一种仿生王莲叶脉结构的足垫支撑
1.本发明涉及仿生结构工程技术领域,尤其是涉及一种仿生王莲叶脉结构的足垫支撑。
背景技术:
2.随着航天技术的发展,深空探索逐渐成为航天领域追求的热门方向。在深空探索过程中,探测器能否平稳着陆是保证后续探索顺利进行的前提,因此对航天着陆器力学性能的研究具有十分重要的意义。在着陆过程中,着陆器足垫是直接与地表接触的部件,其抗冲击性能直接影响了着陆器能否正常运行。但是,目前应用的着陆器足垫基本上都是厚重的金属圆盘形足垫,一方面其抗冲击性能较差,容易产生损坏;另一方面其重量过大,增加了航天器的能源消耗以及制作成本。因此,在保证足垫力学性能的前提下,完成对足垫的轻量化、高强化的设计具有重要的实际意义。
技术实现要素:
3.发明目的:为了克服背景技术的不足,本发明公开了一种仿生王莲叶脉结构的足垫支撑,通过仿生王莲叶结构实现良好的支撑、抗压性能,同时配合蜂窝结构实现减重,提高了性能的同时降低了生产过程中的成本。
4.技术方案:本发明所述的仿生王莲叶脉结构的足垫支撑,包括主体结构、加强结构及连接结构;所述主体结构为圆盘形球面结构,所述连接结构设于主体结构的内盘面中心处,所述加强结构为多根设于主体结构内盘面、由连接结构向圆盘外周径向放射状分布的加强筋。
5.进一步的,所述主体结构、加强结构与连接结构采用slm技术一体成型。
6.进一步的,所述主体结构表面为贯穿型蜂窝结构。
7.进一步的,所述加强筋周向均匀间隔分布,向外周径向放射时形成多级分支,同级分支之间成固定角度。
8.进一步的,所述加强筋经过放射后的每级分支的宽度为上级的一半。
9.进一步的,所述加强筋之间的夹角为45
°
或者60
°
,径向放射后的分支夹角为30
°
。
10.进一步的,所述连接结构为圆柱结构,起到与着陆器支架连接的作用。
11.进一步的,所述主体结构的球面弧度为10
°
。
12.有益效果:与现有技术相比,本发明的优点为:本发明中主体结构为足垫直接接触行星表面的构件,承担了抗压与抗冲击的功能,同时由于蜂窝结构的存在,使得应力与能量分布更加合理并有效地减轻了足垫重量;加强结构作为主要的承载构件,其特殊的结构有效的增强了足垫的承载能力,当足垫与地表接触时,加强结构为主体结构提供了较大的支撑力,辅助主体结构承受冲击载荷,同时,其各级分支可以有效地分散应力,缓解了应力集中,避免足垫结构产生较大的损伤,提高了着陆器着陆的稳定性。
附图说明
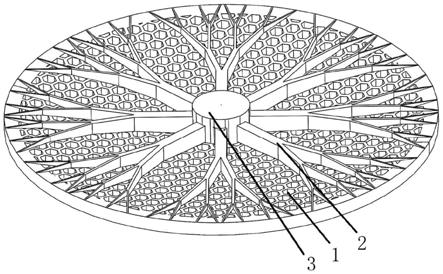
13.图1是本发明实施例1立体结构图;
14.图2是本发明实施例1侧视图;
15.图3是本发明实施例2立体结构图;
16.图4是本发明实施例3立体结构图;
17.图5是本发明实施例1足垫在20000n载荷下的应力分布图;
18.图6是本发明实施例1-3的断裂极限折线图。
具体实施方式
19.下面结合附图和实施例对本发明的技术方案作进一步的说明。
20.实施例1
21.如图1和图2所示,一种仿生王莲叶脉结构的足垫支撑,包括主体结构1、加强结构2及连接结构3,所述主体结构1、加强结构2与连接结构3采用slm技术一体成型。所述主体结构1为圆盘形球面结构,表面为贯穿型蜂窝结构,球面弧度为10
°
;所述连接结构3设于主体结构1的内盘面中心处,为圆柱结构;所述加强结构2为多根设于主体结构1内盘面、由连接结构3向圆盘外周径向放射状分布的加强筋,所述加强筋周向均匀间隔分布,向外周径向放射时形成多级分支,同级分支之间成固定角度。所述加强筋经过放射后的每级分支的宽度为上级的一半。
22.本实施例中,足垫(主体结构1)半径为75mm,厚度为5mm,蜂窝边长为2.5mm,表面与水平面夹角(球面弧度)为10
°
