一种基于折叠式旋翼的定点回收探空火箭及回收方法
1.本发明属于火箭技术领域,具体涉及一种定点回收探空火箭及回收方法。
背景技术:
2.探空火箭是在近地空间进行探测和科学试验的火箭,它可以探测大气层成分、研究太阳射线,甚至实现人工影响天气。同时,探空火箭还可以作为航空航天类学生的教学工具,使学生更好的理解课程知识。以上特点决定了探空火箭的成本较高,因而有必要对探空火箭进行回收,特别是定点回收。定点回收可以避免火箭坠入居民区或水中等位置,以免造成不必要的伤亡和损失。
3.现有技术中关于火箭回收方式如下:
4.1).降落伞回收
5.实用新型专利“低空探空火箭”(200920245601.3)中介绍了一种可携带探空仪器的低空探空火箭,其采用从箭体侧面打开的降落伞进行回收。该回收方式简单,但受风的影响较大,火箭会落在一个较大的范围里面,无法实现定点回收。
6.2).发动机反推回收
7.如图2所示,发明专利“火箭回收装置和液体火箭”(202010370000.6)公布了一种采用火箭发动机和栅格舵进行回收的液体火箭。该回收方式要求携带多余的推进剂使火箭减速下降,并且需要二次点火功能,并不适合于探空火箭。因为探空火箭通常采用固液混合发动机或固体火箭发动机,很难实现矢量推力和二次点火。
8.3).旋翼回收
9.如图3所示,发明专利“一种基于定点识别的模型火箭装置及定点识别方法”公布了一种采用旋翼动力实现模型火箭定点回收的装置和方法。该方法将模型火箭头部与箭体分离,只对头部进行定点回收,箭体自由下落时较大的存在安全隐患。并且该方法的旋翼不能折叠进箭体,在探空火箭高速飞行时会产生极大的气动阻力,并且外露的螺旋桨和机臂存在折断的危险。同时该专利采用的空心杯电机功率小,无法支持探空火箭的重量,因而只能在小型模型火箭上使用。
技术实现要素:
10.为了克服现有技术的不足,本发明提供了一种基于折叠式旋翼的定点回收探空火箭及回收方法,包括头锥、旋翼舱段、航电舱段、发动机舱段、尾翼和连接件;在火箭起飞后回收之前,旋翼动力系统折叠进旋翼舱段中;火箭回收时,飞行控制器控制降落伞打开和旋翼动力系统展开,作动机构驱动机臂同时带动螺旋桨和无刷电机向旋翼舱段外展开,当机臂与水平面平行时,机臂停止展开并锁死;飞行控制器通过无刷电机控制螺旋桨旋转,调整火箭姿态并带动火箭向回收区域运动。本发明可以使火箭飞行高度更高,弹道更加平滑稳定,并提高火箭的回收精度。
11.本发明解决其技术问题所采用的技术方案包括如下步骤:
12.一种基于折叠式旋翼的定点回收探空火箭,包括头锥、旋翼舱段、航电舱段、发动机舱段、尾翼和连接件;所述头锥、旋翼舱段、航电舱段和发动机舱段从上向下依次固定连接;所述尾翼通过连接件固定在发动机舱段上;
13.所述头锥中放置降落伞,用于探空火箭在回收时的减速与稳定;
14.所述旋翼舱段中放置有4套旋翼动力系统;所述旋翼动力系统包括作动机构、螺旋桨、无刷电机和机臂;所述无刷电机固定在机臂上,无刷电机驱动螺旋桨旋转;所述作动机构能够驱动机臂向外展开;
15.所述航电舱段中放置uwb模块、gps模块、上隔板、飞行控制器、电池、支杆、下隔板和有效载荷;所述uwb模块和gps模块放置在上隔板上;所述gps模块负责接收卫星信号,提供火箭的绝对位置信息,作用在回收过程全程;所述uwb模块负责接收火箭与地面站的相对位置信息,并与火箭的绝对位置信息融合,在回收过程的最后阶段获取火箭的位置信息;所述飞行控制器用于接收位置信息和给出控制指令,控制降落伞的打开、机臂的展开、螺旋桨的启停及调整火箭回收时姿态与位置;所述电池为飞行控制器和无刷电机提供电源;所述飞行控制器和电池固定在下隔板上;所述支杆安装在上隔板和下隔板之间,用于固定上隔板和下隔板;所述有效载荷负责采集与发射任务有关的数据;
