一种火星无人飞行器
1.本发明涉及飞行器的技术领域,特别是涉及一种火星无人飞行器。
背景技术:
2.深空探测一直是人类对宇宙探测的热点。火星作为太阳系中和地球最相似的行星,且地球比较近,与地球同处于太阳系的“宜居带”中。近年来的研究表明,火星并非传统观点认为的那样贫瘠,其表面存在丰富的古代水活动历史和可能保存的古生命迹象,因此抓住有限的火星探测机会对火星进行全面系统的探测对于认识太阳系早期演化与生命起源具有重要意义。
3.不同于固定翼飞行器,直升机可实现在着陆区的垂直起飞,在空中某一高度的静止悬停。飞行不受着陆区场地的限制,拥有更宽的飞行包线。这些特点让它格外的适用于火星探测,在火星任务中,无人机可以携带小型载荷,并且进行采样和回收。随着材料技术的不断发展,众多的智能材料无疑能让更多的功能在火星无人飞行器上实现出来。
4.而目前成功在火星上完成试验飞行的飞行器只有采用共轴双旋翼的美国机智号,因此设计一种基于智能材料的新型火星无人飞行器对火星进行探测具有填补国内这一空白领域的重要意义。因此,亟需开发一种新型火星无人飞行器,以满足上述火星环境下的特定需求。
技术实现要素:
5.本发明的目的是提供一种火星无人飞行器,以解决上述现有技术存在的问题,使机翼展开机构可更加快速、便捷、准确地将机构定位到所需位置,提高了飞行器对环境的适应性与操作的可靠性。
6.为实现上述目的,本发明提供了如下方案:
7.本发明提供了一种火星无人飞行器,包括主机箱、机翼、螺旋桨和太阳能帆板,所述主机箱通过机翼展开机构连接有所述机翼,所述机翼为三个且均布于所述主机箱的周围,所述机翼的远端上设置有所述螺旋桨,所述主机箱的顶部中心设置有所述太阳能帆板,所述太阳能帆板能够为所述主机箱供电,所述主机箱内设置有电控系统,所述螺旋桨和所述机翼展开机构均与所述电控系统电连接,所述机翼展开机构采用sma材质的动力驱动。
8.优选的,所述机翼的根部设置有翼根减振机构,所述翼根减振机构包括若干个mfc贴片,所述机翼的两侧均粘贴有若干个所述mfc贴片,每个所述mfc贴片分别与所述电控系统电连接。
9.优选的,所述机翼包括主翼和副翼,所述主翼和所述副翼铰接,所述主翼和所述副翼的铰接端通过机翼偏转机构连接。
10.优选的,所述机翼偏转机构包括若干个mfc贴片,所述主翼和所述副翼的铰接端两侧均设置有若干个用于容纳所述mfc贴片的凹槽,所述mfc贴片的两端分别粘贴于所述主翼和所述副翼上,每个所述mfc贴片分别与所述电控系统电连接。
11.优选的,所述机翼的末端设置有翼梢小翼,所述翼梢小翼的内部嵌设有sma丝网。
12.优选的,所述机翼展开机构包括支撑架、滑块、限位连接板和平移机构,所述主机箱上开设在有三个u形槽,所述支撑架对称设置于所述u形槽的两侧,所述支撑架的中部设置有腰型滑槽、外端分别与一所述限位连接板的一端铰接,所述限位连接板的另一端与所述滑块的下端铰接,所述滑块上端的两端滑动设置于所述腰型滑槽内,所述滑块的上端与所述平移机构连接、下端通过一连杆与所述机翼连接。
13.优选的,所述平移机构为sma弹簧,所述sma弹簧的一端固定于l型的固定杆上、另一端固定于所述滑块上,所述sma弹簧与所述电控系统电连接。
14.优选的,所述滑块包括中心滑块和端部滑块,所述限位连接板和所述机翼均与所述中心滑块连接,所述中心滑块的两端分别通过一滑杆与所述端部滑块转动连接,所述滑杆穿设于所述腰型滑槽内,所述端部滑块的两端分别连接一平移机构。
