一种无人机搭载浮游生物网的采样装置的制作方法
1.本发明涉及浮游生物采样的技术领域,具体涉及一种无人机搭载浮游生物网的采样装置。
背景技术:
2.浮游生物作为生物监测的一个重要监测指标,同时,浮游生物作为生物监测、评价水质污染和营养水平的重要指标,国内外已广泛采用并卓有成效,其包括浮游植物和浮游动物,浮游生物网是采集浮游生物样品的主要工具之一,采样方式为人工采样,采样过程需要耗费大量的人力物力,而且人为采样过程中,容易影响采样环境,造成采样检测的结果不准确,同时存在人员无法到达,采样位置受限的情况。
技术实现要素:
3.基于上述表述,本发明提供了一种无人机搭载浮游生物网的采样装置,通过无人机搭载采样机构对浮游生物进行采样,能够减少采样过程中人对周边环境的影响,避免采样位置受限的发生。
4.本发明解决上述技术问题的技术方案如下:一种无人机搭载浮游生物网的采样装置,包括无人机、移动机构和采样机构;所述移动机构可拆卸地安装在所述无人机的底部,所述采样机构可拆卸地安装在所述移动机构的底部;所述移动机构用于驱动所述采样机构水平地呈“∞”字形移动,使所述采样机构完成对浮游生物的采样。
5.在上述技术方案的基础上,本发明还可以做如下改进。
6.进一步的,所述移动机构包括底板,所述底板的顶部设置有用于连接所述无人机的第一连接部;所述底板下方安装有两个转盘及驱动两个所述转盘反向转动的驱动件,围绕两个所述转盘的外侧均设置有“∞”字形导轨;所述“∞”字形导轨内设置有长条状的换轨滑块,两个所述转盘上均设置有若干拨叉板,所述拨叉板用于驱动所述换轨滑块在所述“∞”字形导轨中呈“∞”字形移动;所述换轨滑块的底部设置有连接座,所述连接座的顶部设置有竖直的连接杆,所述连接杆的底部设置有用于连接所述采样机构的第二连接部。
7.进一步的,所述连接座的顶部设置有两个所述换轨滑块。
8.进一步的,所述驱动件包括设置在所述底板顶部的双头电机和两个从动齿轮,两个从动齿轮分别与两个所述转盘同轴连接;所述双头电机的两个输出轴分别通过轴联器连接有驱动齿轮,两个所述驱动齿轮分别与两个所述从动齿轮啮合。
9.进一步的,所述第二连接部为三通连接头,三头均为螺纹旋转连接口,并且均设置有锁紧螺栓。
10.进一步的,所述连接杆上设置有振动电机。
11.进一步的,所述采样机构包括两个浮游生物网,分别用于采样浮游植物和浮游动物;两个所述浮游生物网对称地设置在所述采样机构移动路径的两侧,并且两个所述浮游生物网的网口均垂直于水面并始终朝向所述采样机构移动方向的前方。
12.进一步的,其中一个所述浮游生物网为25号浮游生物网,用于采样浮游植物;另一个所述浮游生物网为13号浮游生物网,用于采样浮游动物。
13.进一步的,所述无人机的底部设置有测距仪。
14.进一步的,所述无人机的底部设置有云台相机,顶部设置有gps天线。
15.与现有技术相比,本技术的技术方案具有以下有益技术效果:
16.1、本发明通过无人机搭载采样机构对浮游生物进行采样,能够减少采样过程中人对周边环境的影响,避免采样位置受限的发生;
17.2、通过移动机构驱动采样机构呈“∞”字形移动,在按照规范采样浮游生物时,也能保证无人机稳定停留在特定地点,实现样品的定点采集,保证采样点位的准确性。
附图说明
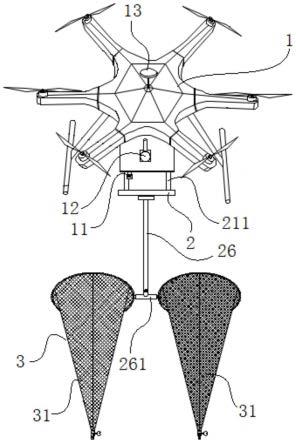
18.图1为本发明实施例提供的一种无人机搭载浮游生物网的采样装置的结构示意图;
19.图2为本发明实施例中采样机构的结构示意图;
20.图3为本发明实施例中第二连接部的结构示意图;
21.图4为本发明实施例中安装座顶部的结构示意图;
22.图5为本发明实施例中导轨机构底部的结构示意图;
23.图6为本发明实施例中滑轨滑块换轨时的状态示意图;
24.图7为本发明实施例中导轨机构顶部的结构示意图;
25.附图中,各标号所代表的部件列表如下:
26.1、无人机;11、测距仪;12、云台相机;13、gps天线;2、移动机构; 21、底板;211、第一连接部;22、转盘;221、拨叉板;23、“∞”字形导轨; 24、换轨滑块;25、连接座;26、连接杆;261、第二连接部;262、螺纹旋转连接口;263、锁紧螺栓;264、振动电机;27、驱动件;271、双头电机; 272、轴联器;273、驱动齿轮;274、从动齿轮;3、采样机构;31、浮游生物网;311、网圈;312、网衣;313、网底管;314、阀门。
具体实施方式
27.为了便于理解本技术,下面将参照相关附图对本技术进行更全面的描述。附图中给出了本技术的实施例。但是,本技术可以以许多不同的形式来实现,并不限于本文所描述的实施例。相反地,提供这些实施例的目的是使本技术的公开内容更加透彻全面。
28.除非另有定义,本文所使用的所有的技术和科学术语与属于本技术的技术领域的技术人员通常理解的含义相同。本文中在本技术的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本技术。
