一种无人机尾部多功能平衡杆的制作方法
1.本发明涉及无人机相关领域,具体是一种无人机尾部多功能平衡杆。
背景技术:
2.无人驾驶飞机简称“无人机”,英文缩写为“uav”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全地或间歇地自主地操作,无人机的尾部桨叶在起降过程中,容易因机身的晃动造成意外损坏,此种事故在地面不平整或者大风等恶劣天气下更易发生因此需要在无人机尾部安装一平衡杆来改善无人机的平衡性。
3.现有技术的无人机尾部多功能平衡杆使用时平衡杆与无人机之间的连接较为不便,不使用时将平衡杆从无人机上拆卸下来的操作也较为麻烦,安装和拆卸上的效率较低,对于无人机飞行姿态平稳的调节操作上也较为不便,较为容易发生事故,影响无人机的的工作效率,对于平衡调整上较为浪费时间,延长了操作者的工作时长,增加了工人的劳动强度。
技术实现要素:
4.因此,为了解决上述不足,本发明在此提供一种无人机尾部多功能平衡杆。
5.本发明是这样实现的,构造一种无人机尾部多功能平衡杆,该装置包括固定台和配重块,所述固定台两侧底端均固定有防护罩,所述防护罩内部安装有调节机构,所述调节机构底端设置有配重块,所述调节机构包括第一固定板、平衡螺杆、螺纹套板和导杆,所述防护罩与第一固定板外侧固定连接,所述第一固定板和固定台分别与平衡螺杆两侧转动连接,所述平衡螺杆外表面与螺纹套板螺纹连接,所述螺纹套板与导杆外表面滑动连接,所述导杆两侧分别与第一固定板和固定台固定连接。
6.优选的,所述固定台内部左右两端均设有控制组件,所述控制组件包括支撑板、控制电机、锥齿件、锥齿、转杆、轴承和支撑竖板,所述固定台与支撑板四边固定连接,所述支撑板顶部左右两端均设置有控制电机,所述控制电机底端轴心贯穿支撑板与锥齿件相接,所述锥齿件顶端与支撑板转动连接,所述锥齿件底端外围与锥齿相啮合,所述锥齿中部与转杆相固定,所述转杆内端通过轴承与支撑竖板转动连接,所述支撑竖板上下端分别与支撑板和固定台固定连接,所述转杆外端与平衡螺杆相固定。
7.优选的,所述固定台顶部固定安装有安装组件,所述安装组件包括固定底板、凹槽、固定竖板、固定框、防松动机构、旋钮、螺杆件、滑框、连接块和固定夹件,所述固定台顶部固定有固定底板,所述固定底板顶端中部开设有凹槽,所述固定底板左右两端均固定有固定竖板,所述固定竖板与固定框外围中部固定连接,所述固定框外端设有防松动机构,所述防松动机构外侧顶端设置有旋钮,所述旋钮与螺杆件外端相固定,所述螺杆件左端与固定框转动连接,所述螺杆件与滑框后端中部螺纹连接,所述滑框与固定框内壁滑动连接,所述滑框前端通过连接块与固定夹件相固定。
8.优选的,所述防松动机构包括防护框、棘轮、棘爪、轴杆、控制柄、滑杆、槽孔、连接
杆、第一连接件、弹簧件、第二连接件和第二固定板,所述固定框外端与防护框固定连接,所述螺杆件外端贯穿防护框与旋钮相固定,所述螺杆件外端与防护框转动连接,所述螺杆件与棘轮中部固定连接,所述棘轮外围与棘爪啮合传动,所述棘爪底端中部与轴杆相固定,所述轴杆左右两端与防护框转动连接,所述防护框外端设有控制柄,所述控制柄与滑杆外端固定连接,所述滑杆与槽孔内侧滑动连接,所述滑杆内端与连接杆转动连接,所述连接杆前端与棘爪铰接,所述连接杆通过第一连接件与弹簧件前端顶部相固定,所述弹簧件后端底部通过第二连接件与第二固定板固定连接,所述第二固定板底端与防护框相固定。