15.优选的,两个所述支撑架的外端固定连接有一限位罩,所述限位罩能够限制所述中心滑块处于水平位置后向外移动。
16.本发明相对于现有技术取得了以下技术效果:
17.本发明的火星无人飞行器,运用了sma智能材料做作驱动器,实现了构型方面的创新,使机翼展开机构可更加快速、便捷、准确地将机构定位到所需位置,使飞行器可随环境变化而智能的做出相应改变,提高了飞行器对环境的适应性与操作的可靠性。
附图说明
18.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
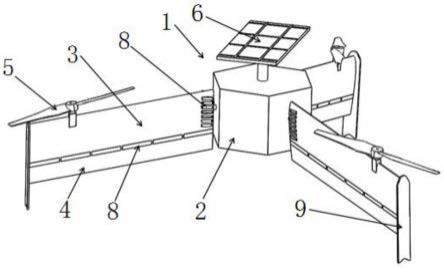
19.图1为本发明火星无人飞行器的结构示意图一;
20.图2为本发明火星无人飞行器的结构示意图二;
21.图3为本发明火星无人飞行器的结构示意图三;
22.图4为本发明火星无人飞行器中机翼展开机构的结构示意图;
23.图5为本发明火星无人飞行器中固定杆的结构示意图;
24.图6为本发明火星无人飞行器中限位连接板的结构示意图;
25.图7为本发明火星无人飞行器中心滑块的结构示意图;
26.图8为本发明火星无人飞行器中sma丝网的结构示意图;
27.图9为本发明火星无人飞行器中机翼的结构示意图;
28.其中:1-火星无人飞行器,2-主机箱,3-主翼,4-副翼,5-螺旋桨,6-太阳能帆板,7-凹槽,8-mfc贴片,9-翼梢小翼,10-sma丝网,11-支撑架,12-腰型滑槽,13-限位连接板,14-中心滑块,15-端部滑块,16-限位罩,17-滑杆,18-sma弹簧,19-固定杆,20-连杆。
具体实施方式
29.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于
本发明中的实施例,本领域普通技术人员在没有付出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
30.本发明的目的是提供一种火星无人飞行器,以解决现有技术存在的问题,使机翼展开机构可更加快速、便捷、准确地将机构定位到所需位置,提高了飞行器对环境的适应性与操作的可靠性。
31.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
32.如图1至图9所示:本实施例提供了一种火星无人飞行器1,包括主机箱2、机翼、螺旋桨5和太阳能帆板6,主机箱2通过机翼展开机构连接有机翼,机翼为三个且均布于主机箱2的周围,机翼的远端上设置有螺旋桨5,主机箱2的顶部中心设置有太阳能帆板6,太阳能帆板6能够为主机箱2和用电设备供电,主机箱2内设置有电控系统,螺旋桨5和机翼展开机构均与电控系统电连接,机翼展开机构采用sma材质的动力驱动,运用了sma智能材料做作驱动器,提高了飞行器对环境的适应性与操作的稳定性。其中,主机箱2、机翼、螺旋桨5均采用铝合金材质。螺旋桨5符合气动外形要求,是火星无人飞行器1的飞行动力来源;机翼是带有一定的后掠角度的平直翼,翼型为对称翼型,主机箱2呈六棱柱状。
33.机翼的根部设置有翼根减振机构,翼根减振机构包括若干个mfc贴片8,机翼的两侧均粘贴有若干个mfc贴片8,每个mfc贴片8分别与电控系统电连接。当机翼发生振动时,翼根减震的mfc贴片8可作为振动传感器,将这种振动转化为电信号传递给电控系统,电控系统接受其信息并处理,可发出指令单独控制每片mfc贴片8的接入电流,让翼根处合适位置的mfc贴片8反向弯曲,进而减弱机翼的这种振动,使飞行稳定。
