一种高空救援转移设备及救援转移方法与流程
1.本发明涉及高空救援技术领域,尤其涉及一种高空救援转移设备及救援转移方法。
背景技术:
2.随着社会经济的飞速发展,高层建筑和超高层建筑越来越多,如高大场馆设施和建构筑物等,造成了越来越多复杂的高空救援环境,给高空救援带来了极大挑战。高空救援的难度大,危险性高,因此,高空救援工作不易展开。
3.例如,当楼层爆炸或失火等高空危险事故发生时,由于事故往往是突发的且危险性持续扩大蔓延,因此,处于火灾楼层或火灾楼层之上楼层的人员往往受困于楼层中,无法转移到下方安全的楼层。这种情况下,现有技术中,受困人员通常只能躲避在相对封闭的空间以远离火势,或者逃到天台等待救援,然而,当楼梯无法通行或天台楼层不通时,则受困人员只能困于原地,无法通过其它渠道进行自救。
4.另一方面,现有技术中通常采用索道下降装置、弹力管救援装置、柔性救生滑梯、可挂式救生梯以及各种样式的便携升降机等消防救援设备进行高空救援,然而,这些设备在使用之前,需先把设备固定到高于高空受困人员的位置,然后才能展开救援。而这些救援设备固定点的选择比较麻烦,受制于场地特殊、环境复杂,因此,需要针对复杂环境先观察再研究设备固定点,往往耽误了最佳救援时间。此外,由于普通消防车、云梯车等作业高度有限,同时受地面交通影响较大,已经不能满足高空救援的需求。
5.因此亟需一种高空救援转移设备及救援转移方法以解决上述问题。
技术实现要素:
6.本发明的一个目的在于提供一种高空救援转移设备,通过设置固定承载单元和伸缩通道单元来调整救援通道长度,以便在事发建筑与附近建筑间建立安全转移通道或将涉险人员及物资安全送达地面,进而实现快速大规模人员及物资救援,同时能够减少地面交通对高空救援作业的影响,提高高空救援效率。
7.为达此目的,本发明采用了以下方案:
8.一种高空救援转移设备,包括救援平台装置、动力提升装置和控制单元,该控制单元与该救援平台装置以及该动力提升装置通讯连接,该控制单元用于控制该救援平台装置和该动力提升装置工作,该动力提升装置与该救援平台装置连接,该动力提升装置被配置为提供动力并提升该救援平台装置至待救援位置,该动力提升装置包括第一支架、第二支架、螺旋桨叶片、驱动件和转动机构,该第一支架与该第二支架层叠设置,该第一支架通过该转动机构与该第二支架转动连接,该第一支架和该第二支架上均设置有安装孔,该螺旋桨叶片设置于该安装孔内,该驱动件的输出端与该螺旋桨叶片连接,该驱动件被配置为驱动该螺旋桨叶片转动,该救援平台装置包括固定承载单元和伸缩通道单元,该固定承载单元连接于该第一支架底面,该固定承载单元形成救援通道,该救援通道用于承载待救援人
员和物资,该伸缩通道单元设置于该固定承载单元侧边,该伸缩通道单元能够向外伸缩以调整该救援通道长度。
9.示例性地,该转动机构包括旋转固定座、转轴和转轮,该旋转固定座设置于该第一支架上,该转轴套设于该旋转固定座内,该转轴的一端与该第二支架连接,该转轴的另一端与该转轮连接。
10.示例性地,该转轴侧面设置有两个限位杆,两个限位杆呈180
°
分布于所述转轴侧面,该转动机构还包括四个自锁组件,四个自锁组件均匀分布于旋转固定座周向,每个该自锁组件包括自锁刀件、弹性件、定位销、手轮、套筒、密封盖和自锁杆,该自锁刀件设置有开口向下的限位槽,该限位槽用于限制该限位杆的移动,该自锁杆的一端与该自锁刀件连接,该自锁杆的另一端与该手轮连接,该定位销与该弹性件抵接,该弹性件套设于该自锁杆上,该套筒套设于该弹性件和该定位销外,该套筒侧边开设有倒l型孔,该定位销活动设置于该倒l型孔内,该密封盖用于封堵该套筒的下端。
11.示例性地,该固定承载单元包括四个第一竖杆、底板和防护网,四个该第一竖杆平行竖直设置,该第一竖杆的顶部与该第一支架连接,该第一竖杆的底部连接于该底板,该防护网设置于前面和后面的相邻的两个该第一竖杆之间。
