一种无人机环境保护用生态遥感监测设备的制作方法
1.本发明涉及环境保护生态监测技术领域,尤其涉及一种无人机环境保护用生态遥感监测设备。
背景技术:
2.环境保护一般是指人类为解决现实或潜在的环境问题,协调人类与环境的关系,保护人类的生存环境、保障经济社会的可持续发展而采取的各种行动的总称。其方法和手段有工程技术的、行政管理的,也有经济的、宣传教育的等。
3.遥感监测技术是通过航空或卫星等收集环境的电磁波信息对远离的环境目标进行监测识别环境质量状况的技术,它是一种先进的环境信息获取技术,在获取大面积同步和动态环境信息方面“快”而“全”,是其他检测手段无法比拟和完成的。因此,得到日益广泛的应用,如大气、水质遥感监测,海洋油污染事故调查,城市热环境及水域热污染调查,城市绿地、景观和环境背景调查,生态环境调查监测等。
4.针对目前对环境保护要求,需要无人机携带生态遥感监测设备根据提前编辑好的航空路线在高空进行对环境的监测工作。
5.然而目前无人机环境保护用的生态遥感监测设备,在使用时不具备自我防护功能,无人机在工作过程出现失控,无人机的螺旋桨停止旋转,无人机会由空中直接跌落,而用于生态遥感监测的设备也会随着无人机的掉落而掉落,无人机和生态遥感掉落至地面后,无人机因由铁或其他钢材料支撑,高空掉落后,不会出现过度的损毁情况,而监测设备坠落,其内部用于监测的带有玻璃或直接和外壳连接的结构会直接被振毁,从而导致监测设备无法再次进行使用,造成成本的浪费。
6.为了解决本领域普遍存在生态遥感监测设备在使用时不具备自我防护功能问题,作出了本发明。
技术实现要素:
7.本发明的目的在于,针对目前生态遥感监测设备所存在的不足,提出了一种无人机环境保护用生态遥感监测设备。
8.为了克服现有技术的不足,本发明采用如下技术方案:
9.一种无人机环境保护用生态遥感监测设备,包括安装座、防护壳、延伸机构、遥感监测设备本体、振动传感器、防护机构、旋转机构和密封机构,所述安装座被配置为与无人机进行固定安装,所述防护壳被配置为对其内部结构进行防护,所述延伸机构被配置为带动遥感监测设备本体进行升降,所述遥感监测设备本体被配置为对生态环境进行遥感监测,所述振动传感器被配置为对无人机的螺旋桨产生的振动进行监测,所述防护机构被配置为对防护壳的底部进行保护,所述旋转机构被配置为带动防护壳进行旋转,所述密封机构被配置为对防护壳的底部进行密封,所述延伸机构、遥感监测设备本体和振动传感器均安装于防护壳的内部,所述密封机构位于防护机构的顶部。
10.可选的,所述延伸机构包括延伸气缸和固定板,所述延伸气缸的顶端与防护壳内腔的顶部栓接,所述延伸气缸的底端与固定板的顶部栓接,所述固定板的底部与遥感监测设备本体的顶部栓接。
11.可选的,所述防护机构包括防护板和连接杆,所述防护板的顶部与防护壳的底部接触,所述防护板的顶部与连接杆的底端栓接,所述连接杆位于防护壳的内部,所述连接杆靠近固定板的一侧与固定板栓接。
12.可选的,所述旋转机构包括驱动马达、齿轮一、齿轮二、轴承一和转动杆,所述旋转机构安装于安装座的内部,所述驱动马达的输出端贯穿至安装座的底部并与齿轮一的内部固定套接,所述齿轮一的表面与齿轮二的表面啮合,所述齿轮二的内部与转动杆的表面固定套接,所述转动杆的底端与防护壳的顶部栓接,所述轴承一的表面与安装座的内部固定套接,所述轴承一的内部与转动杆的表面转动套接。
13.可选的,所述轴承一,包括轴承外圈、滚动体、轴承内圈,所述轴承外圈的内滚道面包括三个向所述轴承外圈的内侧突出的凸起部,所述三个凸起部依次连接,在相邻两个所述凸起部的连接处形成凹部;所述凸起部和所述凹部均为弧线,所述三个凸起部沿所述轴承外圈安装座的周向均匀分布在所述内滚道面上;所述内滚道面的截面轮廓满足以下公式:r+0.052cos3θ;其中,r为所述轴承外圈安装座的内滚道的设计半径,θ为所述设计半径r所对应的起始角度。
