一种双翼四引擎铝件飞行姿态变换流派送无人机的制作方法
1.本发明涉及铝件钣金工艺技术领域,特别涉及一种双翼四引擎铝件飞行姿态变换流派送无人机。
背景技术:
2.随着社会技术能力的不断发展,随着北斗导航技术大量使用,随着5g手机人手一个的今天;借助北斗导航和5g信息传递包括视频app传输等,使得无人机的在城市间的物流派送快速送达成为可能;毕竟快捷性、方便性、时效性,备受到人们的关注。不过由于直升飞机在飞行时,所有负荷都需要由引擎承担,况且电池也是负载的一部分,所有效率不高,难以满足人们在长距和滞空能力的诉求。如果将无人机扩展出用翅膀飞行的话,像飞机一样,凭借迎风浮力/或升力的作用,节能效果大为提升,使的无人机的飞行距离和滞空能力得到很大的扩大,也就是说这样会带来根本的变化。
3.设想一下,如果无人机用直升飞机的方式完成升空,然后在空转换成有翼展-即如同飞机飞行一样的话,凭借迎风所产生的浮力/或升力,效率可以倍增;不仅如此,借助5 g和北斗导航技术加持,完全能开发出我们需要的电池驱动行驶的飞行姿态可变的无人机,来满足人们的物流派送的需求。
技术实现要素:
4.鉴于上述,本发明的目的旨在提供一种双翼四引擎铝件飞行姿态变换流派送无人机,通过无人机的飞行姿态转换,用带有双翼展开-及投影面积扩大所获前进方向上的空气浮力/或升力,实现符合时效巡航能力。进一步的,对于飞行姿态机电转换现实是基于铝件来满足创新和优化的特点,即在该装置在具备一定结构强度,性能和外观的情况下,在最大限度情况下实现了轻量化的目的;同时用铝件的塑性强的特点,显著降低其生产流程的加工难度,使生产成本得到了控制。进一步的,为了减小迎面风阻,箱体与姿态转换机构和电机的有机整合,使得无人机机体结构紧凑;进一步的,用双翼展开方式,实现飞行姿态的转换,效率更高且简单可靠;进一步的,也就是说很好的解决了可靠性、稳定性,安装和检修等问题。
5.为实现上述目的,本发明提供一种双翼四引擎铝件飞行姿态变换流派送无人机,其特征在于,包括:箱体,作为基础件,用于飞行姿态转换电机的嵌入,实现在升空后的飞行姿态转换,以完成物流派送;主副机翼组,与箱体两侧立板上的铰链座铰接,用于飞行姿态的转换包括主副机翼组展开时的投影面积的扩大,像飞机翅膀一样,实现浮力/或升力出现和提升;尾翼组,与箱体上后横梁铰链座铰接,用于飞行姿态稳定和实时调整,像飞机尾翼一样,完成水平和转弯控制也包括投影面积的扩大,利于飞行浮力/或升力提升;四引擎组,与前部横梁内四引擎姿态控制电机相连,用于无人机的垂直起飞到巡
航飞行时的姿态转换和驱动。
6.优选的,所述的飞行姿态转换无人机,其特征在于,所述箱体包括:所述箱体的两侧立板上下横向管状分割凸缘形成的铰链座孔内,用于主副机翼姿态控制电机在嵌入,同步/或非同步带动主副机翼在水平和垂直之间变换,实现起飞升空和飞行姿态的变换也包括起飞时的质心匹配;以及在箱体后部横梁横向管状分割凸缘形成的铰链座孔内,两侧有尾翼姿态控制电机的嵌入,用于带动各自尾翼在超水平和垂直之间变换,实现起飞到飞行姿态变换时的在无人机空位置的高度以及方位调节也包括垂直起飞时的质心的调节。
7.优选的,所述的飞行姿态转换无人机,其特征在于,所述箱体还包括:所述箱体上部前端有存储空间的下盖板封闭设置,用于完成锂电池组、飞行控制驱动电路、姿态传感电路包括高度和方位等、视频信号传送电路、5g或北斗定位电路、遥控电路等的装入。
8.优选的,所述的飞行姿态转换无人机,其特征在于,所述箱体还包括:所述箱体前部,有“合一”形式前开门结构;用于方便的解锁开门和方便的物件存取操作。
9.优选的,所述的飞行姿态转换无人机,其特征在于,所述箱体还包括:所述箱体上前部有横梁设置,用于在横梁内放置有四引擎姿态控制电机嵌入,用于完成垂直起飞到巡航飞行的实时转换,即转换成像飞机一样的平飞过程,以实现节能飞行。