;加强结构主干(第一级加强筋)宽度为4mm,主干间夹角为45
°
,分支间夹角为30
°
,主干长20mm,一级分支长15mm,二级分支长15mm,三级分支与足垫圆周相交;连接结构半径为10mm,高度为15mm。
23.实施例2
24.如图3所示的仿生王莲叶脉结构的足垫支撑,与实施例1的区别仅在于加强结构主干间夹角为60
°
。
25.实施例3
26.如图4所示的仿生王莲叶脉结构的足垫支撑,与实施例2的区别仅在于加强结构主干(第一级加强筋)宽度为6mm。
27.实施例1-3中,主体结构是直接接触行星表面的构件,起支撑与保证着陆稳定的作用;加强结构是主要的承载构架,起提高足垫结构力学性能与整体稳定性的作用;连接结构起与着陆器支架连接的作用。
28.实施例1-3中的足垫支撑性能表征方法如下所示:
29.对足垫进行力学性能研究,通过实验获得slm成型铝合金的力学性能参数,如杨氏模量、拉伸强度、断裂伸长率等,并将这些参数输入有限元分析软件ansys中,然后导入模型、划分网格、添加边界及载荷条件,最后通过内置求解器求解结构的力学性能,如变形能力、应力分布、破坏承载力等。通过有限元分析手段对结构的力学性能进行分析,既可以较准确地预测结构的实际性能,还可以大大降低发明成本,提高发明效率。
30.实施例1的足垫在20000n载荷下的应力分布如图5所示,应力通过加强筋分支得到分散,整体应力分布均匀。
31.对实施例1-3的足垫进行断裂极限测试,如图6所示,减小加强筋角度,增加加强筋数量,可以提高承载力,增加加强筋的宽度对与承载力的提升更为明显。
技术特征:
1.一种仿生王莲叶脉结构的足垫支撑,其特征在于:包括主体结构(1)、加强结构(2)及连接结构(3);所述主体结构(1)为圆盘形球面结构,所述连接结构(3)设于主体结构(1)的内盘面中心处,所述加强结构(2)为多根设于主体结构(1)内盘面、由连接结构(3)向圆盘外周径向放射状分布的加强筋。2.根据权利要求1所述的仿生王莲叶脉结构的足垫支撑,其特征在于:所述主体结构(1)、加强结构(2)与连接结构(3)采用slm技术一体成型。3.根据权利要求1所述的仿生王莲叶脉结构的足垫支撑,其特征在于:所述主体结构(1)表面为贯穿型蜂窝结构。4.根据权利要求1所述的仿生王莲叶脉结构的足垫支撑,其特征在于:所述加强筋周向均匀间隔分布,向外周径向放射时形成多级分支,同级分支之间成固定角度。5.根据权利要求4所述的仿生王莲叶脉结构的足垫支撑,其特征在于:所述加强筋经过放射后的每级分支的宽度为上级的一半。6.根据权利要求4所述的仿生王莲叶脉结构的足垫支撑,其特征在于:所述加强筋之间的夹角为45
°
或者60
°
,径向放射后的分支夹角为30
°
。7.根据权利要求1所述的仿生王莲叶脉结构的足垫支撑,其特征在于:所述连接结构(3)为圆柱结构。8.根据权利要求1所述的仿生王莲叶脉结构的足垫支撑,其特征在于:所述主体结构(1)的球面弧度为10
°
。
技术总结
本发明公开了一种仿生王莲叶脉结构的足垫支撑,包括主体结构、加强结构及连接结构;所述主体结构为圆盘形球面结构,所述连接结构设于主体结构的内盘面中心处,所述加强结构为多根设于主体结构内盘面、由连接结构向圆盘外周径向放射状分布的加强筋。本发明通过仿生王莲叶结构实现良好的支撑、抗压性能,同时配合蜂窝结构实现减重,提高了性能的同时降低了生产过程中的成本。过程中的成本。过程中的成本。
技术研发人员:林开杰 王骞 宋玉越 贺俊健 李文祺 仇智超
受保护的技术使用者:南京航空航天大学
技术研发日:2022.06.13
技术公布日:2022/9/19
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1