16.所述发动机舱段内安装火箭发动机,用来推动火箭上升;
17.所述尾翼用来保持火箭上升时的稳定性;
18.在火箭起飞后回收之前,所述旋翼动力系统折叠进旋翼舱段中;火箭回收时,飞行控制器控制降落伞打开和旋翼动力系统展开,作动机构驱动机臂同时带动螺旋桨和无刷电机向旋翼舱段外展开,当机臂与水平面平行时,机臂停止展开并锁死;飞行控制器通过无刷电机控制螺旋桨旋转,调整火箭姿态并带动火箭向回收区域运动。
19.优选地,所述在回收过程的最后阶段为距离回收区10m以内。
20.一种基于折叠式旋翼的定点回收探空火箭回收方法,包括如下步骤:
21.步骤1:探空火箭安放于发射架之上,旋翼动力系统折叠进旋翼舱段中;此时地面站接收到飞行控制器发送给地面端数传的飞行状态信息,进行火箭发射;
22.步骤2:当飞行控制器通过火箭上的气压计bro检测到火箭已经越过最高点并开始下落时,打开位于头锥的降落伞;降落伞打开后,将火箭的姿态拉直并开始减速;
23.步骤3:当飞行控制器通过火箭上的惯性测量单元imu检测到火箭开始匀速下落时,发送控制指令到作动机构,作动机构驱动机臂展开,当机臂与水平面平行时锁死;
24.步骤4:当机臂锁死后,螺旋桨开始转动;飞行控制器根据gps模块、惯性测量单元imu、气压计bro、火箭上的磁力计mag提供的信息,解析飞机当前姿态、速度和位置;
25.步骤5:根据回收区位置信息与火箭当前位置信息,飞行控制器输出pwm信号至4个无刷电机,4个无刷电机的不同转速会使螺旋桨产生不同的升力,控制火箭调整姿态和速度,飞向回收区域;
26.步骤6:根据gps模块提供的位置信息,当火箭距离回收区域中心距离小于10m时,飞行控制器融合uwb位置信息,将融合后的位置信息作为火箭的导航定位信息;
27.步骤7:当飞行控制器检测到火箭降落至地面以后,停止向无刷电机发送pwm信号,无刷电机停止转动,回收过程结束。
28.本发明的有益效果如下:
29.1).在火箭上升段,将机臂及旋翼折叠进箭体会极大降低火箭的阻力及气动干扰,可以使火箭飞行高度更高,弹道更加平滑稳定。
30.2).将火箭整体定点回收可以节约发射成本、避免非定点回收方式对地面财产造成危害。
31.3).gps用于提供火箭的低精度位置信息,uwb用于提供火箭回收末端的高精度位置信息,采用gps+uwb的定位方式可以提高火箭的回收精度。
附图说明
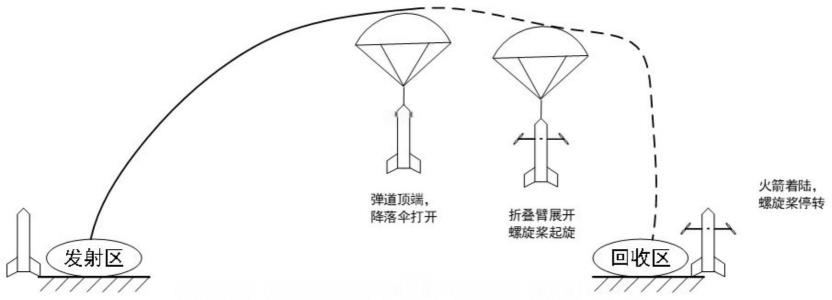
32.图1为本发明探空火箭发射及回收流程。
33.图2为发动机反推回收方式。
34.图3为模型火箭旋翼回收方式。
35.图4为本发明折叠式旋翼定点回收探空火箭外形图。
36.图5为本发明航电舱内部结构图。
37.图6为本发明旋翼回收火箭控制流程图。
38.附图说明:1-头锥,2-旋翼舱段,3-航电舱段,4-发动机舱段,5-尾翼,6-连接件,21-螺旋桨,22-无刷电机,23-机臂,31-uwb模块,32-gps模块,33-上隔板,34-飞行控制器,35-电池,35-支杆,37-下隔板,38-有效载荷。
具体实施方式
39.下面结合附图和实施例对本发明进一步说明。
40.为解决现有探空火箭回收精度低、气动阻力大的问题,本发明提出一种基于折叠式旋翼的定点回收探空火箭及回收方法,其解决的问题与采用的方式具体如下:
41.1)为解决火箭回收精度低的问题,采用gps获取火箭全球低精度位置信息,uwb获取火箭相对地面基站高精度位置信息,使用旋翼动力控制火箭降落至回收区域。
42.2)为解决外露旋翼在火箭上升段的阻力及气动干扰问题,采用折叠式旋翼,在火箭下降段打开折叠机臂并进行控制。
