一种直接驱动前轮的舰载机用牵引车
1.本发明涉及舰载机牵引车技术领域,特别涉及一种直接驱动前轮的舰载机用牵引车。
背景技术:
2.航母舰载机的出动和回收直接关系到航母的作战能力,而舰载机在航母甲板上的调度离不开牵引车的转运,舰载机牵引车是一种重要的航空地面保障专用设备,因此,改进舰载机牵引车的工作方式并提高整体的航母甲板运作效率,契合中国人民解放军“积极防御”的战略需求。
3.对于现有的舰载机牵引车,从牵引形式上可分为有杆牵引车和无杆牵引车;但目前我军航母装备的有杆牵引车存在体积和重量都较大的缺陷,在空间宝贵的飞行甲板上只能少量放置4-5辆,使得舰载机的转运时间长,而且在高海况条件下需要降低牵引车运行速度,调度效率和操作容错率进一步降低。现有的无杆牵引车能克服以上问题,但也存在造价昂贵、结构复杂、易发生故障的缺点。
技术实现要素:
4.为解决上述背景技术提到的问题:航母装备的有杆牵引车体积和重量都较大的缺陷,使得舰载机的转运时间长、牵引效率低;无杆牵引车存在造价昂贵、结构复杂等缺点。本发明提供的一种直接驱动前轮的舰载机用牵引车,其包括框架、设于框架内的电力驱动机构、与电力驱动机构输出端连接的驱动盘、与电力驱动机构电连接的电控器、与电控器电连接的外接电源线;
5.所述驱动盘上设有连接结构,其可通过所述连接结构与舰载机的机轮可拆卸固定连接,以使所述电力驱动机构驱动所述驱动盘转动从而带动机轮转动;所述框架上设有锁定件,其通过锁定件与舰载机前起落架可拆卸固定连接;
6.所述外接电源线的输入接口与舰载机上的电力接口相匹配,以使所述舰载机上apu与牵引车通过外接电源线电连接。
7.在一实施例中,还包括安设于框架上的遥控天线;所述遥控天线与电控器电连接。
8.在一实施例中,所述驱动盘一端与电力驱动机构输出端连接,其另一端设有连接结构;所述连接结构为套筒,且所述套筒内孔的内壁上设有与机轮轮毂的螺柱相匹配的螺纹,通过套筒上的螺纹与机轮轮毂的螺柱嵌合,以使驱动盘与机轮可拆卸固定连接。
9.在一实施例中,所述驱动盘为由若干辐条组成的多辐结构,每一所述辐条末端均设有所述套筒。
10.在一实施例中,所述锁定件为锁环结构,其包括套环和插栓;所述套环由两个可开合的弧形件组成,两个所述弧形件的末端均设有插口,通过插栓插入插口内以使两个弧形件圈围形成闭合环状结构的所述套环;且闭合的所述套环的内圈与舰载机前起落架的减震支柱内筒适配,通过套环圈合于所述减震支柱内筒外壁上,以使框架通过锁定件与舰载机
前起落架可拆卸固定连接。
11.在一实施例中,所述锁定件与框架可拆卸连接。
12.在一实施例中,所述套环的内孔壁上设有弹性缓冲垫。
13.在一实施例中,所述框架上远离驱动盘的一端设有后支撑轮组件,且所述框架的两侧边分别设有前支撑轮组件。
14.在一实施例中,所述后支撑轮组件包括第一轮架与架设于第一轮架上的后滚轮,所述前支撑轮组件包括第二轮架与设于第二轮架上的前滚轮;所述第一轮架和第二轮架与框架转动连接,所述第一轮架和第二轮架可转动以使后滚轮和前滚轮抬起离地,并通过固定件使第一轮架和第二轮架固定连接于所述框架上。
15.在一实施例中,所述框架上设有把手。
16.基于上述,与现有技术相比,本发明提供的一种直接驱动前轮的舰载机用牵引车,具有以下技术效果:
17.该牵引车具有结构简单、技术可靠、成本低廉、体积和重量均较小使其可大量装备的优点,解决现有产品操作时间长、牵引效率低的问题。
18.本发明的其它特征和有益效果将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他有益效果可通过在说明书、权利要求书以及附图中所特别指出的结构来实现和获得。
附图说明
19.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作一简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图;在下面描述中附图所述的位置关系,若无特别指明,皆是图示中组件绘示的方向为基准。
20.图1为本发明提供的一实施例中锁定件打开状态下的俯视图;
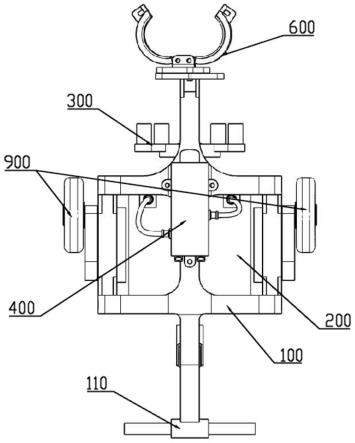