10.本发明提供的一种双翼四引擎铝件飞行姿态变换流派送无人机,通过对装置各部件的优化包括模块化设计,尤其大部分部件均可通过铝件钣金工艺制成,实现了轻量化。进一步的,该无人机姿态变换电机嵌于箱体内,充分彰显了结构简单,降低了工艺难度和制造成本,且易于检查和维修等特点。显见,该无人机成本低,结构强度有保障,工艺简单,易于实现,可进行大批量生产。最重要的它的很好的适应性、实用性和长续航能力,便于很好的推进该无人机的在物流派送方面开创市场和普及应用,即为大众带来更多的便利。
附图说明
11.通过以下参照附图对本发明实施例的描述,本发明的上述以及其他目的、特征和优点将更为清楚,在附图中:图1为本发明实施例飞行姿态转换无人机巡航姿态时的装备示意图;图2为本发明实施例飞行姿态转换无人机垂直起飞时的装备示意图;图3为本发明实施例飞行姿态转换无人机箱体装备示意图;图4为本发明实施例飞行姿态转换前后横梁装备意图;图5为本发明实施例飞行姿态转换无人机主付机翼装备意图;图6为本发明实施例飞行姿态转换无人机尾翼装备示意图;图7为本发明实施例飞行姿态转换前开门结构示意图。
12.图8为本发明实施例飞行姿态转换无人机四引擎组装备示意图;具体实施方案以下将参照附图更详细地描述本发明的各种实施例。在各个附图中,相同的元件
采用相同或类似的附图标记来表示。为了清楚起见,附图中的各个部分尽量按比例绘制例如以箱体宽度和高度方向尺寸为基准的按比例绘制。此外,在图中可能未显示出某些公知的部分。
13.下面结合附图和实施例,对本发明的具体实施方式作进一步详细描述。在下文中描述了本发明的许多特定的细节,例如部件的结构、材料、尺寸、处理工艺和技术,以便更清楚地理解本发明。但正如本领域的技术人员能够理解的那样,可以不按照这些特定的细节来实现本发明。
14.下面结合附图和实施例,对本发明的具体实施方式作进一步详细描述。
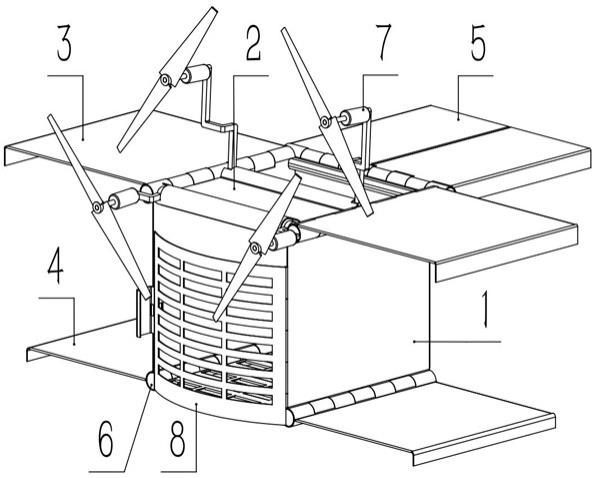
15.图1为本发明实施例飞行姿态转换无人机巡航姿态时的装备示意图;图中无人机包括:箱体1、横梁2、主机翼组3、副机翼组4、尾翼组5、带减速器的姿态控制电机6、四引擎组7、箱体前开门8。
16.箱体1,是用铝件,作为主件,放置在中心位置;在两侧上下部有纵向有管状分割凸缘,用于形成铰链座结构,以实现用铝件的主副机翼3和4在巡航飞行时的展开;在上横梁的后部有纵向管状分割凸缘,以形成铰链座结构,用于铝件的尾机5的飞行的姿态分别转换与控制,实现有效和多变的飞行姿态调节。进一步,在箱体迎面两侧立板上下有管状分割凸缘孔内,涂胶插入主副机翼带减速器的姿态控制电机61~62(带减速器的姿态控制电机统称6),形成固定,用于形成在巡航飞行时的产生迎风浮力/或升力,使飞行能耗大为下降。进一步,在顶部后部的横梁管状分割凸缘,用于两侧涂胶插入尾翼带减速器的姿态控制电机63,即在有风道的情况下,以完成无人机的上下浮动和转向功能。在箱体上部前后有两存储空间的下盖板设置,用以完成锂电池组、飞行控制驱动电路、姿态传感电路包括高度和方位等、视频信号传送电路、5g或北斗定位电路、遥控电路等的装入:在箱体前部,有“合一”加“u”型夹壁锁型的前开门结构;用于方便的压入上锁和拉动解锁开门操作,以完成方便的物件存取。
17.图2为本发明实施例飞行姿态转换无人机垂直起飞时的装备示意图;处于垂直起飞姿态,是由:箱体1、横梁2、主机翼组3、副机翼组4、尾翼组5、姿态转换控制电机6、四引擎组7、前封盖8组成。由图可见,起飞前主副机翼、尾翼都处于下垂紧缩姿态,型如箱体,缩小了垂直方向的投影面积,便于减小垂直起飞的能耗。对比图1,当主副机翼3、 4、尾翼5展开时,形成两翼扩大的投影面积包括尾翼展开的投影面积,在有风道的情况下,便于形成较大迎风的浮力/升力,像飞机一样,大大降低引擎驱动能耗,实现和保证了更长的滞空能力以及保证长飞行距离能力。