34.机翼包括主翼3和副翼4,主翼3和副翼4铰接,主翼3和副翼4的铰接端通过机翼偏转机构连接。机翼偏转机构包括若干个mfc贴片8,主翼3和副翼4的铰接端两侧均设置有若干个用于容纳mfc贴片8的凹槽7,mfc贴片8的两端分别粘贴于主翼3和副翼4上,每个mfc贴片8分别与电控系统电连接,能够被独立控制发生形变。当机翼发生振动时,mfc贴片8可作为振动传感器,将这种振动转化为电信号传递给电控系统,并控制通过对不同mfc贴片8的通入不同的电能,使分布在机翼两侧的mfc贴片8一侧伸长、一侧收缩,进而让副翼4完成绕铰接轴适应性偏转的操作。
35.机翼的末端设置有翼梢小翼9,翼梢小翼9的内部嵌设有sma丝网10。翼梢小翼9用于近地侧在飞行器停放于火星表面时与地面接触,而在螺旋桨5高速旋转飞行的过程中,由于旋转过程气动热使得翼梢的温度升高,这部分热量会诱导sma丝网10的形状记忆效应,使马氏体转变为强度更高的奥氏体,可提高翼梢的强度。
36.机翼展开机构包括支撑架11、滑块、限位连接板13和平移机构,主机箱2上开设在有三个u形槽,可用于收纳机翼,支撑架11对称设置(通过卡槽卡接)于u形槽的两侧,支撑架11的中部设置有腰型滑槽12、外端分别与一限位连接板13的一端铰接,限位连接板13的另一端与滑块的下端铰接,滑块上端的两端滑动设置于腰型滑槽12内,滑块的上端与平移机构连接、下端通过一连杆20与机翼转动连接。
37.平移机构为sma弹簧18,sma弹簧18的一端固定于l型的固定杆19上、另一端固定于滑块上,固定杆19固定于主机箱2上方的平台上,sma弹簧18与电控系统电连接。电控系统可通过对sma弹簧18进行电加热,使sma弹簧18收缩,带动机翼展开机构运动,进一步带动机翼
转动、最终完全展开。滑块包括中心滑块14和端部滑块15,限位连接板13和机翼均与中心滑块14的下端连接,中心滑块14的两端分别通过一滑杆17与端部滑块15转动连接,滑杆17穿设于腰型滑槽12内,端部滑块15的两端分别连接一平移机构,使运行更加平稳。两个支撑架11的外端固定连接有一限位罩16,限位罩16能够限制中心滑块14处于水平位置后向外移动,保持机翼展开后的机构稳定。
38.本实施例的火星无人飞行器1,如附图1所示在起降阶段,机翼的弦线方向与主机箱2的中轴线平行,飞行器依靠三组螺旋桨5提供的拉力实现垂直起降功能,此时,飞行器可通过三组螺旋桨5的不同转速、带有sma材质的机翼展开机构调整机翼的迎角与mfc贴片8调整副翼4的舵偏实现飞行姿态的控制。如附图2所示,在飞行器的巡航阶段,机翼的弦线方向与主机箱2的中轴线近似垂直,飞行器依靠螺旋桨5提供的拉力带动机翼进行高速旋转,机翼在旋转中提供升力,此时,飞行器通过机翼展开机构来调整机翼的迎角与翼根减振机构调整机翼的舵偏,从而实现飞行器的姿态控制。本实施例实现了构型方面的创新,且运用了sma与mfc智能材料做作驱动器或传感器,使机翼展开机构可更加快速、便捷、准确地将机构定位到所需位置,使机翼翼面控制、机翼减振等功能可随环境变化而智能的做出相应改变,提高了飞行器对环境的适应性与操作的可靠性。
39.本说明书中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1