12.示例性地,该伸缩通道单元包括通道框架始端、通道框架中端、通道框架尾端、通道底板、防护网、推杆、传动杆、第一传动杆、第二传动杆、第三传动杆和电磁组件,该通道框架始端、该通道框架中端和该通道框架尾端沿该固定承载单元的侧面延伸方向平行设置形成救援通道,该通道底板铺设于该通道框架始端、该通道框架中端和该通道框架尾端之间,该通道底板能够折叠和展开,该传动杆一端与该通道框架始端转动连接,该传动杆的另一端与该第一传动杆转动连接,该第一传动杆的另一端转动连接于该通道框架中端并与该第二传动杆齿轮啮合传动连接,该第二传动杆与该第一传动杆齿轮连接的一端转动连接于该通道框架中端,该第二传动杆的另一端与该第三传动杆转动连接,该第三传动杆的另一端转动连接于该通道框架尾端,该推杆的一端与该通道框架始端转动连接,该推杆的另一端转动连接于该传动杆的中部,该推杆能够伸缩,该电磁组件设置于该通道框架中端,该电磁组件用于控制该第二传动杆和该第一传动杆之间的齿轮啮合,该防护网设置于该救援通道的外侧。
13.示例性地,该通道框架中端开设有槽型孔,该第二传动杆包括直杆、转动轴和第二齿轮,该直杆与该转动轴连接,该第二齿轮套设于该转动轴上,该转动轴穿设于该槽型孔,第一传动杆包括第一齿轮,该电磁组件包括固定导轨、固定件、复位弹簧、电磁卡扣和电磁吸盘,该槽型孔经过该固定导轨的行程,该电磁卡扣滑动设置于该固定导轨上,该固定件和该电磁吸盘分设于该电磁卡扣的两侧,该复位弹簧设置于该固定件和该电磁卡扣之间,该电磁吸盘通电时控制该电磁卡扣靠近该电磁吸盘,该复位弹簧在该电磁吸盘断电时将该电磁卡扣拉向远离电磁吸盘的初始位置。
14.示例性地,该通道底板还包括支撑组件,支撑组件设置于通道框架始端、通道框架中端以及通道框架尾端底部,支撑组件包括支撑支架、左支撑件、右支撑件和驱动组件,该左支撑件和该右支撑件均与该支撑支架转动连接,该驱动组件的输出端与该左支撑件以及该右支撑件连接,该驱动组件用于驱动该左支撑件和该右支撑件向外侧转动。
15.示例性地,该高空救援转移设备还包括图像采集装置,该图像采集装置与该动力
提升装置连接,该图像采集装置与该控制单元通讯连接,该图像采集装置被配置为采集待救援位置及周边图像信息。
16.示例性地,该高空救援转移设备还包括距离采集装置,该距离采集装置与该动力提升装置连接,该距离采集装置与该控制单元通讯连接,该距离采集装置被配置为测量该救援平台装置与待救援位置以及待救援位置与附近建筑间的距离。
17.本发明的另一个目的在于提供一种救援转移方法,能够准确快速找到并到达待救援位置,实现高层或超高层建筑的快速大规模救援,能够减少地面交通对高空救援作业的影响,提高高空救援效率。
18.为达此目的,本发明采用了以下方案:
19.一种救援转移方法,采用上述的高空转移设备,该救援转移方法包括:
20.通过该图像采集装置采集待救援位置及周边图像信息,判断事发建筑附近的事故情况,找到适于建立救援转移通道的位置;
21.通过距离采集装置测量该救援平台装置与待救援位置以及待救援位置与附近建筑间的距离,以判断该伸缩通道单元需要伸缩的长度;
22.该电磁组件通电使该第一传动杆与该第二传动杆齿轮啮合传动,该推杆伸长推动该传动杆转动,带动该第一传动杆、该第二传动杆和该第三传动杆转动,以使该通道框架中端和该通道框架尾端沿该固定承载单元的侧面方向延伸以调整该救援通道长度;
23.若该救援通道过长,旋转该转动机构,使该第一支架和该第二支架成90
°
;
24.快速转移涉险人员及物资到附近安全建筑或安全送达地面。
25.本发明的有益效果为:
26.本发明提供的高空救援转移设备,通过动力提升装置准确、快速将救援平台装置提升至待救援位置,能够实现高层或超高层建筑的快速大规模救援,同时由于动力提升装置无需地面支撑设备,能够减少地面交通对高空救援作业的影响,提高高空救援效率。通过设置固定承载单元和伸缩通道单元来调整救援通道长度,以便在事发建筑与附近建筑间建立安全转移通道或将涉险人员及物资安全送达地面,进而实现快速大规模人员及物资救援,以提升高空救援转移设备的高空救援能力。由于第一支架和第二支架可以相对转动,转动第二支架能够扩大动力提升装置中螺旋桨叶片的分布面积,以提升动力提升装置的升力,当通道过长时,为高空救援转移设备提供足够的升力,以确保高空救援转移设备能够保持稳定,确保有足够的升力保证将通道中的人员及物资转移到附近安全建筑物或安全送达地面。
27.本发明提供的救援转移方法,能够准确快速找到并到达待救援位置,实现高层或超高层建筑的快速救援,能够减少地面交通对高空救援作业的影响,提高高空救援效率。
附图说明
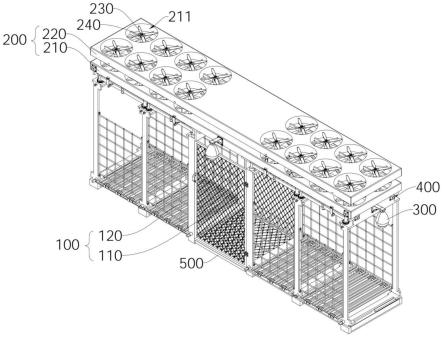
28.图1是本发明提供的高空救援转移设备的结构示意图;
29.图2是本发明提供的救援平台装置的结构示意图;
30.图3是本发明提供的转动机构的结构示意图;
31.图4是图2中a处的局部放大图;
32.图5是本发明提供的支撑支架的结构示意图。
33.图中:
34.100、救援平台装置;110、固定承载单元;111、第一竖杆;112、底板;113、防护网;120、伸缩通道单元;121、通道框架始端;122、通道框架中端;123、通道框架尾端;124、通道底板;1240、支撑组件;1242、左支撑件;1243、右支撑件;1244、驱动组件;12441、第一涡轮;12442、第二涡轮;12443、第一蜗杆;12444、第二蜗杆;12445、第一联轴器;12446、第二联轴器;12447、第一传动轴;12448、第二传动轴;12449、第一圆柱齿轮;12450、第二圆柱齿轮;12451、驱动电机;125、柔性防护网;126、推杆;127、传动杆;128、第一传动杆;1281、第一齿轮;129、第二传动杆;1291、直杆;1292、转动轴;1293、第二齿轮;130、第三传动杆;131、电磁组件;1311、固定导轨;1312、固定件;1313、复位弹簧;1314、电磁卡扣;1315、电磁吸盘;200、动力提升装置;210、第一支架;211、安装孔;220、第二支架;230、螺旋桨叶片;240、驱动件;250、转动机构;251、旋转固定座;252、转轴;2521、限位杆;253、转轮;254、自锁组件;2541、自锁刀件;25411、限位槽;2542、弹性件;2543、定位销;2544、手轮;2545、套筒;25451、倒l型孔;2546、密封盖;2547、自锁杆;300、图像采集装置;400、距离采集装置;500、电源组件。
具体实施方式
35.下面结合附图并通过具体实施方式来进一步说明本发明的技术方案。可以理解的是,此处所描述的具体实施例仅仅用于解释本发明,而非对本发明的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本发明相关的部分而非全部。
36.本发明中限定了一些方位词,在未作出相反说明的情况下,所使用的方位词如“上”、“下”、“左”、“右”、“内”、“外”,这些方位词是为了便于理解而采用的,因而不构成对本发明保护范围的限制。
37.在本发明中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征水平高度小于第二特征。
38.在本发明的描述中,除非另有明确的规定和限定,术语“相连”、“连接”、“固定”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