9.优选的,所述螺纹套板与配重块之前通过拆装组件进行安装,所述拆装组件包括外框、l型杆、固定件、筒柱、按压件、第一控制板、第二控制板、凸块、弹簧、活动杆、活动板件、固定铰接板和卡接机构,所述螺纹套板前后端底部均固定有l型杆,所述l型杆内端底部与外框相固定,所述外框与固定件外围底端固定连接,所述固定件中部设有筒柱,所述外框和固定件均与按压件外围滑动连接,所述按压件内部两侧底端分别设置有第二控制板和第一控制板,所述按压件内部顶端固定有凸块,所述凸块外围缠绕有弹簧,所述弹簧底端与活动杆相连接,所述活动杆与筒柱内壁滑动连接,所述活动杆内壁与活动板件滑动连接,所述活动板件均与第一控制板和第二控制板内端滑动连接,所述活动板件上下端两侧均与筒柱滑动连接,所述固定件与固定铰接板顶部相固定,所述活动杆底端安装有卡接机构。
10.优选的,所述卡接机构包括第一铰接杆、第二铰接杆、第一交叉连杆、第二交叉连杆、卡接块、安装腔和卡接槽,所述活动杆底端均与第一铰接杆和第二铰接杆铰接,所述第一铰接杆和第二铰接杆外侧分别与第一交叉连杆和第二交叉连杆铰接,所述第一交叉连杆和第二交叉连杆中部与固定铰接板铰接,所述第一交叉连杆和第二交叉连杆底部外端均设有卡接块,且交叉连杆和第二交叉连杆均与卡接块内端铰接,所述配重块顶端中部开设有安装腔,所述安装腔左右两端开设有卡接槽,所述卡接槽内壁与卡接块滑动连接。
11.优选的,所述平衡螺杆与第一固定板通过轴承件转动连接,平衡螺杆与导杆互相平行。
12.优选的,所述转杆与固定台接触部位内端和锥齿件与支撑板接触部位底端均设有限位卡环。
13.优选的,所述螺杆件与固定框接触部位内端和螺杆件内端尾部均固定有防护限位件,且防护限位件表面光滑。
14.优选的,所述固定底板顶端中部的凹槽呈弧形,凹槽顶部和固定夹件内侧均设置有防滑橡胶层。
15.本发明具有如下优点:本发明通过改进在此提供一种无人机尾部多功能平衡杆,与同类型设备相比,具有如下改进:
16.本发明所述一种无人机尾部多功能平衡杆,通过设置了安装组件,在使用前,首先需要将该装置安装至无人机尾部用于安装平衡杆的部位的底部相接触,将底板顶部的凹槽与无人机尾部用于安装平衡杆的部位的底部相接触,顺着棘轮活动方向转动旋钮控制滑框通过连接块带动固定夹件向内侧移动将本设备夹紧固定于无人机安装部位处,使得无人机尾部多功能平衡杆使用时平衡杆与无人机之间的连接较为便利,安装操作上较为便捷,提高了安装效率。
17.本发明所述一种无人机尾部多功能平衡杆,通过设置了安装组件内的防松动机
构,安装完成后,无人机飞行时螺杆件容易产生反向转动导致固定夹件松动,螺杆件会带动在棘轮转动,而棘轮在棘爪的作用下只能进行单向运转,从而抑制螺杆件反向转动只能往夹紧方向进行活动,防止无人机产生的震动导致固定夹件的松动,当需要解除安装时,将控制柄下压控制滑杆通过连接杆带动棘爪向前端转动解除对棘轮的限制,然后反向在转动旋钮控制固定夹件向外侧移动松开对安装部位的夹持固定解除安装,连接杆带动棘爪向前端转动会将弹簧件向前拉伸,松开对控制柄的压制时棘爪会在弹簧的弹力作用下复位对棘轮进行限制,防止设备安装不稳定发生坠落,提高了设备的安装稳定性,操作上也较为便捷,能够有效的防止夹持上的松动,同时拆卸上也较为便利,提高了拆卸效率。
18.本发明所述一种无人机尾部多功能平衡杆,通过设置了拆装组件,当需要对配重块进行替换时,向下按压按压件带动控制第一交叉连杆和第二交叉连杆带动卡接块于安装腔内向内侧移动移出卡接槽解除与卡接槽的卡接即可将配重块拆卸下来,再将替换的配重块与拆装组件进行对接,活动杆于筒柱上向上滑动会与按压件一起对弹簧进行压制,松开按压件,活动杆会在弹力作用下于筒柱上向下活动,活动杆会控制第一交叉连杆和第二交叉连杆带动卡接块于安装腔上向外侧活动卡接入卡接槽内即可对替换的配重块进行固定安装,便于配重块进行安装和拆卸,配重块的替换上较为便捷,方便单独对配重块进行清洁和更换。