14.可选的,所述密封机构包括密封垫和密封槽,所述密封垫的底部与防护板的顶部栓接,所述密封槽开设于防护壳的底部,所述密封槽的内部与密封垫的表面卡接。
15.可选的,所述密封垫,包括具有通孔的本体,在所述本体上于所述通孔的一侧设有安装孔,在所述安装孔的边沿固连有向远离所述安装孔轴线的方向延伸、并具有弹性的第一卡接部。
16.可选的,所述安装座的内部开设有两个安装孔一,所述安装孔一的底部连通有安装孔二。
17.可选的,所述防护壳内腔的顶部栓接有限位板,所述限位板的一侧开设有导向槽,所述导向槽的内部滑动连接有与连接杆栓接的导向块。
18.可选的,所述安装座的内部固定套接有轴承二,所述轴承二的内部与驱动马达输出端的表面转动套接。
19.本发明所取得的有益效果是:
20.1.通过设置振动传感器对无人机螺栓浆旋转所产生的振动频率进行监测,在无人机螺旋桨失控后,会在第一时间启动延伸机构,将遥感监测设备本体收入防护壳的内部,并利用防护机构对防护壳的底部进行封闭,起到了对遥感监测设备本体自我防护功能,进而使无人机失控情况下,也能保证遥感监测设备本体的完好性,从而降低了遥感监测设备本体损毁机率,降低了成本的浪费。
附图说明
21.从以下结合附图的描述可以进一步理解本发明。图中的部件不一定按比例绘制,而是将重点放在示出实施例的原理上。在不同的视图中,相同的附图标记指定对应的部分。
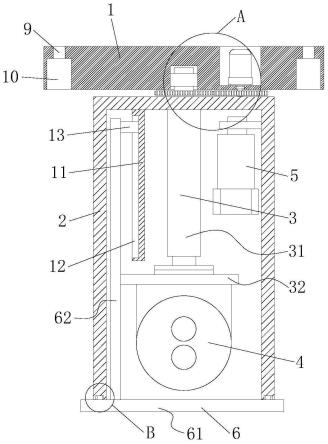
22.图1为本发明结构示意图。
23.图2为本发明图1中a处局部放大示意图。
24.图3为本发明图1中b处局部放大示意图。
25.图4为本发明结构使用示意图。
26.附图标号说明:1-安装座;2-防护壳;3-延伸机构;31-延伸气缸;32-固定板;4-遥感监测设备本体;5-振动传感器;6-防护机构;61-防护板;62-连接杆;7-旋转机构;71-驱动马达;72-齿轮一;73-齿轮二;74-轴承一;75-转动杆;8-密封机构;81-密封垫;82-密封槽;9-安装孔一;10-安装孔二;11-限位板;12-导向槽;13-导向块;14-轴承二。
具体实施方式
27.为了使得本发明的目的.技术方案及优点更加清楚明白,以下结合其实施例,对本发明进行进一步详细说明;应当理解,此处所描述的具体实施例仅用于解释本发明,并不用于限定本发明。对于本领域技术人员而言,在查阅以下详细描述之后,本实施例的其它系统.方法和/或特征将变得显而易见。旨在所有此类附加的系统.方法.特征和优点都包括在本说明书内.包括在本发明的范围内,并且受所附权利要求书的保护。在以下详细描述描述了所公开的实施例的另外的特征,并且这些特征根据以下将详细描述将是显而易见的。
28.本发明实施例的附图中相同或相似的标号对应相同或相似的部件;在本发明的描述中,需要理解的是,若有术语“上”.“下”.“左”.“右”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或组件必须具有特定的方位.以特定的方位构造和操作,因此附图中描述位置关系的用语仅用于示例性说明,不能理解为对本专利的限制,对于本领域的普通技术人员而言,可以根据具体情况理解上述术语的具体含义。