18.图3为本发明实施例飞行姿态转换无人机箱体装备示意图;如图所示,箱体整件,是用铝件钣金制作;其中,两侧立板11,作为整件的部分,位于在中心两侧;在该件上下部有纵向管状分割凸缘a11和b11,作为铰链座结构,用于主副机翼的铰接。进一步,在两侧上部迎面纵向有分割凸缘的圆孔,用于主副机翼带减速器的姿态控制电机涂胶插入61和62,电机轴心与主副机翼“方孔”四周平面嵌接,实现带的主副机翼姿态实时转换;在凸缘塞块66中心孔内有金属管67插入,用于含油脂对带减速器的姿态控制电机长“方轴”形成支撑,且与主副机翼“方孔”四周平面嵌接,以完成主副机翼的姿态控制电机的轴线与平台间无/或少阻力转动,即带动主副机翼与上平台从垂直到水平之间的转换,以实现起飞到巡航的姿态实时转换。在上横梁的后部有横向管状分割凸缘a21,形成铰链座结构,用于两尾翼的铰
接;进一步,在两侧分割凸缘孔内,用于尾翼带减速器的两姿态控制电机涂胶插入63,实现各带的尾翼姿态实时转换;进一步,在分割凸缘间的塞块中心孔内有金属管的插入,用于以形成含油脂的带减速器的姿态控制电机长“方轴”的支撑,且与尾翼塞块中的“方孔”四周平面嵌接,以完成各尾翼的姿态控制电机的轴线与上平台间无/或少阻力转动,即带动尾翼与上平台从垂直到过水平之间的转换,以实现无人机的巡航的平衡和转向功能。在上平面前部有横梁22设置,涂胶嵌入引擎姿态控制电机64和65;而两侧有“切缝”,用于通过连接板与擎姿态控制电机连接,对转角实施限位,以实现对引擎垂直升空和巡航飞行的姿态控制;在前部横梁中有存储空间的22,用下盖板进行封闭,以形成一个可装入锂电池和飞行控制驱动电路、姿态传感电路包括高度和方位等、视频信号传送电路、5g或北斗定位电路、遥控电路等;在箱体前部有箱体的“合一”形式的前开门设置包括左侧“u”型夹壁锁型的前开门结构,用于前开门的方便开合操作;在立板两侧有切槽,用于两横梁嵌入,并热风焊接固定。
19.根据本发明上述实施例提供的箱体结构,作为基础构件,是用铝件钣金方式制作完成;铝件的可塑性强,易于钣金制作。带减速器的姿态控制电机有机的嵌入或粘连在所述凸缘孔内,呈一体化结构;显现,结构简洁和可靠。
20.图4为本发明实施例飞行姿态转换前后横梁装备意图;如图21和22显示,上横档放置在顶部,是用铝件钣金工艺制作。在后端横向有管状分割凸缘a21,在孔内嵌入有金属套管的塞块66,用于形成铰链座结构;当安装在两侧的尾翼姿态控制电机63转动时,通过在涂脂的金属管67,形成插入的机翼带减速器的姿态控制电机似“方轴”的支撑,且与尾翼中心轴形成四周平面衔接,带动同步转动,以实现尾翼的姿态转换;在纵向左侧横梁22的内有存储空间e22的下封盖设置,螺丝封装,用于部分电池和电路的放入;在两侧端面有凸缘d22设置,与箱体的立板切槽嵌入,用热风枪焊接形成固定;在横梁中,两侧有切割b22和c22,以形成涂胶嵌入的带减速器的引擎姿态控制电机64 和65,形成对引擎连接板引出包括限位。
21.根据本发明上述实施例提供的前后横梁,作为支撑件,是用铝件钣金工艺制作完成;由于铝件塑性很好,且比强度高,工艺可控,实现便捷,是无人机理想的轻量化的选择。
22.图5为本发明实施例飞行姿态转换无人机主付机翼结装备意图;如图1和2显示,主付机翼放置箱体两侧,两两对应,是用铝件钣金工艺制作。该图31和41是左侧件,倒装反扣显示;在纵向右侧上下有管状分割凸缘a31和a41,用于形成铰链结构,与箱体中的立板铰链座铰接,通过安装在箱体两侧立板上的机翼姿态控制电机61和62的转动,以形成巡航时的姿态变换;在凸缘中心有似“方孔”的涂胶粘接的塞块32和42,用于插入机翼带减速器的姿态控制电机似“方轴”时,形成四周平面衔接,带动同步转动;在31件下部凸缘分割处,有用于与箱体中的立板铰链座无障碍的圆弧切割d31,以保证转动流畅和外观上不出现大的缝隙外显,利于无障碍转动和外观特征的提升;在前后两侧有翻边b31和b41,用于提高主副机翼的结构强度;在纵向左侧顶端有转角结构c31和c41,似飞机尾翼,能起到稳流作用,对飞行巡航中对抗风有利。