19.本发明所述一种无人机尾部多功能平衡杆,通过设置了控制组件,安装完成后,控制电机控制平衡螺杆转动通过与螺纹套板之间的螺纹配合带动螺纹套板进行移动,且螺纹套板沿导杆移动,螺纹套板通过拆装组件带动配重块移动,由于调节机构和控制组件均设置有两组,分别控制两组控制组件的控制电机对两组调节机构底部的配重块进行移动控制,对无人机的平衡性进行调节,使得对于无人机飞行姿态平稳的调节操作上也较为便利,减少了事故的发生率,提高了无人机的的工作效率,节约了平衡调整上的时间,减少了了操作者的工作时长,减轻了工人的劳动强度。
附图说明
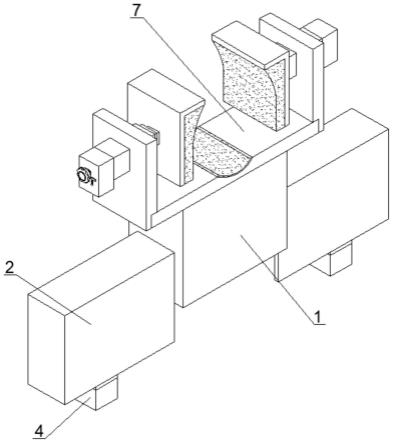
20.图1是本发明结构示意图;
21.图2是本发明的调节机构结构示意图;
22.图3是本发明的控制组件结构示意图;
23.图4是本发明的安装组件结构示意图;
24.图5是本发明的安装组件剖面结构示意图;
25.图6是本发明的防松动机构剖面结构示意图;
26.图7是本发明的拆装组件结构示意图;
27.图8是本发明的拆装组件内部结构示意图;
28.图9是本发明的卡接机构结构示意图。
29.其中:固定台-1、防护罩-2、调节机构-3、配重块-4、拆装组件-5、控制组件-6、安装组件-7、第一固定板-31、平衡螺杆-32、螺纹套板-33、导杆-34、支撑板-61、控制电机-62、锥齿件-63、锥齿-64、转杆-65、轴承-66、支撑竖板-67、固定底板-71、凹槽-72、固定竖板-73、固定框-74、防松动机构-75、旋钮-76、螺杆件-77、滑框-78、连接块-79、固定夹件-710、防护框-751、棘轮-752、棘爪-753、轴杆-754、控制柄-755、滑杆-756、槽孔-757、连接杆-758、第
一连接件-759、弹簧件-7510、第二连接件-7511、第二固定板-7512、外框-51、l型杆-52、固定件-53、筒柱-54、按压件-55、第一控制板-56、第二控制板-57、凸块-58、弹簧-59、活动杆-510、活动板件-511、固定铰接板-512、卡接机构-513、第一铰接杆-5131、第二铰接杆-5132、第一交叉连杆-5133、第二交叉连杆-5134、卡接块-5135、安装腔-5136、卡接槽-5137。
具体实施方式
30.下面将结合附图1-9对本发明进行详细说明,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
31.实施例一;
32.请参阅图1和图2,本发明的一种无人机尾部多功能平衡杆,固定台1和配重块4,固定台1两侧底端均固定有防护罩2,防护罩2内部安装有调节机构3,调节机构3底端设置有配重块4,调节机构3包括第一固定板31、平衡螺杆32、螺纹套板33和导杆34,防护罩2与第一固定板31外侧固定连接,第一固定板31和固定台1分别与平衡螺杆32两侧转动连接,平衡螺杆32转动稳定,平衡螺杆32外表面与螺纹套板33螺纹连接,螺纹套板33与导杆34外表面滑动连接,导杆34两侧分别与第一固定板31和固定台1固定连接,便于螺纹套板33的稳定移动,平衡螺杆32与第一固定板31通过轴承件转动连接,平衡螺杆32转动便利,平衡螺杆32与导杆34互相平行,螺纹套板33活动稳定。