39.如图1和图2所示,本实施例提供了一种高空救援转移设备,包括救援平台装置100、动力提升装置200和控制单元,控制单元与救援平台装置100以及动力提升装置200通讯连接,控制单元用于控制救援平台装置100和动力提升装置200工作,动力提升装置200与救援平台装置100连接,动力提升装置200用于提供动力并提升救援平台装置100至待救援位置,动力提升装置200包括第一支架210、第二支架220、螺旋桨叶片230、驱动件240和转动机构250,第一支架210与第二支架220层叠设置,第一支架210通过转动机构250与第二支架220转动连接,第一支架210和第二支架220上均设置有安装孔211,螺旋桨叶片230设置于安
装孔211内,驱动件240的输出端与螺旋桨叶片230连接,驱动件240用于驱动螺旋桨叶片230转动,救援平台装置100包括固定承载单元110和伸缩通道单元120,固定承载单元110连接于第一支架210底面,固定承载单元110形成救援通道,救援通道用于承载待救援人员和物资,伸缩通道单元120设置于固定承载单元110侧边,伸缩通道单元120能够向外伸缩以调整救援通道长度。本实施例中的高空救援转移设备通过动力提升装置200准确、快速将救援平台装置100提升至待救援位置,能够实现高层或超高层建筑的快速救援,同时由于动力提升装置200无需地面支撑设备,能够减少地面交通对高空救援作业的影响,提高高空救援效率。本实施例中的高空救援转移设备通过设置固定承载单元110和伸缩通道单元120来调整救援通道长度,以便在事发建筑与附近建筑间建立安全转移通道或将涉险人员及物资安全送达地面,进而实现快速大规模人员及物资救援,以提升高空救援转移设备的高空救援能力。由于第一支架210和第二支架220可以相对转动,转动第二支架220能够扩大动力提升装置200中螺旋桨叶片230的分布面积,以提升动力提升装置200的升力,当通道过长时,为高空救援转移设备提供足够的升力,以确保高空救援转移设备能够保持稳定,确保有足够的升力保证将通道中的人员及物资转移到附近安全建筑物或安全送达地面。
40.具体地,在提升过程中,驱动件240驱动螺旋桨叶片230转动,螺旋桨叶片230在转动过程中产生升力,提升第一支架210和第二支架220,并将与动力提升装置200连接的其他部件一同提升至待救援位置,能够减少对地面设备的依赖,从而减少地面交通情况对救援工作的影响,能够实现高层或超高层建筑救援。优选地,本实施例中的第一支架210和第二支架220开设有多个通孔,多个通孔呈矩阵分布,动力提升装置200包括多个螺旋桨叶片230和多个驱动件240,多个螺旋桨叶片230和多个驱动件240对应设置于多个通孔内,从而保证有足够的升力来提升整个设备。具体地,本实施例中的驱动件240可以是电机。
41.进一步地,为了实现第一支架210和第二支架220之间的相对转动,本实施例中的转动机构250包括旋转固定座251、转轴252和转轮253,旋转固定座251设置于第一支架210上,转轴252套设于旋转固定座251内,转轴252的一端与第二支架220连接,转轴252的另一端与转轮253连接。通过旋转转轮253,能够转动转轴252,从而使第二支架220跟随转动,使第二支架220与第一支架210的角度错开,扩大螺旋桨叶片230的分布面积,从而增大动力提升装置200的升力。
42.请结合参考图3,进一步地,为了方便调整和固定第一支架210与第二支架220之间的角度,本实施例中的转轴252侧面设置有两个限位杆2521,两个限位杆2521呈180
°
