一种航拍测绘用具有防跌损功能的无人机的制作方法
1.本发明涉及航拍测绘技术领域,具体为一种航拍测绘用具有防跌损功能的无人机。
背景技术:
2.无人驾驶飞机简称“无人机”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,机上无驾驶舱,但安装有自动驾驶仪、程序控制装置等设备,地面、舰艇上或母机遥控站人员通过雷达等设备,对其进行跟踪、定位、遥控、遥测和数字传输,可在无线电遥控下像普通飞机一样起飞或用助推火箭发射升空,也可由母机带到空中投放飞行,回收时,可用与普通飞机着陆过程一样的方式自动着陆,也可通过遥控用降落伞或拦网回收,可反复使用多次,广泛用于空中侦察、监视、通信、反潜、电子干扰等;
3.引用现有的专利进行对比,专利名称为一种无人机空中防坠落装置,专利申请号为cn201810051756.7,该专利公开了一种无人机空中防坠落装置,包括无人机壳体,所述无人机壳体的上部嵌入设有防坠腔,该防坠腔口部的两侧固定设有铰链,且铰链铰接连接两组防坠腔门的尾部,所述防坠腔内部的两侧固定安装有两根伸缩杆,所述防坠腔门的底部固定安装有推送滑轨,所述伸缩杆的头部设有滑动件,该滑动件滑动卡设在推送滑轨内,所述防坠腔内部的底端固定连接防坠伞腔的底部,本发明无人机在坠落时,可以被速度检测器或者压力传感器检测出,此时伸缩杆伸长,伸缩杆头部的滑动件在推动滑轨中滑动,推开防坠腔门,在弹簧的弹力作用下,弹射板迅速弹射,将防坠伞弹出,防坠伞展开后可以防止无人机坠落;
4.上述专利通过在顶部设置防坠伞进行减震,但是仅仅通过在顶部设置防坠伞,并没有很好的防坠效果,不能有效的保护无人机。
技术实现要素:
5.针对现有技术的不足,本发明提供了一种航拍测绘用具有防跌损功能的无人机,以解决上述背景技术中提出的问题。
6.为实现以上目的,本发明通过以下技术方案予以实现:一种航拍测绘用具有防跌损功能的无人机,包括航拍测绘机构,所述航拍测绘机构包括无人机,无人机连接内部的蓄电池启动,无人机通过连接支架上的扇叶转动,使无人机飞行然后进行航拍测绘,在无人机飞行过程中坠落时,当无人机竖向飞行时,第二斜块为锥形,所以使无人机的竖向受力不均匀,继而使无人机不再保持竖向落下,当无人机的上方朝下坠落时,第二斜块位于无人机上,第二斜块的顶部大于底部的大小,所以无人机顶部的受力面大于无人机的底部,降低无人机的下落速度,所述无人机的顶部固定连接有连接支架的一端,所述连接支架的数量为四个,所述连接支架的另一端转动连接有扇叶,且扇叶的数量也是四个,所述无人机的外壁固定连接有气流流通机构,无人机正向下落时,气流从第二孔洞进入,然后气流从第一孔洞中吹出,气流为横向的吹出,使无人机保持横向的下落,无人机横向的设置减少了无人机下
落的损坏,弧形板的设置,在无人机竖向设置时,弧形板拦截气流进入到第一孔洞中,所述无人机的外壁还固定连接有自动防护机构;
7.所述气流流通机构包括第一孔洞,所述无人机的外壁开设有第一孔洞,所述无人机的底部开设有第二孔洞,所述无人机的内部开设有空腔,所述第一孔洞、空腔和第二孔洞相互连通,所述无人机外壁位于第一孔洞的位置固定连接有两个弧形板。
8.优选的,所述无人机的顶部固定连接有第一斜块,第一斜块为斜向的锥形,所以第一斜块与气流相互冲击时,使无人机可以歪斜,然后使无人机的底部面向气流,无人机底部面向下落的反向冲击气流时,无人机的横向设置大于无人机的竖向设置,降低无人机的下落速度,无人机下落时,气流从第二孔洞进入到空腔中,然后气流从第一孔洞中吹出,第一孔洞为横向设置,气流在吹出时,可以使无人机保持平衡,使无人机保持横向的下落。
9.优选的,所述无人机的外壁固定连接有第二斜块,第二斜块为锥形设置,继而使第二斜块引导无人机正向落下,配合第一斜块的设置,使无人机为横向的下落,无人机横向的下落速度小于无人机竖向的下落速度,减少了无人机的下落速度进而减小了无人机的损坏,第一斜块为斜向的设置的,会引导气流流向,使无人机受到的气流流向方向不对等,继而使无人机歪斜。
