用于飞行器的单自由度机翼姿态变换并联机构
1.本发明属于机翼姿态变换机构技术领域,特别涉及一种用于飞行器的单自由度机翼姿态变换并联机构。
背景技术:
2.自飞行器诞生以来,设计师一直在尝试各种方法来改善飞行器的性能。传统飞行器专为特定的飞行条件和飞行环境而设计,并且功能单一,无法实现不同飞行模式的自由切换。现代飞行器需要执行军事侦察、大机动作战、远程运输、灾害救援等多种任务。需要其拥有更全面,更广泛的功能,并且能适应各种复杂的飞行环境。中国专利cn104743112a公开了一种新型倾转翼飞机,该发明的机翼姿态变换机构是将机翼靠外部分设置为可以绕机翼的梁方向旋转,在需要进行飞行状态切换时,只需要旋转外侧可动部分机翼就可以改变螺旋桨的方向。但是其不能很好的降低飞机在垂直飞行状态或者水平飞行状态下的飞行阻力。中国专利cn105173075a公开了一种可倾转翼飞机,可以实现垂直飞行状态以及水平飞行状态之间的转换,但是该发明采用的机翼姿态变换机构驱动数目较多,完成机翼姿态变换需要六个电机驱动,控制复杂,同时产生很大的飞行重量损失。
3.因此,本发明提出一种新的单自由度机翼姿态变换并联机构,用于飞行器在垂直飞行状态和水平飞行状态之间飞行状态的任意切换。
技术实现要素:
4.针对现有技术存在的问题,本发明提供一种用于飞行器的单自由度机翼姿态变换并联机构,可以使飞行器在垂直飞行状态和水平飞行状态之间任意切换,使飞行器既拥有垂直飞行状态的悬停和垂直起降功能,又具备水平飞行状态的飞行速度快,运载能力大的优势,具有控制简单,且变换可靠性高等优点。
5.本发明采用的技术方案是一种用于飞行器的单自由度机翼姿态变换并联机构,其包括机身、约束支链、驱动支链以及机翼,所述约束支链以及驱动支链对称设于所述机身的两侧,且所述约束支链以及驱动支链均位于所述机身和机翼之间,所述约束支链通过第一虎克铰连接所述机身和机翼,且所述第一虎克铰中的第一转动副与所述机身连接,所述第一虎克铰中的第二转动副与所述机翼连接,且所述第一虎克铰中第一转动副的中心轴线平行于所述机身的竖直棱边,所述第一虎克铰中第二转动副的中心轴线平行于所述机翼的水平棱边,所述驱动支链包括第一连杆、第二连杆和驱动部件,且所述第一连杆的第一端通过第三转动副与所述机身连接,所述第一连杆的第二端通过第一移动副与所述第二连杆的第一端连接,所述第一移动副轴线垂直于所述第三转动副的中心轴线,且所述驱动部件设于所述第一移动副处,所述第二连杆的第二端通过球铰与所述机翼连接。
6.优选地,当所述驱动支链向外伸出时,所述机翼绕所述第一转动副以及第二转动副的中心轴线转动,且所述机翼能动作并逐渐由竖直状态展开至水平状态;当所述驱动支链向内缩回时,所述机翼绕所述第一转动副以及第二转动副的中心轴线转动,且所述机翼
能动作并逐渐由水平状态收拢至竖直状态。
7.本发明的特点和有益效果是:
8.1、本发明提供的一种用于飞行器的单自由度机翼姿态变换并联机构,通过在机身与机翼之间设置约束支链以及驱动支链可以实现机翼在水平位置和竖直位置之间自由切换,继而实现飞行器水平飞行状态和垂直飞行状态之间的自由切换,使飞行器既拥有垂直飞行状态的悬停和垂直起降功能,又具备水平飞行状态的飞行速度快,运载能力大的优势。
9.2、本发明提供的一种用于飞行器的单自由度机翼姿态变换并联机构,机翼从水平状态到垂直状态的姿态变换,不仅要绕约束支链中第一转动副转动,而且绕机翼自身平面轴线转动,即第二转动副转动。