分布于转轴252侧面,转动机构250还包括四个自锁组件254,四个自锁组件254均匀分布于旋转固定座251周向,每个自锁组件254包括自锁刀件2541、弹性件2542、定位销2543、手轮2544、套筒2545、密封盖2546和自锁杆2547,自锁刀件2541设置有开口向下的限位槽25411,限位槽25411用于限制限位杆2521的移动,自锁杆2547的一端与自锁刀件2541连接,自锁杆2547的另一端与手轮2544连接,定位销2543与弹性件2542抵接,弹性件2542套设于自锁杆2547上,套筒2545套设于弹性件2542和定位销2543外,套筒2545侧边开设有倒l型孔25451,定位销2543活动设置于倒l型孔25451内,密封盖2546用于封堵套筒2545的下端。当救援平台装置100的载荷增加时,需要调整第一支架210和第二支架220之间的角度以增加升力。同时抬升并转动固定转轴252的两个自锁组件254,解除第二支架220的锁定状态,转动转轴252以调整第一支架210和第二支架220的角度,调整完毕后恢复自锁组件254至初始状态,限制转轴
252的相对位置,以锁定第一支架210和第二支架220的角度。具体地,同时抬升固定转轴252的两个自锁组件254的手轮2544,使定位销2543向上移动,再转动手轮2544,使定位销2543抵接在倒l型孔25451的横向延伸部分,此时转动转轴252调整第一支架210和第二支架220的角度,调整完毕后,转动该两个自锁组件254的手轮2544使定位销2543回到初始位置,此时限位杆2521被另外两个自锁组件254限制在自锁刀件2541的限位槽25411内,从而完成对第一支架210和第二支架220之间角度的限制。
43.本实施例中的固定承载单元110包括四个第一竖杆111、底板112和防护网113,四个第一竖杆111平行竖直设置,第一竖杆111的顶部与第一支架210连接,第一竖杆111的底部连接于底板112,防护网113设置于前面和后面的相邻的两个第一竖杆111之间,以形成救援通道。
44.请结合参考图4,为了能够调整救援通道长度,本实施例中的伸缩通道单元120包括通道框架始端121、通道框架中端122、通道框架尾端123、通道底板124、柔性防护网125、推杆126、传动杆127、第一传动杆128、第二传动杆129、第三传动杆130和电磁组件131,通道框架始端121、通道框架中端122和通道框架尾端123沿固定承载单元110的侧面延伸方向平行设置形成救援通道,通道底板124铺设于通道框架始端121、通道框架中端122和通道框架尾端123之间,通道底板124能够折叠和展开,传动杆127一端与通道框架始端121转动连接,传动杆127的另一端与第一传动杆128转动连接,第一传动杆128的另一端转动连接于通道框架中端122并与第二传动杆129齿轮啮合传动连接,第二传动杆129与第一传动杆128齿轮连接的一端转动连接于通道框架中端122,第二传动杆129的另一端与第三传动杆130转动连接,第三传动杆130的另一端转动连接于通道框架尾端123,推杆126的一端与通道框架始端121转动连接,推杆126的另一端转动连接于传动杆127的中部,推杆126能够伸缩,电磁组件131设置于通道框架中端122,电磁组件131用于控制第二传动杆129和第一传动杆128之间的齿轮啮合,柔性防护网125设置于救援通道的外侧。通过伸长推杆126来推动传动杆127转动,带动第一传动杆128、第二传动杆129和第三传动杆130转动,以使通道框架中端122和通道框架尾端123沿固定承载单元110的侧面方向延伸以调整救援通道长度。在其他实施例中,通道框架中端122可以设置多个,用于延伸成更长的救援通道。