21.图2为本发明提供的一实施例中锁定件打开状态下的正视图;
22.图3为本发明提供的一实施例中锁定件打开状态下的立体图;
23.图4为本发明提供的一实施例中锁定件闭合状态下的俯视图;
24.图5为本发明提供的一实施例中锁定件闭合状态下的正视图;
25.图6为本发明提供的一实施例中锁定件闭合状态下的立体图;
26.图7为本发明一实施例提供的牵引车与舰载机前起落架连接过程示意图一;
27.图8为本发明一实施例提供的牵引车与舰载机前起落架连接过程示意图二;
28.图9为本发明一实施例提供的牵引车与舰载机前起落架连接过程示意图三;
29.图10为本发明一实施例提供的牵引车与舰载机前起落架连接状态下的结构示意图;
30.图11为本发明提供的一实施例中锁定件安装过程示意图一;
31.图12为本发明提供的一实施例中锁定件安装过程示意图二;
32.图13为本发明提供的一实施例中锁定件安装过程示意图三。
33.附图标记:
34.100框架
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
200电力驱动机构
ꢀꢀꢀꢀꢀ
300驱动盘
35.400电控器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
500外接电源线
ꢀꢀꢀꢀꢀꢀꢀ
600锁定件
36.700遥控天线
ꢀꢀꢀꢀꢀꢀꢀ
800后支撑轮组件
ꢀꢀꢀꢀꢀ
900前支撑轮组件
37.110把手
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
310套筒
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
320辐条
38.610套环
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
611弧形件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
612插口
39.620插栓
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
630弹性缓冲垫
ꢀꢀꢀꢀꢀꢀꢀ
810第一轮架
40.820后滚轮
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
910第二轮架
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
920前滚轮
41.20前起落架
ꢀꢀꢀꢀꢀꢀꢀꢀ
22机轮
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
21减震支柱内筒
42.10牵引车
具体实施方式
43.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例;下面所描述的本发明不同实施方式中所设计的技术特征只要彼此之间未构成冲突就可以相互结合;基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
44.在本发明的描述中,需要说明的是,本发明所使用的所有术语(包括技术术语和科学术语)具有与本发明所属领域的普通技术人员通常所理解的含义相同的含义,不能理解为对本发明的限制;应进一步理解,本发明所使用的术语应被理解为具有与这些术语在本说明书的上下文和相关领域中的含义一致的含义,并且不应以理想化或过于正式的意义来理解,除本发明中明确如此定义之外。
45.本发明提供如图1-13实施例所示的一种直接驱动前轮的舰载机用牵引车10,其包括框架100、设于框架100内的电力驱动机构200、与电力驱动机构200输出端连接的驱动盘300、与电力驱动机构200电连接的电控器400、与电控器400电连接的外接电源线500;
46.所述驱动盘300上设有连接结构,其可通过所述连接结构与舰载机的机轮22可拆卸固定连接,以使所述电力驱动机构200驱动所述驱动盘300转动从而带动机轮22转动;所述框架100上设有锁定件600,其通过锁定件600与舰载机前起落架20可拆卸固定连接;