10.3、本发明提供的一种用于飞行器的单自由度机翼姿态变换并联机构,两种飞行模式可以共用一套动力装置,在一定程度上减轻了飞行器的质量,使其具备更大的承载能力,具有控制简单,且变换可靠性高等优点。
附图说明
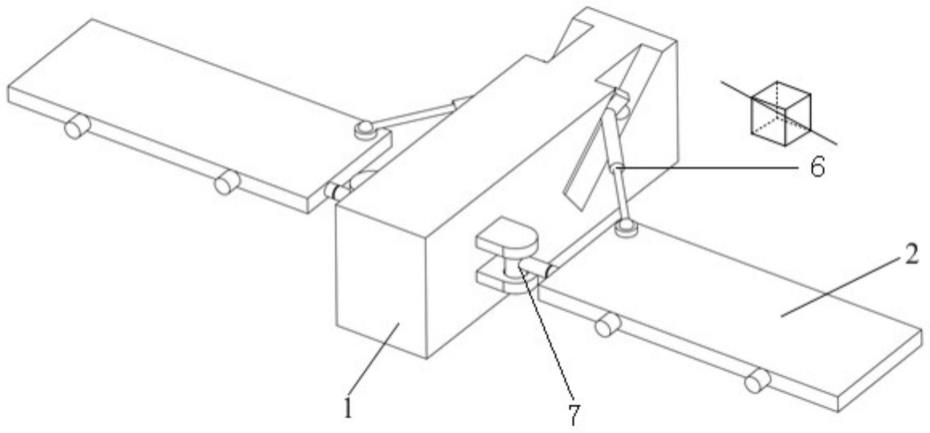
11.图1是本发明用于飞行器的单自由度机翼姿态变换并联机构的整体结构示意图;
12.图2是本发明的机翼处于水平飞行状态图;
13.图3是本发明的机翼处于竖直飞行状态图;
14.图4是本发明的机构简图;
15.图5是本发明的工作空间示意图;
16.图6是本发明的第一转动副转角和第二转动副转角耦合关系示意图;
17.图7是本发明的反解杆长示意图;
18.图8是本发明机翼质心的位置曲线图;
19.图9是本发明机翼质心的速度曲线图。
20.主要附图标记:
21.机身1;机翼2;第一连杆3;第二连杆4;驱动部件5;驱动支链6;约束支链7;第一转动副r1;第二转动副r2;第三转动副r3;第四转动副r4;第一移动副p1;球铰s;机翼水平棱边a;机身竖直棱边b;机身的平面c;机身水平棱边d;机身水平棱边e。
具体实施方式
22.为详尽本发明之技术内容、结构特征、所达成目的及功效,以下将结合说明书附图进行详细说明。
23.本发明提供一种用于飞行器的单自由度机翼姿态变换并联机构,如图1~图3所示,其包括机身1、约束支链7、驱动支链6以及机翼2,约束支链7以及驱动支链6对称设于机身1的两侧,且约束支链7以及驱动支链6均位于机身1和机翼2之间,约束支链7通过第一虎克铰连接机身1和机翼2,且第一虎克铰中的第一转动副r1与机身1连接,第一虎克铰中的第二转动副r2与机翼2连接,且第一虎克铰中第一转动副r1的中心轴线平行于机身1的机身竖直棱边b,第一虎克铰中第二转动副r2的中心轴线平行于机翼2的机翼水平棱边a,驱动支链6包括第一连杆3、第二连杆4和驱动部件5,且第一连杆3的第一端通过第三转动副r3与机身1连接,第一连杆3的第二端通过第一移动副p1与第二连杆4的第一端连接,第一移动副p1轴
线垂直于第三转动副r3的中心轴线,且驱动部件5设于第一移动副p1处,第二连杆4的第二端通过球铰s与机翼2连接。
24.优选地,机翼2的前端设有桨叶,且桨叶通过第四转动副r4与机翼2连接,且第四转动副r4的中心轴线与第二转动副r2的中心轴线垂直。
25.在一种优选方式中,当驱动支链6向外伸出时,机翼2绕第一转动副r1以及第二转动副r2的中心轴线转动,且机翼2能动作并逐渐由竖直状态展开至水平状态;当驱动支链6向内缩回时,机翼2绕第一转动副r1以及第二转动副r2的中心轴线转动,且机翼2能动作并逐渐由水平状态收拢至竖直状态。
26.如图4所示,为获得单自由度机翼姿态变换并联机构的工作空间以及运动过程中驱动支链6的杆长信息。首先建立定坐标系在约束支链7中的第一虎克铰的中心处,建立动坐标系也在虎克铰中心处,x,y,z方向与定坐标系保持一致。其中第三转动副r3的中心在定坐标系中的坐标为(100,-650,-150),且第三转动副r3的中心轴线方向向量为(1,1,-1),第三转动副r3的中心轴线与第一移动副p1轴线之间的夹角为54.74度,第三转动副r3在机身的平面c上的投影与机身水平棱边d和机身水平棱边e之间的夹角均为45度。