33.请参阅图3,本发明的一种无人机尾部多功能平衡杆,固定台1内部左右两端均设有控制组件6,控制组件6包括支撑板61、控制电机62、锥齿件63、锥齿64、转杆65、轴承66和支撑竖板67,固定台1与支撑板61四边固定连接,固定稳定,支撑板61顶部左右两端均设置有控制电机62,控制电机62底端轴心贯穿支撑板61与锥齿件63相接,可提供动力源,锥齿件63顶端与支撑板61转动连接,锥齿件63转动稳定,锥齿件63底端外围与锥齿64相啮合,锥齿64中部与转杆65相固定,便于控制转杆65的转动,转杆65内端通过轴承66与支撑竖板67转动连接,支撑竖板67上下端分别与支撑板61和固定台1固定连接,便于转杆65的稳定转动,转杆65外端与平衡螺杆32相固定,便于控制平衡螺杆32的转动,转杆65与固定台1接触部位内端和锥齿件63与支撑板61接触部位底端均设有限位卡环,便于转杆65和锥齿件63的稳定转动,防止转杆65和锥齿件63脱位。
34.请参阅图4和图5,本发明的一种无人机尾部多功能平衡杆,固定台1顶部固定安装有安装组件7,安装组件7包括固定底板71、凹槽72、固定竖板73、固定框74、防松动机构75、旋钮76、螺杆件77、滑框78、连接块79和固定夹件710,固定台1顶部固定有固定底板71,固定底板71顶端中部开设有凹槽72,便于与无人机尾部安装部位相契合,固定底板71左右两端均固定有固定竖板73,固定竖板73与固定框74外围中部固定连接,便于固定框74的安装,固定框74外端设有防松动机构75,防松动机构75外侧顶端设置有旋钮76,旋钮76与螺杆件77外端相固定,便于施加转动力,螺杆件77左端与固定框74转动连接,螺杆件77与滑框78后端中部螺纹连接,便于控制滑框78的移动,滑框78与固定框74内壁滑动连接,滑框78外轮廓与固定框74内壁相吻合,便于滑框78的稳定滑动,滑框78前端通过连接块79与固定夹件710相固定,便于控制固定夹件710进行夹持固定,螺杆件77与固定框74接触部位内端和螺杆件77
内端尾部均固定有防护限位件,螺杆件77与固定框74接触部位内端的防护限位件可防止螺杆件77脱位,螺杆件77内端尾部的防护限位件可对滑框78的移动进行限位,防止滑框78脱离螺杆件77,且防护限位件表面光滑,与滑框78接触时防止损坏滑框78,固定底板71顶端中部的凹槽72呈弧形,凹槽72顶部和固定夹件710内侧均设置有防滑橡胶层,固定稳定,防止脱滑。
35.请参阅图6,本发明的一种无人机尾部多功能平衡杆,防松动机构75包括防护框751、棘轮752、棘爪753、轴杆754、控制柄755、滑杆756、槽孔757、连接杆758、第一连接件759、弹簧件7510、第二连接件7511和第二固定板7512,固定框74外端与防护框751固定连接,螺杆件77外端贯穿防护框751与旋钮76相固定,螺杆件77外端与防护框751转动连接,螺杆件77与棘轮752中部固定连接,便于棘轮752对螺杆件77的控制,棘轮752外围与棘爪753啮合传动,便于限制棘轮752的单向活动,便于再棘轮752的配合下对螺杆件77的活动进行限制,棘爪753底端中部与轴杆754相固定,轴杆754左右两端与防护框751转动连接,便于棘爪753的稳定活动,防护框751外端设有控制柄755,控制柄755与滑杆756外端固定连接,便于施加下压力,滑杆756与槽孔757内侧滑动连接,便于滑杆756的活动,同时对滑杆756的活动进行限位,滑杆756内端与连接杆758转动连接,连接杆758前端与棘爪753铰接,便于控制棘爪753向外侧转动,解除棘爪753对棘轮752的限制,连接杆758通过第一连接件759与弹簧件7510前端顶部相固定,弹簧件7510后端底部通过第二连接件7511与第二固定板7512固定连接,第二固定板7512底端与防护框751相固定,便于弹簧件7510的弹力作用对外转的棘爪753进行复位。