47.所述外接电源线500的输入接口与舰载机上的电力接口相匹配,以使所述舰载机上apu与牵引车10通过外接电源线500电连接。其中,所述电力驱动机构200可选用电机;优选地,其还包括安设于框架100上的遥控天线700;所述遥控天线700与电控器400电连接。
48.如图1-13所示,本发明提供的牵引车10是一个整体附着在舰载机前起落架20上的结构,通过驱动盘300与机轮22可拆卸固定连接,用电力驱动机构200驱动所述驱动盘300转动从而直接带动舰载机的前轮向前或向后旋转,从而使舰载机在甲板上自主前后滑行或转弯;
49.具体地,该牵引车10设置外接电源线500,该外接电源线500的输入接口与舰载机上的电力接口相匹配,可与舰载机上的电力接口相连接,通过外接电源线500传输由apu提供的用于驱动前起落架20机轮22的电力,同时,其也可在地勤人员使用遥控驾驶模式下向舰载机机身发送控制信号,调整起落架的转向角度;该牵引车10的电控器400与外接电源线
500和电力驱动机构200电连接(其中,本实施例中,通过电机导线连接电控器400与电力驱动机构200以输送电力),该电控器400能够控制强电输入功率,具有过载、欠载、漏电、堵转等保护功能;还具有解析弱电控制信号输出,交流数据,承受指令等功能,通过电控器400可控制电力驱动机构200的运行状态,从而控制驱动盘300的运行,以带动舰载机的机轮22转动;另外,该牵引车10还优选设置有遥控天线700,其与电控器400电连接,遥控天线700用以接收来自地勤人员的遥控器以及塔台发出的无线电遥控信号,从而使得牵引车10接收无线电遥控信号,并根据信号信息调整电力驱动机构200的运行状态。
50.使用时,如图7-9所示,牵引车10与舰载机前起落架20连接操作流程为:
51.首先,地勤人员推动牵引车10至舰载机前起落架20一侧,将驱动盘300与舰载机前起落架20上的机轮22固定连接;然后,将锁定件600与舰载机前起落架20可拆卸固定连接;最后,将外接电源线500接入舰载机上的电力接口,即可开始随行驾驶或告知飞行员开始自主驾驶。同理,解除连接的操作为以上步骤的倒序。
52.本发明中,牵引车10只有一个用于驱动舰载机前轮的电力驱动机构200,自身不携带电源,也不具备驱动自身移动的能力;并且使用的电源来自舰载机自身的apu,通过外接电源线500为牵引车10供电。
53.相比起有杆牵引车10,无杆牵引车10结构更紧凑,转弯半径小,速度高,而且无杆牵引车10在抱起舰载机的前轮时,后轴大约要承载舰载机总质量的10%,因此无需较大的自重就能提供足够的地面附着力,这对舰载设施意义重大。与现有的无杆牵引车10相比,本发明的创新点和有益效果在于:
54.1.本发明提供的牵引车10使用电动驱动机构直接驱动舰载机前轮的动力传导方式:此方式结构更简单,自重更小轻,避免了无杆牵引车10抱轮机构的结构复杂和成本高的缺点;
55.2.本发明提供的牵引车10由舰载机的apu提供电源,避免携带重量较大的电池,没有续航和更换电池的问题;
56.3.本发明提供的牵引车10与舰载机的对接程序简单(对接程序:电动驱动机构的驱动盘300与舰载机的机轮22直接固定连接,外接电源线500连接舰载机的电力接口,锁定件600固定连接舰载机前起落架20),且其结构简单,体积和重量均较小,其可在航母上大量装备,做到每一架舰上飞机的前轮都连接着一架牵引车10,飞机只要启动apu就能进行转移,使用灵活,提高甲板调度的容错率;
57.4.牵引车10体积和重量都较小,在与舰载机脱离时,可以由单人推动进行转移。
58.5.可以由飞行员操控牵引车10向前自主滑行,机轮22转向由飞行员操纵,也能实现倒车进入停机位的运动;同时也允许由地面辅助人员进行遥控操作,兼容性好。
59.需要说明的是:本文所述apu为auxiliary power unit,意思是辅助动力装置;它的核心是一台小型的涡轮发动机,是除飞机主发动机外的一台动力装置,它的作用是向飞机独立的提供电源和压缩空气,也有一些apu可以提供附加推力。本发明提供的牵引车10使用时需要对现有某些舰载机进行一定程度的改装:在前起落架20附近区域预留电力接口;调整apu的功率分配系统以使其通过外接电源线500为牵引车10供电。