27.如图5所示,由修正的g-k公式可以计算得到单自由度机翼姿态变换并联机构的自由度为1,约束支链7中的第一虎克铰提供2个转动自由度,从而提供3个约束力和1个约束力偶。驱动支链6提供一个约束力,机构最终一共有一个自由度。利用蒙特卡洛法绘制机构的工作空间,由于驱动分支上的球副只能在其分支所在的平面内运动,并且球副的位置工作空间还满足约束分支虎克铰的工作空间,因此绘制出两个分支各自的工作空间图,然后找到两个曲面的交线就是该机构的工作曲线。对于模式切换机构需要两个自由度才能实现指定的运动,但是驱动支链6为rps分支,由于rps分支的引入使得两个分支运动链之间相互影响,使得实现目标运动只需要一个驱动便可以完成精确的控制。因此两个分支的工作空间存在共同的坐标点,两个曲面的交线是机翼上一点的坐标轨迹,也就是机翼的运动轨迹曲线。
28.进一步通过驱动支链6和约束支链7之间的关系建立方程求解第一转动副r1的转角和第二转动副r2的转角两个转角之间的关系,由于rps分支上点只能在rps所在的平面内运动,因此满足r副的方向矢量与p副的方向矢量垂直,利用点积为0建立等式。利用matlab得到两个转角之间的关系,如图6所示。
29.如图6所示,第一转动副r1的转角和第二转动副r2的转角之前存在耦合关系,根据matlab求解可知耦合关系,与adams仿真结果一致。利用两个转角之间的关系求解出杆长便可以得到机构的反解,并由adams与matlab联合仿真验证,二者结果相吻合,如图7所示。
30.本发明的具体操作步骤如下:如图1~图5所示,本发明的一种单自由度机翼姿态变换并联机构,其包括机身1、约束支链7、驱动支链6以及机翼2,约束支链7以及驱动支链6对称设于机身1的两侧,且约束支链7以及驱动支链6均位于机身1和机翼2之间,约束支链7通过第一虎克铰连接机身1和机翼2,驱动支链6包括第一连杆3、第二连杆4和驱动部件5,且第一连杆3的第一端与机身1转动连接,第一连杆3的第二端与第二连杆4的第一端滑动连接,且驱动部件5设于第一移动副p1处,第二连杆4的第二端与机翼2球副连接。
31.在具体使用过程中,当驱动支链6中的驱动部件5驱动第二连杆4相对于第一连杆3向内收回119.1601mm,然后再向外伸出150.0494mm,机翼2绕约束支链7的第一转动副r1和
第二转动副r2分别转动90度。此时机翼从图1中的水平位置运动到图3中的垂直位置。通过仿真得到了机翼质心位置坐标分量和质心位置速度分量,曲线平滑且连续,没有发生速度突变,如图8和图9所示。本发明提供了一种实现飞行器水平飞行状态和垂直飞行状态自由切换的单自由度机翼姿态变换并联机构。该机构使得机翼在水平位置和竖直位置之间自由切换,且桨叶轴线的方向同时在水平方向和竖直方向之间自由切换。该机构完成从水平状态到垂直状态的姿态变换,完成这个姿态变换不仅要绕垂直轴转动,而且绕机翼自身平面轴线转动,此外两种飞行模式可以共用一套动力装置,在一定程度上减轻了飞行器的质量,使其具备更大的承载能力,具有控制简单,且变换可靠性高等优点。
32.以上所述的实施例仅是对本发明的优选实施方式进行描述,并非对本发明的范围进行限定,在不脱离本发明设计精神的前提下,本领域普通技术人员对本发明的技术方案做出的各种变形和改进,均应落入本发明权利要求书确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1