45.进一步地,本实施例中的伸缩通道单元120还包括多个磁吸装置,多个磁吸装置分别设置于通道框架始端121、通道框架中端122、通道框架尾端123相向的侧面上,当救援通道展开时,根据现场情况计算好所需展开通道框架中端122的数量并将相应通道框架中端122上的磁吸装置断电,同时,未展开通道部分的通道框架中端122上的磁吸装置保持通电,确保未展开通道部分保持收紧状态,不会自行随意展开,避免给救援平台装置100带来不稳定因素。
46.本实施例中的通道框架中端122开设有槽型孔,第二传动杆129包括直杆1291、转动轴1292和第二齿轮1293,直杆1291与转动轴1292连接,第二齿轮1293套设于转动轴1292上,转动轴1292穿设于槽型孔,第一传动杆128包括第一齿轮1281,电磁组件131包括固定导轨1311、固定件1312、复位弹簧1313、电磁卡扣1314和电磁吸盘1315,槽型孔经过固定导轨1311的行程,电磁卡扣1314滑动设置于固定导轨1311上,固定件1312和电磁吸盘1315分设于电磁卡扣1314的两侧,复位弹簧1313设置于固定件1312和电磁卡扣1314之间,电磁吸盘1315通电时控制电磁卡扣1314靠近电磁吸盘1315,电磁卡扣1314在固定导轨1311上滑动
时,经过槽型孔,推动转动轴1292向靠近电磁吸盘1315的方向移动,使第二传动杆129的第二齿轮1293与第一传动杆128的第一齿轮1281啮合,从而使第二传动杆129与第一传动杆128之间能够通过齿轮啮合传动。复位弹簧1313在电磁吸盘1315断电时将电磁卡扣1314拉向远离电磁吸盘1315的初始位置,此时第二传动杆129的第二齿轮1293与第一传动杆128的第一齿轮1281处于分离状态,以停止第二传动杆129与第一传动杆128之间的传动。
47.建立救援通道时,为了提升通道的通过性及稳定性,本实施例中的通道底板124还包括支撑组件1240,支撑组件1240设置于通道框架始端121、通道框架中端122以及通道框架尾端123底部,支撑组件1240包括支撑支架、左支撑件1242、右支撑件1243和驱动组件1244,左支撑件1242和右支撑件1243均与支撑支架转动连接,驱动组件1244的输出端与左支撑件1242以及右支撑件1243连接,驱动组件1244用于驱动左支撑件1242和右支撑件1243向外侧转动。通道框架始端121和通道框架中端122之间,通道框架中端122和通道框架尾端123之间均设置可折叠和展开的通道底板124,支撑支架打开后,对通道底板124有支撑作用,进一步提高通道的通过性及稳定性。另外,通道框架尾端123的左支撑件1242和右支撑件1243向外侧转动时,能够扫除救援通道前沿的杂物,以提升救援工作的安全性。
48.请结合参考图5,具体地,驱动组件1244包括第一涡轮12441、第二涡轮12442、第一蜗杆12443、第二蜗杆12444、第一联轴器12445、第二联轴器12446、第一传动轴12447、第二传动轴12448、第一圆柱齿轮12449、第二圆柱齿轮12450和驱动电机12451。驱动电机12451的输出端与第一圆柱齿轮12449连接,第一传动轴12447的一端与第一圆柱齿轮12449连接,第一传动轴12447的另一端通过第一联轴器12445与第一蜗杆12443的一端连接,第一蜗杆12443的另一端与第一涡轮12441啮合传动连接,第一涡轮12441与左支撑件1242连接。第一圆柱齿轮12449与第二圆柱齿轮12450啮合传动连接,第二圆柱齿轮12450与第二传动轴12448的一端连接,第二传动轴12448的另一端通过第二联轴器12446与第二蜗杆12444的一端连接,第二蜗杆12444的另一端与第二涡轮12442啮合传动连接,第二涡轮12442与右支撑杆连接。驱动电机12451用于驱动第一圆柱齿轮12449转动,从而通过传动关系带动左支撑件1242和右支撑件1243转动,对通道底板124有支撑作用,进一步提高通道的通过性及稳定性。另外,设置于通道框架尾端123的支撑组件1240能够实现清除待救援位置杂物的功能。