43.本发明提出的基于折叠式旋翼的定点回收探空火箭及回收方法的实现方式如图1所示,包括火箭从发射区发射、降落伞打开、机臂自动展开和火箭着陆。降落伞应当在弹道最高点附近打开,以减小开伞对火箭的冲击;机臂展开后,螺旋桨开始旋转,对火箭的姿态和速度进行控制;在火箭降落到地面后,螺旋桨停止工作。
44.一种基于折叠式旋翼的定点回收探空火箭,包括头锥1、旋翼舱段2、航电舱段3、发动机舱段4、尾翼5和连接件6;所述头锥1、旋翼舱段2、航电舱段3和发动机舱段4从上向下依次固定连接;所述尾翼5通过连接件6固定在发动机舱段4上;
45.所述头锥1中放置降落伞,用于探空火箭在回收时的减速与稳定;
46.所述旋翼舱段2中放置有4套旋翼动力系统;所述旋翼动力系统包括作动机构、螺旋桨21、无刷电机22和机臂23;所述无刷电机22固定在机臂23上,无刷电机22驱动螺旋桨21旋转;所述作动机构能够驱动机臂23向外展开;
47.所述航电舱段3中放置uwb模块31、gps模块32、上隔板33、飞行控制器34、电池35、支杆36、下隔板37和有效载荷38;所述uwb模块31和gps模块32放置在上隔板33上;所述gps
模块32负责接收卫星信号,提供火箭的绝对位置信息,作用在回收过程全程;所述uwb模块31负责接收火箭与地面站的相对位置信息,并与火箭的绝对位置信息融合,在回收过程的最后阶段获取火箭的位置信息;所述飞行控制器34用于接收位置信息和给出控制指令,控制降落伞的打开、机臂23的展开、螺旋桨21的启停及调整火箭回收时姿态与位置;所述电池35为飞行控制器34和无刷电机22提供电源;所述飞行控制器34和电池35固定在下隔板37上;所述支杆36安装在上隔板33和下隔板37之间,用于固定上隔板33和下隔板37;所述有效载荷38负责采集与发射任务有关的数据;
48.所述发动机舱段4内安装火箭发动机,用来推动火箭上升;
49.所述尾翼5用来保持火箭上升时的稳定性;
50.在火箭起飞后回收之前,所述旋翼动力系统折叠进旋翼舱段2中;火箭回收时,飞行控制器34控制降落伞打开和旋翼动力系统展开,作动机构驱动机臂23同时带动螺旋桨21和无刷电机22向旋翼舱段2外展开,当机臂23与水平面平行时,机臂23停止展开并锁死;飞行控制器34通过无刷电机22控制螺旋桨21旋转,调整火箭姿态并带动火箭向回收区域运动。
51.一种基于折叠式旋翼的定点回收探空火箭回收方法,包括如下步骤:
52.步骤1:探空火箭安放于发射架之上,旋翼动力系统折叠进旋翼舱段2中;此时地面站接收到飞行控制器34发送给地面端数传的飞行状态信息,进行火箭发射;
53.步骤2:当飞行控制器34通过火箭上的气压计bro检测到火箭已经越过最高点并开始下落时,打开位于头锥1的降落伞;降落伞打开后,将火箭的姿态拉直并开始减速;
54.步骤3:当飞行控制器34通过火箭上的惯性测量单元imu检测到火箭开始匀速下落时,发送控制指令到作动机构,作动机构驱动机臂23展开,当机臂23与水平面平行时锁死;
55.步骤4:当机臂23锁死后,螺旋桨21开始转动;飞行控制器根据gps模块、惯性测量单元imu、气压计bro、火箭上的磁力计mag提供的信息,解析飞机当前姿态、速度和位置;
56.步骤5:根据回收区位置信息与火箭当前位置信息,飞行控制器输出pwm信号至4个无刷电机22,4个无刷电机22的不同转速会使螺旋桨21产生不同的升力,控制火箭调整姿态和速度,飞向回收区域;
57.步骤6:根据gps模块32提供的位置信息,当火箭距离回收区域中心距离小于10m时,飞行控制器融合uwb位置信息,将融合后的位置信息作为火箭的导航定位信息;
58.步骤7:当飞行控制器34检测到火箭降落至地面以后,停止向无刷电机22发送pwm信号,无刷电机22停止转动,回收过程结束。
59.具体实施例:
60.如图4所示,本实施例提出的探空火箭由以下几个部分组成:头锥1、旋翼舱段2、航电舱段3、发动机舱段4、尾翼5和连接件6。头锥1中放置降落伞,用于探空火箭的减速与稳定;旋翼舱段2中放置有4套旋翼动力系统,包括螺旋桨21、无刷电机22和机臂23,其在火箭姿态稳定后自动展开并启动;航电舱段3中放置探空火箭飞行控制器和有效载荷,飞行控制器可以控制降落伞的打开、机臂23的展开、螺旋桨21的启动停止与火箭回收时的姿态与位置;发动机舱4段内有火箭发动机,用来推动火箭上升至指定高度;尾翼5用来保持火箭上升时的稳定性;连接件6用来连接尾翼5与发动机舱段4。
61.在起飞之前,旋翼动力系统折叠进箭体,在接收到飞行控制器34指令后展开。展开
时,旋翼舱段2内的作动机构驱动机臂23(同时带动螺旋桨21和无刷电机22)向外展开,当机臂23与水平面平行时,运动停止并锁死。然后螺旋桨21在飞行控制器的控制下开始旋转,调整火箭姿态并带动火箭向回收区域运动。
62.如图5所示,航电舱段3是探空火箭的核心舱段,它负责采集有效数据和控制火箭回收,其内部结构如图5所示,包括uwb模块31、gps模块32、上隔板33、飞行控制器34、电池35、支杆36、下隔板37和有效载荷38。其中uwb模块31负责接收与地面基站的相对位置信息,并与gps位置信息融合,转换为火箭的高精度位置信息,用于回收过程的最后阶段(距回收区10m以内);gps模块32负责接收卫星信号,提供火箭的绝对位置信息,用于回收过程全程;上隔板33用来放置uwb模块31和gps模块32;飞行控制器34用于接收位置信息和给出控制指令,控制降落伞的打开、机臂23的展开,并调整火箭姿态与位置;电池35为飞行控制器34和无刷电机22提供电源;支杆36用于紧固上隔板33和下隔板37;下隔板37用于放置飞行控制器34和电池35;有效载荷38负责采集与发射任务有关的数据。
63.火箭的控制流程如图6所示,主要包括地面站s1、数传s2、飞行控制中心s3即飞行控制器34、开伞机构s4、机臂展开机构s5和无刷电机m1、m2、m3、m4。其中地面站s1通过数传s2向飞行控制中心s3发送控制指令,并接收来自飞行控制器s3的飞行状态信息;数传s2是连接地面站s1与飞行控制中心s3的“桥梁”,负责消息接收与发送;飞行控制中心s3对来自不同传感器的信息进行处理,包括gps、uwb、惯性测量单元imu、气压计bro和磁力计mag,并输出pwm控制信号给电机;电机接收到信号后,以各自的速度进行运转,控制火箭的姿态和速度。
64.首先,探空火箭处于折叠状态安放于发射架之上,此时地面站s1可以接收到飞行控制中心s3发送给数传s2的飞行状态信息,若火箭状态良好,则可以进行发射。
65.当飞行控制中心s3通过气压计bro检测到火箭已经越过最高点并开始下落时,发送控制指令给开伞机构s4,打开位于头锥1的降落伞。降落伞打开后,将火箭的姿态拉直并开始减速。当飞行控制中心s3通过imu检测到火箭开始匀速下落时,发送控制指令到机臂展开机构s5,机臂将展开并当机臂23与水平面平行时锁死。
66.机臂23到位并锁死之后,螺旋桨21开始转动。飞行控制中心s3将根据gps、惯性测量单元imu、气压计bro、磁力计mag提供的信息,解析飞机当前姿态、速度和位置。根据回收区位置信息与火箭当前位置信息,飞行控制中心s3输出pwm信息至无刷电机m1、m2、m3、m4,电机的不同转速会产生不同的升力,控制火箭调整姿态和速度,飞向回收区域。
67.根据gps提供的位置信息,当火箭距离回收区中心距离小于10m时,飞行控制中心s3将开始融合uwb位置信息,将融合后的高精度位置信息作为火箭的导航定位信息。当飞控控制器s3检测到火箭降落至地面以后,停止向发送电机发送pwm信息,电机将停止转动,回收过程结束。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1