36.请参阅图7和图8,本发明的一种无人机尾部多功能平衡杆,螺纹套板33与配重块4之前通过拆装组件5进行安装,拆装组件5包括外框51、l型杆52、固定件53、筒柱54、按压件55、第一控制板56、第二控制板57、凸块58、弹簧59、活动杆510、活动板件511、固定铰接板512和卡接机构513,螺纹套板33前后端底部均固定有l型杆52,l型杆52内端底部与外框51相固定,便于外框51的固定,外框51与固定件53外围底端固定连接,便于固定件53的固定安装,固定件53中部设有筒柱54,外框51和固定件53均与按压件55外围滑动连接,便于按压件55的的活动,按压件55内部两侧底端分别设置有第二控制板57和第一控制板56,按压件55内部顶端固定有凸块58,凸块58外围缠绕有弹簧59,便于弹簧59的固定,弹簧59底端与活动杆510相连接,便于弹簧59施加弹力作用对活动杆510进行复位,活动杆510与筒柱54内壁滑动连接,便于活动杆510的活动,活动杆510内壁与活动板件511滑动连接,便于活动杆510与活动板件511之间的配合,活动板件511均与第一控制板56和第二控制板57内端滑动连接,便于控制活动板件511的活动,活动板件511上下端两侧均与筒柱54滑动连接,便于活动板件511的活动,固定件53与固定铰接板512顶部相固定,活动杆510底端安装有卡接机构513。
37.请参阅图9,本发明的一种无人机尾部多功能平衡杆,卡接机构513包括第一铰接杆5131、第二铰接杆5132、第一交叉连杆5133、第二交叉连杆5134、卡接块5135、安装腔5136和卡接槽5137,活动杆510底端均与第一铰接杆5131和第二铰接杆5132铰接,便于带动第一铰接杆5131和第二铰接杆5132的活动,第一铰接杆5131和第二铰接杆5132外侧分别与第一交叉连杆5133和第二交叉连杆5134铰接,便于控制第一交叉连杆5133和第二交叉连杆5134的活动,第一交叉连杆5133和第二交叉连杆5134中部与固定铰接板512铰接,第一交叉连杆5133和第二交叉连杆5134活动稳定,第一交叉连杆5133和第二交叉连杆5134底部外端均设
有卡接块5135,且交叉连杆5133和第二交叉连杆5134均与卡接块5135内端铰接,便于带动卡接块5135活动,配重块4顶端中部开设有安装腔5136,安装腔5136左右两端开设有卡接槽5137,便于卡接块5135的卡接,配重块4拆装便利,卡接槽5137内壁与卡接块5135滑动连接。
38.实施例二;
39.本发明的一种无人机尾部多功能平衡杆,固定夹件710上的防滑橡胶层内侧顶部呈弧形,便于与无人机尾部安装部位相契合,安装稳定,控制柄755表面和按压件55按压部位均设有防滑层,便于对控制柄755的控制和按压件55的按压,防止滑脱,滑杆756与槽孔757接触部位平滑,便于滑杆756的活动,控制柄755不与旋钮76相接触,防止对产生阻碍,第一铰接杆5131和第二铰接杆5132结构相同,第一交叉连杆5133和第二交叉连杆5134结构相同,第一铰接杆5131和第二交叉连杆5134互相平行,第二铰接杆5132和第一交叉连杆5133互相平,便于第一铰接杆5131、第二铰接杆5132、第一交叉连杆5133和第二交叉连杆5134的活动,第一铰接杆5131、第二铰接杆5132、第一交叉连杆5133和第二交叉连杆5134均不与安装腔5136内壁相接触,防止阻碍第一铰接杆5131、第二铰接杆5132、第一交叉连杆5133和第二交叉连杆5134的活动,筒柱54两侧均设有供活动板件511滑动的滑动槽孔,便于对活动板件511的滑动进行限位,便于活动板件511的活动,活动杆510与筒柱54接触部位顶部设有限位环,对活动杆510进行限位,防止活动杆510脱离活动范围。