29.实施例一:一种无人机环境保护用生态遥感监测设备,包括安装座1、防护壳2、延伸机构3、遥感监测设备本体4、振动传感器5、防护机构6、旋转机构7和密封机构8,所述安装座1被配置为与无人机进行固定安装,所述防护壳2被配置为对其内部结构进行防护,所述延伸机构3被配置为带动遥感监测设备本体4进行升降,所述遥感监测设备本体4被配置为对生态环境进行遥感监测,所述振动传感器5被配置为对无人机的螺旋桨产生的振动进行监测,所述防护机构6被配置为对防护壳2的底部进行保护,所述旋转机构7被配置为带动防护壳2进行旋转,所述密封机构8被配置为对防护壳2的底部进行密封,所述延伸机构3、遥感监测设备本体4和振动传感器5均安装于防护壳2的内部,所述密封机构8位于防护机构6的顶部。
30.所述延伸机构3包括延伸气缸31和固定板32,所述延伸气缸31的顶端与防护壳2内腔的顶部栓接,所述延伸气缸31的底端与固定板32的顶部栓接,所述固定板32的底部与遥感监测设备本体4的顶部栓接;所述防护机构6包括防护板61和连接杆62,所述防护板61的顶部与防护壳2的底部接触,所述防护板61的顶部与连接杆62的底端栓接,所述连接杆62位于防护壳2的内部,所述连接杆62靠近固定板32的一侧与固定板32栓接;所述旋转机构7包括驱动马达71、齿轮一72、齿轮二73、轴承一74和转动杆75,所述旋转机构7安装于安装座1的内部,所述驱动马达71的输出端贯穿至安装座1的底部并与齿轮一72的内部固定套接,所述齿轮一72的表面与齿轮二73的表面啮合,所述齿轮二73的内部与转动杆75的表面固定套接,所述转动杆75的底端与防护壳2的顶部栓接,所述轴承一74的表面与安装座1的内部固
定套接,所述轴承一74的内部与转动杆75的表面转动套接;所述轴承一74,包括轴承外圈、滚动体、轴承内圈,所述轴承外圈的内滚道面包括三个向所述轴承外圈的内侧突出的凸起部,所述三个凸起部依次连接,在相邻两个所述凸起部的连接处形成凹部;所述凸起部和所述凹部均为弧线,所述三个凸起部沿所述轴承外圈安装座的周向均匀分布在所述内滚道面上;所述内滚道面的截面轮廓满足以下公式:r+0.052cos3θ;其中,r为所述轴承外圈安装座的内滚道的设计半径,θ为所述设计半径r所对应的起始角度;所述密封机构8包括密封垫81和密封槽82,所述密封垫81的底部与防护板61的顶部栓接,所述密封槽82开设于防护壳2的底部,所述密封槽82的内部与密封垫81的表面卡接;所述密封垫81,包括具有通孔的本体,在所述本体上于所述通孔的一侧设有安装孔,在所述安装孔的边沿固连有向远离所述安装孔轴线的方向延伸、并具有弹性的第一卡接部;所述安装座1的内部开设有两个安装孔一9,所述安装孔一9的底部连通有安装孔二10;所述防护壳2内腔的顶部栓接有限位板11,所述限位板11的一侧开设有导向槽12,所述导向槽12的内部滑动连接有与连接杆62栓接的导向块13;所述安装座1的内部固定套接有轴承二14,所述轴承二14的内部与驱动马达71输出端的表面转动套接。
31.实施例二:本实施例应当理解为至少包含前述任一一个实施例的全部特征,并在其基础上进一步改进,具体的,提供一种无人机环境保护用生态遥感监测设备,包括安装座1、防护壳2、延伸机构3、遥感监测设备本体4、振动传感器5、防护机构6、旋转机构7和密封机构8,所述安装座1被配置为与无人机进行固定安装,所述防护壳2被配置为对其内部结构进行防护,所述延伸机构3被配置为带动遥感监测设备本体4进行升降,所述遥感监测设备本体4被配置为对生态环境进行遥感监测,所述振动传感器5被配置为对无人机的螺旋桨产生的振动进行监测,所述防护机构6被配置为对防护壳2的底部进行保护,所述旋转机构7被配置为带动防护壳2进行旋转,所述密封机构8被配置为对防护壳2的底部进行密封,所述延伸机构3、遥感监测设备本体4和振动传感器5均安装于防护壳2的内部,所述密封机构8位于防护机构6的顶部。具体的,通过自攻螺丝穿过安装孔一9,将安装座1固定在无人机的底部,由无人机携带安装座1及安装座1底部的结构升空,无人机监测过程中,所述延伸气缸31启动并带动固定板32、遥感监测设备本体4和连接杆62向下,遥感监测设备本体4从而防护壳2的底部伸出即可进行监测,在本实施例中,所述旋转机构7驱动防护壳2进行旋转,所述防护壳2带动遥感监测设备本体4进行旋转可以显示360