60.本发明中的所述电控器400、电力驱动机构200、遥控天线700等为现有装置,其构造和工作原理此处不再累述,根据上述设计构思,本领域技术人员可根据需要进行适用性
选型。
61.优选地,所述驱动盘300一端与电力驱动机构200输出端连接,其另一端设有连接结构;所述连接结构为套筒310,且所述套筒310内孔的内壁上设有与机轮22轮毂的螺柱相匹配的螺纹,通过套筒310上的螺纹与机轮22轮毂的螺柱嵌合,以使驱动盘300与机轮22可拆卸固定连接。优选地,所述驱动盘300为由若干辐条320组成的多辐结构,每一所述辐条320末端均设有所述套筒310。
62.如图7-9所示,采用的驱动盘300为与电力驱动机构200输出轴连接的多辐结构,每个辐条320末端有一个可以向前旋进的套筒310,通过套筒310内壁的螺纹与机轮22轮毂的螺柱嵌合以形成驱动盘300与机轮22的固定连接。牵引车10的驱动盘300与机轮22连接后,电力驱动机构200输出轴驱动该驱动盘300旋转可以直接带动机轮22旋转。
63.需要说明的是:本实施例中,驱动盘300采用的是五辐结构,套筒310也为5个;根据上述设计构思,本领域技术人员可根据实际情况对辐条320数量进行适用性调整,包括但不限于实施例方案;上述结构的驱动盘300使用时需要对现有某些舰载机进行一定程度的改装:替换前机轮22轮毂的螺钉,使其具有可以与牵引车10驱动盘300连接的螺柱。
64.优选地,所述锁定件600为锁环结构,其包括套环610和插栓620;所述套环610由两个可开合的弧形件611组成,两个所述弧形件611的末端均设有插口612,通过插栓620插入插口612内以使两个弧形件611圈围形成闭合环状结构的所述套环610;且闭合的所述套环610的内圈与舰载机前起落架20的减震支柱内筒21适配,通过套环610圈合于所述减震支柱内筒21外壁上,以使框架100通过锁定件600与舰载机前起落架20可拆卸固定连接。优选地,所述插栓620为u形结构。
65.如图1-13所示,锁定件600为锁环结构,其中的套环610由可开合的两个的弧形件611组成,能合起来以圈合舰载机前起落架20的减震支柱内筒21,锁定件600成为牵引车10框架100与舰载机起落架的一个固定点,抵御驱动机轮22旋转时产生的反扭力。两个的弧形件611合起时,通过插栓620插入弧形件611的插口612内以使两个弧形件611闭合;拔出插栓620即可将两个弧形件611向两边打开。如此设置,使框架100通过锁定件600与舰载机前起落架20可拆卸固定连接。
66.优选地,所述锁定件600与框架100可拆卸连接。
67.不同机型起落架结构存在不同,所述锁定件600有针对不同机型起落架的适配形制,设置锁定件600与框架100可拆卸连接,锁定件600可替换安装到牵引车10框架100上,便于使用(本实施例是歼15的适配版本)。
68.优选地,所述套环610的内孔壁上设有弹性缓冲垫630。进一步优选地,所述弹性缓冲垫630可采用橡胶垫。
69.如图11-13所示,套环610的内孔壁上设有橡胶垫,保护减震支柱内筒21的金属表面不受磕碰刮损。
70.优选地,所述框架100上远离驱动盘300的一端设有后支撑轮组件800,且所述框架100的两侧边分别设有前支撑轮组件900。
71.优选地,所述后支撑轮组件800包括第一轮架810与架设于第一轮架810上的后滚轮820,所述前支撑轮组件900包括第二轮架910与设于第二轮架910上的前滚轮920;所述第一轮架810和第二轮架910与框架100转动连接,所述第一轮架810和第二轮架910可转动以
使后滚轮820和前滚轮920抬起离地,并通过固定件使第一轮架810和第二轮架910固定连接于所述框架100上。其中,所述固定件为插销件。
72.如图1-13所示,如此设置,后支撑轮组件800可通过第一轮架810转动以向上抬起,并通过固定件固定在框架100上,使得后滚轮820离地;同理,前支撑轮组件900可通过第二轮架910转动以向上抬起,并通过固定件固定在框架100上,使得前滚轮920离地;