40.本发明通过改进提供一种无人机尾部多功能平衡杆,其工作原理如下;
41.第一,在使用前,首先需要将该装置安装至无人机尾部用于安装平衡杆的部位的底部相接触,将底板71顶部的凹槽72与无人机尾部用于安装平衡杆的部位的底部相接触,顺着棘轮752活动方向转动旋钮76带动螺杆件77于防护框751和固定框74上转动,螺杆件77带动滑框78于固定框74上向内侧滑动,滑框78通过连接块79带动固定夹件710向内侧移动将本设备夹紧固定于无人机安装部位处,使得无人机尾部多功能平衡杆使用时平衡杆与无人机之间的连接较为便利,安装操作上较为便捷,提高了安装效率,然后将控制电机62与无人的控制设别进行电连接,机壳完成安装;
42.第二,安装完成后,无人机飞行时螺杆件77容易产生反向转动导致固定夹件710松动,螺杆件77会带动在棘轮752转动,而棘轮752在棘爪753的作用下只能进行单向运转,从而抑制螺杆件77反向转动只能往夹紧方向进行活动,防止无人机产生的震动导致固定夹件710的松动,当需要解除安装时,将控制柄755下压带动滑杆756于槽孔757上向下滑动,滑杆756通过连接杆758带动棘爪753向前端转动解除对棘轮752的限制,然后反向在转动旋钮76控制固定夹件710向外侧移动松开对安装部位的夹持固定解除安装,连接杆758带动棘爪753向前端转动会通过第一连接件759带动弹簧件7510通过第二连接件7511于第二固定板7512上向前拉伸,松开对控制柄755的压制时棘爪753会在弹簧的弹力作用下复位对棘轮752进行限制,防止设备安装不稳定发生坠落,提高了设备的安装稳定性,操作上也较为便捷,能够有效的防止夹持上的松动,同时拆卸上也较为便利,提高了拆卸效率;
43.第三,安装完成后,控制电机62运行带动锥齿件63转动,锥齿件63通过锥齿64带动转杆65转动,转杆65带动平衡螺杆32转动,平衡螺杆32转动通过与螺纹套板33之间的螺纹配合带动螺纹套板33进行移动,且螺纹套板33沿导杆34移动,螺纹套板33通过拆装组件5带动配重块4移动分别对两侧配重块4的位置进行调整,由于调节机构3和控制组件6均设置有两组,分别控制两组控制组件6的控制电机62对两组调节机构3底部的配重块4进行移动控
制,对无人机的平衡性进行调节,使得对于无人机飞行姿态平稳的调节操作上也较为便利,减少了事故的发生率,提高了无人机的的工作效率,节约了平衡调整上的时间,减少了了操作者的工作时长,减轻了工人的劳动强度;
44.第四,当需要对配重块4进行替换时,向下按压按压件55带动第一控制板56和第二控制板57向下活动,第一控制板56和第二控制板57带动活动板件511于筒柱54上向右侧移动,活动板件511带动活动杆510于筒柱54上向上滑动,活动杆510带动第一铰接杆5131和第二铰接杆5132向内侧活动,第一铰接杆5131和第二铰接杆5132带动第一交叉连杆5133和第二交叉连杆5134于固定铰接板512上向内侧活动,第一交叉连杆5133和第二交叉连杆5134带动卡接块5135于安装腔5136内向内侧移动移出卡接槽5137解除与卡接槽5137的卡接即可将配重块4拆卸下来,再将替换的配重块4与拆装组件5进行对接,活动杆510于筒柱54上向上滑动会与按压件55一起对弹簧59进行压制,松开按压件55,活动杆510会在弹力作用下于筒柱54上向下活动,活动杆510会带动第一铰接杆5131、第二铰接杆5132、第一交叉连杆5133和第二交叉连杆5134向外侧活动,第一交叉连杆5133和第二交叉连杆5134会带动卡接块5135于安装腔5136上向外侧活动卡接入卡接槽5137内即可对替换的配重块4进行固定安装,便于配重块4进行安装和拆卸,配重块4的替换上较为便捷,方便单独对配重块4进行清洁和更换。