49.本实施例中的高空救援转移设备还包括图像采集装置300,图像采集装置300与动力提升装置200连接,图像采集装置300与控制单元通讯连接,图像采集装置300用于采集待救援位置及周边图像信息。通过设置图像采集装置300,能够清晰判断待救援位置的事故发生情况,确保救援人员快速掌握现场及周边情况。具体地,本实施例中的图像采集装置300包括多个摄像头,多个摄像头均匀分布在动力提升装置200的侧边,通过整合多个摄像头对现场环境的采集,能够全面掌握现场及周边情况,为救援人员快速、精准决策提供支持。
50.本实施例中的高空救援转移设备还包括距离采集装置400,距离采集装置400与动力提升装置200连接,距离采集装置400与控制单元通讯连接,距离采集装置400用于测量救援平台装置100与待救援位置以及待救援位置与附近建筑间距离。具体地,本实施例中的距离采集装置400包括多个距离传感器,多个距离传感器分布于动力提升装置200的侧边,通过整合多个距离传感器所采集的数据进行分析,能够准确判断高空救援转移设备的位置情况,有利于判断救援平台装置100与待救援位置的距离以及判断伸缩通道单元120需要伸缩的长度,确保在救援时救援平台装置100能够准确释放救援通道至待救援位置。本实施例中
的距离传感器可以采用现有技术中的距离传感器,在此不再赘述。
51.本实施例中的高空救援转移装置还包括电源组件500,电源组件500设置于救援平台装置100底面,以提供动力源。
52.本实施例还提供了一种救援转移方法,采用上述的高空转移设备,救援转移方法包括:
53.通过图像采集装置300采集待救援位置的图像情况,判断事发建筑附近的事故情况,找到适于建立救援转移通道的位置。接着,通过距离采集装置400测量救援平台装置100与待救援位置以及待救援位置与附近建筑间的距离,以判断伸缩通道单元120需要伸缩的长度。具体地,电磁组件131通电使第一传动杆128与第二传动杆129齿轮啮合传动,推杆126伸长推动传动杆127转动,带动第一传动杆128、第二传动杆129和第三传动杆130转动,以使通道框架中端122和通道框架尾端123沿固定承载单元110的侧面方向延伸以调整救援通道长度。其中,若救援通道过长,为了增加升力,旋转转动机构250,使第一支架210和第二支架220成90
°
。最后,快速转移涉险人员及物资到附近安全建筑或安全送达地面。通过上述步骤,能够及时找到建立救援通道的位置并判断出所需的救援通道的长度,快速搭建救援通道,实现快速将涉险人员及物资转移至附近安全建筑或安全送往地面。
54.具体地,在旋转转动机构250,使第一支架210和第二支架220成90
°
后,为了保持第一支架210和第二支架220之间的角度,使限位杆2521卡在自锁组件254的限位槽25411内,以限制第一支架210和第二支架220之间的角度。
55.在救援通道建立后,通过启动驱动组件1244,以驱动左支撑件1242和右支撑件1243向外侧转动,对通道底板124有支撑作用,进一步提高通道的通过性及稳定性。另外,设置于通道框架尾端123的支撑组件1240能够实现清除待救援位置杂物的功能。
56.显然,本发明的上述实施例仅仅是为了清楚说明本发明所作的举例,而并非是对其实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明权利要求的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1