73.牵引车10工作时,其附着在前起落架20上,将后支撑轮组件800和前支撑轮组件900收起,整体悬空不接触地面(即后滚轮820和前滚轮920离地),转弯时跟随起落架机轮22一起偏转;而牵引车10在脱离舰载机时需放下后支撑轮组件800和前支撑轮组件900,使后滚轮820和前滚轮920着地,由地勤人员推动进行转移。
74.优选地,所述框架100上设有把手110。设置的把手110用于地勤人员在牵引车10未连接舰载机起落架的状态下,用人力推动牵引车10进行转移。
75.综上,如图6-9所示,本实例中的牵引车10与舰载机前起落架20连接操作流程为:
76.1.地勤人员推动牵引车10至舰载机前起落架20一侧,将驱动盘300与舰载机前起落架20上的机轮22对准(对准机轮22轮毂中心向前推进直至驱动盘300定位中心与轮毂中心接触)固定连接;
77.2.驱动盘300上的套筒310与机轮22前轮毂的螺柱一一对位,手动将驱动盘300上的套筒310与舰载机的机轮22前轮毂的螺柱旋合连接,使得驱动盘300与机轮22固定连接;
78.3.将锁定件600的两个弧形件611合起(即将套环610合起),紧扣住前起落架20的减震支柱内筒21,插栓620插入弧形件611的插口612内以锁紧,使得框架100通过锁定件600与舰载机前起落架20固定连接;
79.4.抬起牵引车10的前支撑轮组件900和后支撑轮组件800并固定,将外接电源线500接入舰载机上的电力接口,即可开始随行驾驶或告知飞行员开始自主驾驶。同理,解除连接的操作为以上步骤的倒序。
80.优选地,所述框架100采用铝合金材质,采用砂型铸造配合机加工的成型工艺;采用上述设计以使框架100结构稳固且重量降低,如本实施例中其整体重量约为27kg。
81.本实施例中,所述电力驱动机构200采用额定功率30kw,峰值功率60kw,额定扭矩143n
·
m,峰值扭矩400n
·
m,重量68kg的电机。根据上述设计构思,本领域技术人员可对电力驱动机构200进行适用性选型,包括但不限于实施例方案。
82.综上所述,与现有技术相比,本发明提供的直接驱动前轮的舰载机用牵引车10,具有以下有益效果:
83.1.本发明提供的牵引车10使用电动驱动机构直接驱动舰载机前轮的动力传导方式:此方式结构更简单,自重更小轻,避免了无杆牵引车抱轮机构的结构复杂和成本高的缺点;
84.2.本发明提供的牵引车10由舰载机的apu提供电源,避免携带重量较大的电池,没有续航和更换电池的问题;
85.3.本发明提供的牵引车10与舰载机的对接程序简单(对接程序:电动驱动机构的驱动盘300与舰载机的机轮22直接固定连接,外接电源线500连接舰载机的电力接口,锁定件600固定连接舰载机前起落架20),且其结构简单,体积和重量均较小,其可在航母上大量装备,做到每一架舰上飞机的前轮都连接着一架牵引车10,飞机只要启动apu就能进行转
移,使用灵活,提高甲板调度的容错率;
86.4.牵引车10体积和重量都较小(本实施例提供的牵引车10的总重量为100kg,整体尺寸为1190mm*676mm*832mm),在其与舰载机脱离时,可以由单人推动进行转移。
87.5.可以由飞行员操控牵引车10向前自主滑行,机轮22转向由飞行员操纵,也能实现倒车进入停机位的运动;同时也允许由地面辅助人员进行遥控操作,兼容性好。
88.另外,本领域技术人员应当理解,尽管现有技术中存在许多问题,但是,本发明的每个实施例或技术方案可以仅在一个或几个方面进行改进,而不必同时解决现有技术中或者背景技术中列出的全部技术问题。本领域技术人员应当理解,对于一个权利要求中没有提到的内容不应当作为对于该权利要求的限制。
89.尽管本文中较多的使用了诸如驱动盘、电控器、框架、外接电源线等术语,但并不排除使用其它术语的可能性。使用这些术语仅仅是为了更方便地描述和解释本发明的本质;把它们解释成任何一种附加的限制都是与本发明精神相违背的;本发明实施例的说明书和权利要求书及上述附图中的术语“第一”、“第二”、等(如果存在)是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。
90.最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1