°
全方位监控,扩大了设备的监测范围,在本实施例中,所述防护机构6能够和防护壳2的底部接触,利用防护机构6封堵防护壳2的底部,可避免遥感监测设备本体4被异物磕碰,在本实施例中,所述防护壳2和防护机构6均由铁或钢支撑,高空坠落后,遥感监测设备本体4不会受损,在本实施例中,所述遥感监测设备本体4伸出后启动可直接监测空气和水,在本实施例中,所述遥感监测设备本体4通过接收水中由太阳辐射经过折射、散射进入水体的部分,水中光、水面反射光、天空散射,通过得到探测结果是波长高度、入射角、观测角的函数,其中前面部分包含有水的信息,因而通过高空遥感手段探测水中光和水面反射光,以获得水色、水流、水面形态等信息,并由此推测有关浮游生物、浑浊水、油污、污水等的质量和数量以及水面风浪等有关信息,并且遥感监测设备本体4会利用遥感技术,实现对目标区域的pm2.5浓度及其前体物、污染来源等相关参数进行实时遥感监测,及时获取pm2.5、so2等指标的空间分布情况,并为空气质量模拟、预报以及污染控制提供技术基础,遥感监测设备本体4所采用的遥感技术弥补现有环境监测
手段在区域空间尺度上的不足,为摸清大气污染来源,实现各类污染源的监督管理、减排控制提供科学依据。
32.所述延伸机构3包括延伸气缸31和固定板32,所述延伸气缸31的顶端与防护壳2内腔的顶部栓接,所述延伸气缸31的底端与固定板32的顶部栓接,所述固定板32的底部与遥感监测设备本体4的顶部栓接。具体的,所述延伸气缸31带动固定板32和遥感监测设备本体4移动时,所述连接杆62会跟随固定板32移动,所述连接杆62移动会带动防护板61和防护壳2的底部分离,在本实施例中,所述防护板61位于遥感监测设备本体4的底部,所述防护板61和遥感监测设备本体4之间存在一定距离,所述防护板61不会影响遥感监测设备本体4的正常使用,在本实施例中,所述连接杆62和所述防护板61连接,所述防护板61随着所述连接杆62的移动而移动,在本实施例中,所述固定板32和遥感监测设备本体4之间也存在一定距离,所述固定板32也不会影响所述遥感监测设备本体4的正常使用。
33.在本实施例中,还提供一种用于对生态遥感监测设备的使用方法,所述方法包括:通过所述安装座1将设备与无人机安装;由无人机携带设备进行升空;所述延伸气缸31带动所述遥感监测设备本体4和所述防护板61下降,所述遥感监测设备本体4伸出防护壳2的底部开始监测;无人机启动时螺旋桨开始转动并产生振动,随会所述振动传感器5启动并对无人机螺旋桨旋转所产生的振动进行监测;所述振动传感器5监测到无人机螺旋桨稳定的振动数据后,进行保存,之后无极人升空;在无人机工作过程中,无人机的螺旋桨发生故障或无人机供电发生异常,无人机的螺旋桨停止工作,这时无人机向下坠落,所述振动传感器5感应到无人机螺旋桨旋转的振动发生变化,自动启动延伸气缸31,所述延伸气缸31启动后带动所述固定板32向上收回移动,而所述固定板32会带动遥感监测设备本体4和连接杆62向上,所述连接杆62会带动防护板61向上,待所述遥感监测设备本体4进入防护壳2的内部后,所述防护板61的顶部会与防护壳2的底部接触,从而对防护壳2的底部进行封堵,当无人机下坠过程,无人机螺旋桨正常运转时,所述振动传感器5再次监测到无人机螺旋桨的稳定振动,会再次启动延伸气缸31,使延伸气缸31带动遥感监测设备本体4下伸出防护壳2的内部。在本实施例中,无人机的供电源和该监测设备供电源均为独立供电,在本实施例中,所述延伸气缸31、振动传感器5、驱动马达71所需电源由监测设备的供电源提供。
