侧壁上周向等距设有若干个缓冲弯板35,缓冲弯板35的底部与底板34固定连接;配重组件3的设计,一方面能够通过控制收卷电机22上绳体23的收卷来升高或降低配重组件3的位置,进而控制无人机组件1底部的重心位置;另一方面,配重组件3中的配重箱体31能够配合调节旋叶26来实现重心调整,具体地,当系统判定需要进行避障时,通过收卷电机22收卷绳体23,使安装基体21、驱动器25、配重箱体31三者贴合,此时使调节旋叶26围绕绳体23发生转动,随后其会带动配重箱体31转动,进而使配重箱体31配合重心调节组件2进行重心调整;另一方面,配重组件3下方的配重件33能够在无人机组件1降落时,对无人机组件1底部起到防撞缓冲效果,具体地,配重件33下方设有的底板34可以分散无人机组件1降落时的冲击力,并且通过缓冲弯板35减对冲击力进行削减,避免过大的冲击力传递到无人机组件1上部时,对无人机组件1内的核心部件造成损坏。
16.请参阅图5,上安装板11的上表面中部设有降落伞装置13;无人机组件1意外坠落时,可以通过降落伞装置13对无人机组件1进行保护,既使无人机组件1在坠落点容易被发现,也能够降低无人机组件1坠落后,其核心部件的损坏程度。
17.请参阅图1、图7无人机机臂14的一端部下方轴接有防撞组件4,防撞组件4具有防撞外环41,防撞外环41具有圆环结构,防撞外环41的环体内部同轴设有支撑内环42,支撑内环42也具有圆环结构,防撞外环41与支撑内环42之间固定连接有支撑板体43;防撞组件4的设计,一方面有利于对飞行旋叶16进行防护,降低飞行旋叶16运行时缠绕到电线、树叶等丝状、线状或片状物的几率,也能够避免其与建筑物墙体或其它坚硬物体发生直接地撞击接触;另一方面,当有碰撞发生时,防撞组件4外部设有的防撞外环41能够通过自身的形变以及围绕其轴心的旋转,来降低碰撞冲击并且改变撞击点,有助于在碰撞后使无人机组件1快速恢复稳定飞行。
18.工作原理:该一种夜航机载预警装置中的无人机组件1在飞行过程中,其通过单片机采集激光测距器17和摄像装置18的信息,实时探测前方障碍物的距离,并且将pwm信号数值传输给接收机;在接收机接收到影响无人机组件1飞行速度的pwm信号数值后,将其传输给pwm转ppm模块;随后pwm转ppm模块读取影响飞行速度的pwm信号数值,并根据比例算法运算得到避障距离;然后pwm转ppm模块根据避障距离和来自单片机测得的装置与障碍物之间的距离,进行比较运算,判断是否对飞行安全构成了威胁,并输出智能避障飞行信息;飞控和程序模块接收到pwm转ppm模块的智能避障飞行信息后,输出电信号到主控制器19,由主控制器19调整无人机组件1进行智能避障。
19.对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1