10.优选的,所述自动防护机构包括外壳,在无人机下落过程中,气流从外壳和无人机之间经过,无人机的下落速度大于无人机的正常飞行速度,气流带动开关活动继而启动感应器,感应器与风机通过电源线连接,使风机往气囊中加入气流,继而使气囊鼓起,气囊在鼓起后增大,继而使气囊对无人机的下坠进行防护,感应器也会带动伸缩机启动,伸缩机控制伸缩杆伸长,伸缩杆伸长后使椭圆环防护在无人机外部,椭圆环的伸出继而对无人机进行防护,所述外壳的外壁与无人机的外壁固定连接,且外壳的数量为四个。
11.优选的,所述外壳的外壁固定连接有气囊,所述外壳内壁位于气囊的位置固定连接有风机。
12.优选的,所述风机和气囊固定连接。
13.优选的,所述外壳与无人机之间固定连接有感应器,无人驾驶飞机简称“无人机”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,机上无驾驶舱,但安装有自动驾驶仪、程序控制装置等设备,地面、舰艇上或母机遥控站人员通过雷达等设备,对其进行跟踪、定位、遥控、遥测和数字传输,无人机在下落过程中,下落时的气流大于正常飞行的速度,所以气流带动开关活动,使感应器启动后带动风机和伸缩机的启动,继而使椭圆环伸出与气囊充气,对无人机进行防护,减缓了无人机的损坏,所述感应器的外壁固定连接有开关。
14.优选的,所述外壳的顶部与底部固定连接有两个伸缩机,所述伸缩机的外壁活动连接有伸缩杆,所述伸缩杆的外壁固定连接有椭圆环。
15.本发明提供了一种航拍测绘用具有防跌损功能的无人机。具备以下有益效果:
16.1、该航拍测绘用具有防跌损功能的无人机,通过第二斜块为锥形设置,继而使第二斜块引导无人机正向落下,配合第一斜块的设置,使无人机为横向的下落,无人机横向的下落速度小于无人机竖向的下落速度,减少了无人机的下落速度进而减小了无人机的损坏。
17.2、该航拍测绘用具有防跌损功能的无人机,通过无人机正向下落时,气流从第二
孔洞进入,然后气流从第一孔洞中吹出,气流为横向的吹出,使无人机保持横向的下落,无人机横向的设置减少了无人机下落的损坏,弧形板的设置,在无人机竖向设置时,弧形板拦截气流进入到第一孔洞中。
18.3、该航拍测绘用具有防跌损功能的无人机,通过无人机在下落过程中,下落时的气流大于正常飞行的速度,所以气流带动开关活动,使感应器启动后带动风机和伸缩机的启动,继而使椭圆环伸出与气囊充气,对无人机进行防护,减缓了无人机的损坏。
附图说明
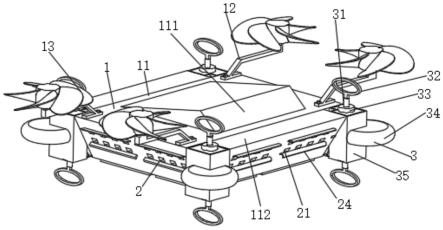
19.图1为本发明轴侧立体结构示意图;
20.图2为本发明图1中空腔位置剖视结构示意图;
21.图3为本发明图2中a部放大结构示意图;
22.图4为本发明图1中仰视空腔位置剖视结构示意图;
23.图5为本发明仰视立体结构示意图;
24.图6为本发明图5中b部放大结构示意图。
25.图中:1、航拍测绘机构;11、无人机;111、第一斜块;112、第二斜块;12、连接支架;13、扇叶;2、气流流通机构;21、第一孔洞;22、空腔;23、第二孔洞;24、弧形板;3、自动防护机构;31、伸缩杆;32、椭圆环;33、伸缩机;34、气囊;35、外壳;36、风机;37、开关;38、感应器。
具体实施方式
26.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
27.所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
28.实施例一
29.请参阅图1-3,本发明提供一种技术方案:一种航拍测绘用具有防跌损功能的无人机,包括航拍测绘机构1,航拍测绘机构1包括无人机11,无人机11连接内部的蓄电池启动,无人机11通过连接支架12上的扇叶13转动,使无人机11飞行然后进行航拍测绘,在无人机11飞行过程中坠落时,当无人机11竖向飞行时,第二斜块112为锥形,所以使无人机11的竖向受力不均匀,继而使无人机11不再保持竖向落下,当无人机11的上方朝下坠落时,第二斜块112位于无人机11上,第二斜块112的顶部大于底部的大小,所以无人机11顶部的受力面大于无人机11的底部,降低无人机11的下落速度,无人机11的顶部固定连接有连接支架12的一端,连接支架12的数量为四个,连接支架12的另一端转动连接有扇叶13,且扇叶13的数量也是四个,无人机11的外壁固定连接有气流流通机构2,无人机11的外壁还固定连接有自动防护机构3;