34.所述防护机构6包括防护板61和连接杆62,所述防护板61的顶部与防护壳2的底部接触,所述防护板61的顶部与连接杆62的底端栓接,所述连接杆62位于防护壳2的内部,所述连接杆62靠近固定板32的一侧与固定板32栓接。具体的,所述防护板61的顶部和所述防护壳2的底部接触后,能够保证防护壳2在跌落时,防护壳2内部的遥感监测设备本体4不会受损,在本实施例中,所述连接杆62和固定板32连接,所述固定板32移动会同步带动连接杆62移动,而连接杆62则会同步带动防护板61移动。
35.所述旋转机构7包括驱动马达71、齿轮一72、齿轮二73、轴承一74和转动杆75,所述旋转机构7安装于安装座1的内部,所述驱动马达71的输出端贯穿至安装座1的底部并与齿轮一72的内部固定套接,所述齿轮一72的表面与齿轮二73的表面啮合,所述齿轮二73的内部与转动杆75的表面固定套接,所述转动杆75的底端与防护壳2的顶部栓接,所述轴承一74的表面与安装座1的内部固定套接,所述轴承一74的内部与转动杆75的表面转动套接。具体的,所述驱动马达71启动后带动齿轮一72转动,所述齿轮一72带动齿轮二73转动,齿轮二73带动转动杆75在轴承一74的内部转动,由于所述安装座1被无人机固定,因此转动杆75转动
会带动防护壳2及防护壳2内部的结构转动,在本实施例中,所述轴承一74和轴承二14的材质相同,所述轴承二14起到稳定驱动马达71输出端转动的作用,在本实施例中,所述轴承一74起到了辅助转动杆75转动的作用。
36.所述轴承一74,包括轴承外圈、滚动体、轴承内圈,所述轴承外圈的内滚道面包括三个向所述轴承外圈的内侧突出的凸起部,所述三个凸起部依次连接,在相邻两个所述凸起部的连接处形成凹部;所述凸起部和所述凹部均为弧线,所述三个凸起部沿所述轴承外圈安装座的周向均匀分布在所述内滚道面上;所述内滚道面的截面轮廓满足以下公式:r+0.052cos3θ;其中,r为所述轴承外圈安装座的内滚道的设计半径,θ为所述设计半径r所对应的起始角度。具体的,由于在轴承外圈的内滚道面包括多个向轴承外圈的内侧突出的凸起部,该多个凸起部依次连接,在相邻两个凸起部的连接处形成凹部。而且,内滚道面的截面轮廓满足以下公式:r+0.052cos3θ;其中,r为轴承外圈的内滚道的设计半径,θ为设计半径r所对应的起始角度。由公式计算得出的凸起部及凹部之间只有几微米,不影响滚动体的转动,因为凸起部的存在,轴承在高速转动时滚动体会在滚道中对轴承外圈产生微量循环冲击,该微量循环冲击通过轴承外圈施加在轴承座与轴承外圈的配合面,相当于给轴承加预负载,因此轴承高速轻载工况下能有效避免打滑现象,从而保证轴承的转动性能,提高轴承使用寿命。
37.所述密封机构8包括密封垫81和密封槽82,所述密封垫81的底部与防护板61的顶部栓接,所述密封槽82开设于防护壳2的底部,所述密封槽82的内部与密封垫81的表面卡接。具体的,所述密封垫81和密封槽82卡接后,密封垫81和密封槽82可以对防护壳2的底部进行密封,从而可在防护壳2掉入水中后对防护壳2内部的遥感监测设备本体4进行防护。