45.本发明通过改进提供一种无人机尾部多功能平衡杆,通过设置了安装组件,在使用前,首先需要将该装置安装至无人机尾部用于安装平衡杆的部位的底部相接触,将底板71顶部的凹槽72与无人机尾部用于安装平衡杆的部位的底部相接触,顺着棘轮752活动方向转动旋钮76控制滑框78通过连接块79带动固定夹件710向内侧移动将本设备夹紧固定于无人机安装部位处,使得无人机尾部多功能平衡杆使用时平衡杆与无人机之间的连接较为便利,安装操作上较为便捷,提高了安装效率,通过设置了安装组件内的防松动机构,安装完成后,无人机飞行时螺杆件77容易产生反向转动导致固定夹件710松动,螺杆件77会带动在棘轮752转动,而棘轮752在棘爪753的作用下只能进行单向运转,从而抑制螺杆件77反向转动只能往夹紧方向进行活动,防止无人机产生的震动导致固定夹件710的松动,当需要解除安装时,将控制柄755下压控制滑杆756通过连接杆758带动棘爪753向前端转动解除对棘轮752的限制,然后反向在转动旋钮76控制固定夹件710向外侧移动松开对安装部位的夹持固定解除安装,连接杆758带动棘爪753向前端转动会将弹簧件7510向前拉伸,松开对控制柄755的压制时棘爪753会在弹簧的弹力作用下复位对棘轮752进行限制,防止设备安装不稳定发生坠落,提高了设备的安装稳定性,操作上也较为便捷,能够有效的防止夹持上的松动,同时拆卸上也较为便利,提高了拆卸效率,通过设置了拆装组件,当需要对配重块4进行替换时,向下按压按压件55带动控制第一交叉连杆5133和第二交叉连杆5134带动卡接块5135于安装腔5136内向内侧移动移出卡接槽5137解除与卡接槽5137的卡接即可将配重块4拆卸下来,再将替换的配重块4与拆装组件5进行对接,活动杆510于筒柱54上向上滑动会与按压件55一起对弹簧59进行压制,松开按压件55,活动杆510会在弹力作用下于筒柱54上向下活动,活动杆510会控制第一交叉连杆5133和第二交叉连杆5134带动卡接块5135于安装腔5136上向外侧活动卡接入卡接槽5137内即可对替换的配重块4进行固定安装,便于配重块4进行安装和拆卸,配重块4的替换上较为便捷,方便单独对配重块4进行清洁和更换,通过设置了控制组件,安装完成后,控制电机62控制平衡螺杆32转动通过与螺纹套板33之间
的螺纹配合带动螺纹套板33进行移动,且螺纹套板33沿导杆34移动,螺纹套板33通过拆装组件5带动配重块4移动,由于调节机构3和控制组件6均设置有两组,分别控制两组控制组件6的控制电机62对两组调节机构3底部的配重块4进行移动控制,对无人机的平衡性进行调节,使得对于无人机飞行姿态平稳的调节操作上也较为便利,减少了事故的发生率,提高了无人机的的工作效率,节约了平衡调整上的时间,减少了了操作者的工作时长,减轻了工人的劳动强度。
46.以上显示和描述了本发明的基本原理和主要特征和本发明的优点,并且本发明使用到的标准零件均可以从市场上购买,异形件根据说明书的和附图的记载均可以进行订制,各个零件的具体连接方式均采用现有技术中成熟的螺栓铆钉、焊接等常规手段,机械、零件和设备均采用现有技术中,常规的型号,加上电路连接采用现有技术中常规的连接方式,在此不再详述。
47.对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1