30.气流流通机构2包括第一孔洞21,无人机11的外壁开设有第一孔洞21,无人机11的底部开设有第二孔洞23,无人机11的内部开设有空腔22,第一孔洞21、空腔22和第二孔洞23相互连通,无人机11外壁位于第一孔洞21的位置固定连接有两个弧形板24。
31.本实施方案中,通过。
32.无人机11的顶部固定连接有第一斜块111,第一斜块111为斜向的锥形,所以第一斜块111与气流相互冲击时,使无人机11可以歪斜,然后使无人机11的底部面向气流,无人机11底部面向下落的反向冲击气流时,无人机11的横向设置大于无人机11的竖向设置,降低无人机11的下落速度,无人机11下落时,气流从第二孔洞23进入到空腔22中,然后气流从第一孔洞21中吹出,第一孔洞21为横向设置,气流在吹出时,可以使无人机11保持平衡,使无人机11保持横向的下落;
33.无人机11的外壁固定连接有第二斜块112。
34.使用时,无人机11连接内部的蓄电池启动,无人机11通过连接支架12上的扇叶13转动,使无人机11飞行然后进行航拍测绘,在无人机11飞行过程中坠落时,当无人机11竖向飞行时,第二斜块112为锥形,所以使无人机11的竖向受力不均匀,继而使无人机11不再保持竖向落下,当无人机11的上方朝下坠落时,第二斜块112位于无人机11上,第二斜块112的顶部大于底部的大小,所以无人机11顶部的受力面大于无人机11的底部,降低无人机11的下落速度,第一斜块111为斜向的锥形,所以第一斜块111与气流相互冲击时,使无人机11可以歪斜,然后使无人机11的底部面向气流,无人机11底部面向下落的反向冲击气流时,无人机11的横向设置大于无人机11的竖向设置,降低无人机11的下落速度,无人机11下落时,气流从第二孔洞23进入到空腔22中,然后气流从第一孔洞21中吹出,第一孔洞21为横向设置,气流在吹出时,可以使无人机11保持平衡,使无人机11保持横向的下落。
35.实施例二
36.在实施例一的基础上,请继续参阅图4-6,添加如下特征:
37.自动防护机构3包括外壳35,外壳35的外壁与无人机11的外壁固定连接,且外壳35的数量为四个;
38.外壳35的外壁固定连接有气囊34,外壳35内壁位于气囊34的位置固定连接有风机36;
39.风机36和气囊34固定连接;
40.外壳35与无人机11之间固定连接有感应器38,在无人机11下落过程中,气流从外壳35和无人机11之间经过,无人机11的下落速度大于无人机11的正常飞行速度,气流带动开关37活动继而启动感应器38,感应器38与风机36通过电源线连接,使风机36往气囊34中加入气流,继而使气囊34鼓起,气囊34在鼓起后增大,继而使气囊34对无人机11的下坠进行防护,感应器38的外壁固定连接有开关37;
41.外壳35的顶部与底部固定连接有两个伸缩机33,感应器38也会带动伸缩机33启动,伸缩机33控制伸缩杆31伸长,伸缩杆31伸长后使椭圆环32防护在无人机11外部,椭圆环32的伸出继而对无人机11进行防护,伸缩机33的外壁活动连接有伸缩杆31,伸缩杆31的外壁固定连接有椭圆环32;
42.本实施方案中,通过。
43.使用时,在无人机11下落过程中,气流从外壳35和无人机11之间经过,无人机11的下落速度大于无人机11的正常飞行速度,气流带动开关37活动继而启动感应器38,感应器38与风机36通过电源线连接,使风机36往气囊34中加入气流,继而使气囊34鼓起,气囊34在鼓起后增大,继而使气囊34对无人机11的下坠进行防护,感应器38也会带动伸缩机33启动,伸缩机33控制伸缩杆31伸长,伸缩杆31伸长后使椭圆环32防护在无人机11外部,椭圆环32
的伸出继而对无人机11进行防护。
44.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1