29.在此使用时,单数形式的“一”、“一个”和“所述/该”也可以包括复数形式,除非上下文清楚指出另外的方式。还应当理解的是,术语“包括/ 包含”或“具有”等指定所陈述的特征、整体、步骤、操作、组件、部分或它们的组合的存在,但是不排除存在或添加一个或更多个其他特征、整体、步骤、操作、组件、部分或它们的组合的可能性。
30.一种无人机搭载浮游生物网的采样装置,包括无人机1、安装在无人机 1下方的移动机构2以及安装在移动机构2下方的采样机构3。移动机构2 用于驱动采样机构3水平地呈“∞”字形移动,使采样机构3按照规范的路径完成对浮游生物的采样。
31.另外,无人机1的顶部安装有gps天线13,用于对无人机1进行定位。无人机1的底部安装有云台相机12,用于观察无人机1飞行过程中的周边的环境。无人机1的底部还安装有测距仪11,用于测量无人机1至水面的距离,保证无人机1的飞行高度稳定,同时还能通过计算算出采样机构3伸入水中的深度。
32.本实施例中,移动机构2包括底板21、在底板21下端呈“∞”字形移动的连接座25和安装在底板21上端用于驱动连接座25移动的驱动件27。底板21的顶部设置有与无人机1可拆卸连接的第一连接部211,连接座25的底部固定有竖直的连接杆26,连接杆26的底部设置有与采样机构3可拆卸诶连接的第二连接部261。
33.具体的,底板21的底部可转动地安装有两个转盘22。围绕两个转盘22 的外侧设置有“∞”字形导轨23,连接座25的顶部可转动地安装有两个换轨滑块24,两个换轨滑块24均可滑动地安装在“∞”字形导轨23内,并且两个转盘22上均设置有若干与换轨滑块24相匹配的拨叉板221,两个转盘22 以相反的方向转动,从而通过拨叉板221驱动两个换轨滑块24在“∞”字形导轨23内呈“∞”字形移动,并使连接座25、连接杆26和采样机构3随两个换轨滑块24一同呈“∞”字形移动。
34.驱动件27用于驱动两个转盘22反向转动。本实施例中,驱动件27包括安装在底板21顶部的双头电机271和两个从动齿轮274。两个从动齿轮 274分别与两个转盘22同轴固定连接。双头电机271的两个输出轴分别通过轴联器272连接有驱动齿轮273,两个驱动齿轮273分别与两个从动齿轮274 啮合。双头电机271同时通过两端的轴联器272和驱动齿轮273驱动两侧的从动齿轮274反向转动,从而驱动底板21底部的两个转盘22反向转动。
35.另外,本实施例中,采样机构3包括两个浮游生物网31,其中一个浮游生物网31为25号浮游生物网,网孔直径为0.064mm,用于采样浮游植物;另一个浮游生物网31为13号浮游生物网,网孔直径为0.112mm,用于采样浮游动物。
36.第二连接部261为三通连接头,三头均为螺纹旋转连接口262,并且均设置有锁紧螺栓263。其中一个头连接连接杆26,两个浮游生物网31分别安装在第二连接部261的另两个头上,使两个浮游生物网31对称地设置在采样机构3移动路径的两侧。
37.每个浮游生物网31均包括网圈311和网衣312。网圈311用于可拆卸地连接第二连接部261,并且网圈311形成浮游生物网31的网口,垂直于水面,网衣312固定在网圈311移动方向的后侧,使浮游生物网31的网口始终朝向移动方向的前侧。网衣312的底部设置有网底313,网底管313上设置有阀门314。
38.连接杆26上还设置有用于振动浮游生物网31的振动电机264。
39.使用本实施例的采样装置对浮游生物采样的过程如下:
40.(1)技术人员经现场踏勘后,确定起飞、降落点,规划航行路线后,将连接杆26和两个浮游生物网31通过第二连接部261连接,并拧紧锁紧螺栓263。
41.(2)通过地面控制基站控制无人机1飞行,并通过云台相机12观察无人机1的周边环境,在无明显水流处,控制无人机1缓慢下降,使两个浮游生物网31浸没在水中,开启振动电机264,通过振动浮游生物网31对浮游生物网31荡涤清洗。
42.(3)控制无人机1缓慢上升,通过gps天线13定位无人机1,并使无人机1移动至采样的指定点位。
43.(4)控制无人机1缓慢下降,通过测距仪11测定无人机1到达水面的距离,由此通过计算得出采样深度,到达指定采样深度时,通过移动机构2 控制两个浮游生物网31在水中呈“∞”字形缓慢移动,3分钟后,样品采集完毕,无人机1返航。
44.(5)多次反复冲洗两个浮游生物网31,将样品分别装入样品瓶中,依次卸下浮游生物网31和连接杆26。
45.本实施例通过无人机搭载采样机构对浮游生物进行采样,能够减少采样过程中人对周边环境的影响,避免采样位置受限的发生。另外,通过移动机构2驱动采样机构3呈“∞”字形移动,在按照规范通过“∞”字形轨迹采样浮游生物时,也能保证无人机稳定停留在指定电位,实现样品的定点采集,保证采样点位的准确性。
46.以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1