23.根据本发明上述实施例提供的主付机翼,作为转动件,是用铝件钣金工艺制作完成;由于铝件塑性很好,且比强度高,工艺可控,实现便捷,是无人机理想的轻量化的选择;关键是在主付机翼展开时,是形成的较大的投影面积关键,对巡航时的浮力/或升力的形成像飞机一样飞行是根本保证。
24.图6为本发明实施例飞行姿态转换无人机尾翼装备示意图;由图,尾翼51是左侧
件,倒置呈反置状,放置在箱体背面,是用铝件钣金制作;在纵向前部有横向管状切割凸缘a51,形成铰链结构,用于与箱体铰链座铰接,形成在飞行时的姿态变换;在凸缘中有似“方孔”状孔塞块42,用于插入机翼带减速器的姿态控制电机63似“方轴”时,形成四周平面衔接,带动同步转动;在分割切除处,有圆弧切,使铰链结构无障碍转动,以少缝隙状外显;在前侧有翻边b51处理,以提高尾翼的结构强度;在纵向右侧有转角结构c51处理,有利于在巡航姿态时,似飞机尾翼,能起到稳流抗风作用。
25.根据本发明上述实施例飞行姿态转换无人机提供的尾翼,是用铝件钣金工艺制作完成;由于铝件塑性很好,且比强度高,工艺可控,实现便捷,是无人机理想的轻量化的选择;带减速器的姿态控制电机嵌入箱体后部凸缘孔内,两尾翼可非同步转动,实现飞行时的水平飞行和转向时的有效和多变的控制。
26.图7为本发明实施例飞行姿态转换前开门结构示意图;由图,是用铝件钣金制作,有“切槽”的弧面体81,放置在箱体前部,用于在巡航飞行时的风阻减小(包括弧面和缝隙);在左侧约中部有带“u”型夹壁锁83和把手82,在右侧有“合一”机构形成转动分割销体84和销85,用于形成前封面的开合操作机构。
27.根据本发明上述实施例提供的前开门结构示意图;是用铝件钣金方式制成,由于铝件塑性很好,且比强度高,工艺可控,实现便捷,是无人机理想的轻量化的选择;特别“合一”形式构造,显出处存取物件的方便特征。
28.图8为本发明实施例飞行姿态转换无人机引擎组装配示意图;由图,引擎组是由驱动电机71、连接板72、叶片73、引擎姿态控制电机65组成。四引擎姿态控制电机,涂胶插入前中部横档两侧,用于引擎的姿态控制;当四引擎电机两两反向旋转工作时,可以形成向上的升力,以形成无人机的垂直升空;如果无人机升空后,姿态控制电机向飞行方向旋转的话,就会形成无人机像飞机一样的平飞状态,即实现了飞行姿态的实时转换。
29.根据本发明上述实施例提供的四引擎驱动组,其中,叶片是用注塑/或3d打印方式制作,显示出工艺简单,实现便捷的特点;根据本发明上述实施飞行姿态转换无人机例提供的引擎组中驱动电机,宜用高效电机例如无刷电机实现。
30.综上所述,本发明的实施例一种双翼四引擎铝件钣金飞行姿态变换流派送无人机,具有明显的起飞时的结构紧缩特征和飞行姿态时的双机翼展开特征,使得从起飞到巡航飞行时的能耗大幅度降低;尤其在巡航能力方面得到大大加强。主件是系铝件钣金工艺制备,得到很好的优化包括轻量化结构,使得了结构简练,对整体的制成带来了方便,也使成本得到了很好的控制。嵌于箱体中的带减速器的姿态控制电机对引擎、主机翼、副机翼、尾翼控制带来了很好的有机配合,体积减小;同时,对引擎、主副机翼、尾翼的分别控制,加强了飞行姿态的很好的把控。总之一种双翼四引擎铝件钣金飞行姿态变换流派送无人机,是由比较实际尺寸绘制,可以细化型图,用于指导生产;同时致力简单、可靠、低价的原则,也为可以进一步推进无人机技术的普及和应用起到助力作用。
31.以上所述仅为本发明的优选实施例并不用于限制本发明,对于本领域技术人员而言,本发明可以有各种改动和变化。凡在本发明的精神和原理之内所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1