38.所述密封垫81,包括具有通孔的本体,在所述本体上于所述通孔的一侧设有安装孔,在所述安装孔的边沿固连有向远离所述安装孔轴线的方向延伸、并具有弹性的第一卡接部。具体的,通过在安装孔的边沿设置第一卡接部,在密封垫安装时,可将第一卡接部卡入法兰上的安装孔内,以使得密封垫可定位卡置在法兰上,能够省去人手固定密封垫的麻烦,而使得该密封垫具有较好的实用性,设置第二卡接部可在螺栓安装后将螺栓卡住,以避免螺栓脱落而便于其安装固定,第一卡接部和第二卡接部的角度布置,可使得密封垫更好的连接在法兰上,且也便于螺栓的安装紧固,第一卡接部设置为间隔布置的多个可便于其在法兰上的卡入,设置具有卡定部的第三卡接部使密封垫更稳定的卡置在法兰上,而便于管路连接作业,第三卡接部上设置导入部可便于密封垫于法兰上的卡置,卡定部和导入部弯折制成,可便于第三卡接部的设计制造,第三卡接部设置为间隔布置的多个可便于其在法兰上的卡置。
39.所述安装座1的内部开设有两个安装孔一9,所述安装孔一9的底部连通有安装孔二10。具体的,所述安装孔一9用于方便自攻螺丝和无人机安装,在本实施例中,所述安装孔二10可以用于对自攻螺丝进行固定,并能够对自动螺丝的安装座进行收纳。
40.所述防护壳2内腔的顶部栓接有限位板11,所述限位板11的一侧开设有导向槽12,所述导向槽12的内部滑动连接有与连接杆62栓接的导向块13。具体的,所述限位板11用于稳定导向块13和导向槽12的正常滑动,在本实施例中,所述导向块13在导向槽12的内部滑动可以保证连接杆62的稳定移动,通过固定板32和导向槽12与导向块13可以两次增强连接杆62在移动时的稳定性。
41.所述安装座1的内部固定套接有轴承二14,所述轴承二14的内部与驱动马达71输出端的表面转动套接。具体的,所述轴承二14起到了辅助驱动马达71输出端转动作用,并增强了驱动马达71输出端在转动时的可靠性。
42.在上述实施例中,对各个实施例的描述都各有侧重,某个实施例中没有详述或记载的部分,可以参见其它实施例的相关描述。
43.综上所述,本发明的一种无人机环境保护用生态遥感监测设备,通过设置振动传感器5对无人机螺栓浆旋转所产生的振动频率进行监测,在无人机螺旋桨失控后,会在第一时间启动延伸机构3,将遥感监测设备本体4收入防护壳2的内部,并利用防护机构6对防护壳2的底部进行封闭,起到了对遥感监测设备本体4自我防护功能,进而使无人机失控情况下,也能保证遥感监测设备本体4的完好性,从而降低了遥感监测设备本体4损毁机率,降低了成本的浪费。
44.虽然上面已经参考各种实施例描述了本发明,但是应当理解,在不脱离本发明的范围的情况下,可以进行许多改变和修改。也就是说上面讨论的方法,系统和设备是示例。各种配置可以适当地省略,替换或添加各种过程或组件。例如,在替代配置中,可以以与所描述的顺序不同的顺序执行方法,和/或可以添加,省略和/或组合各种部件。而且,关于某些配置描述的特征可以以各种其他配置组合,如可以以类似的方式组合配置的不同方面和元素。此外,随着技术发展其中的元素可以更新,即许多元素是示例,并不限制本公开或权利要求的范围。
45.在说明书中给出了具体细节以提供对包括实现的示例性配置的透彻理解。然而,可以在没有这些具体细节的情况下实践配置例如,已经示出了众所周知的电路,过程,算法,结构和技术而没有不必要的细节,以避免模糊配置。该描述仅提供示例配置,并且不限制权利要求的范围,适用性或配置。相反,前面对配置的描述将为本领域技术人员提供用于实现所描述的技术的使能描述。在不脱离本公开的精神或范围的情况下,可以对元件的功能和布置进行各种改变。
46.综上,其旨在上述详细描述被认为是例示性的而非限制性的,并且应当理解,以上这些实施例应理解为仅用于说明本发明而不用于限制本发明的保护范围。在阅读了本发明的记载的内容之后,技术人员可以对本发明作各种改动或修改,这些等效变化和修饰同样落入本发明权利要求所限定的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1