一种电动垂直起降载人无人机的制作方法
1.本发明涉及无人机技术领域,特别涉及一种电动垂直起降载人无人机。
背景技术:
2.随着无人机、高速通信、人工智能以及智慧城市的发展,“城市空中交通”概念逐渐兴起,城市空中交通是指通过使用全自动城市无人飞行器提供大型城市内部或都市圈城际间的多种空中飞行服务,城市空中交通将以无人机为核心开拓城市空域资源,将现有地下、地面和高架为载体的2.5d交通拓展为新型3d立体交通方式,城市无人机极大扩展了交通容量,为城市运营瓶颈问题的解决提供了有效方式,未来城市无人机将在城市多个场景发挥巨大作用,如城市运营服务(交通疏导、应急救援等)、商业服务(低空观光、快速物运、冷链运输)以及公共交通服务(载人客运),以城市运营和管理为背景的应用需求,大大催生了对新型无人机的需求。
3.国内旅游业快速发展,随着人民生活水平的不断提高,假期外出观光旅游也越来越多。国内景区多为户外亲近自然(山景、海岛、峡谷、草原)以及城市观光为主,这些景区中低空观光因其非凡的体验也越来越受欢迎,是未来景区旅游发展的重点项目。当下景区的高空体验项目多以通过有人驾驶直升机或者固定翼飞机实现,这些飞机需要配备具有飞行资质的驾驶员。鉴于国内通航飞行驾驶员的紧缺和高额培养成本,飞行员成本居高不下,导致低高空观光体验项目价格高,难以大幅推广。有低空观光需求的景区多在山区、峡谷、市区等,这些地方地形较为复杂,难以建设专业的飞机跑道和足够面积的机场。同时,现有山区、峡谷景区大部分采用索道缆车用于旅游观光客运。然而,索道缆车运行速度慢,旅游旺季特别是黄金周,排队时间长,造成游客大面积滞留,体验感差。
技术实现要素:
4.本发明的目的在于提供一种电动垂直起降载人无人机,旨在解决现有技术中不能实现灵活、快捷、安全的城市空中交通及景区观光的各种需求的技术问题。
5.为了解决上述技术问题,本发明采用的技术方案为:一种电动垂直起降载人无人机,包括机头、机身、机翼及机尾,所述机翼设置在所述机身的左、右两侧,所述机头、机尾分别设于机身沿轴向方向的端部及尾部,所述机身设有载人机舱,所述载人机舱内设有座椅、人机交互控制台、导航系统和飞行控制单元,所述人机交互控制台和所述导航系统均与所述飞行控制单元电连接并用于向飞行控制单元发出飞行命令,所述机翼左、右两侧分别对称安装有第一螺旋桨组、第二螺旋桨组及第三螺旋桨组,所述机尾上设有呈v字型尾翼,所述尾翼上对称安装有第四螺旋桨组,所述飞行控制单元用于控制电机从而带动螺旋桨运动。
6.进一步的,所述第一螺旋桨组安装在机翼左、右两侧端部,所述第一螺旋桨组及第二螺旋桨组位于同一直线上,所述第一螺旋桨组及第四螺旋桨组为倾斜式螺旋桨,所述倾斜式螺旋桨由可倾转电机驱动。
7.进一步的,所述第三螺旋桨组安装在机翼左、右两侧中部,所述第三螺旋桨组分别设有上、下两个桨叶。
8.进一步的,所述第一螺旋桨组及第二螺旋桨组由第一电池模组进行供电,所述第三螺旋桨组、第四螺旋桨组分别由第二电池模组、第三电池模组进行供电,每个单独的电池模组可进行充电或换电。
9.进一步的,所述机翼左、右两侧还设有扰流板,所述机尾上还设有升降舵。
10.进一步的,所述座椅为四个,分两排设于所述载人机舱内。
11.进一步的,所述载人机舱内还设有行李架用于放置行李。
12.进一步的,所述载人机舱下表面设有起落装置,所述起落装置包括减震单元及滚轮。
13.进一步的,所述机头还设有空速管。
14.进一步的,所述载人机舱两侧还设有机舱门,所述机舱门为鸥翼门或剪刀门。
15.本发明的有益效果在于:一种电动垂直起降载人无人机,可用于空中交通、景区观光及替代缆车转运乘客。其机身设有载人机舱,所述载人机舱内设有座椅、人机交互控制台、导航系统和飞行控制单元,为大众提供经济高效的出行方案,无需专业驾驶人员,乘客在人机交互控制台选择目的地附近的固定起降点,即可安心乘坐,采用智能导航系统,航线自主飞行,通过精准定位,安全快捷。机翼左、右两侧分别对称安装有第一螺旋桨组、第二螺旋桨组及第三螺旋桨组,机尾上设有呈v字型尾翼,尾翼上对称安装有第四螺旋桨组,飞行控制单元用于控制电机从而带动螺旋桨运动,独特的动力分布设计,大幅度提高了飞机的全性,在飞行过程中通过分别调整不同驱动装置的转速即可完成各种飞行动作,方便控制,能够在悬停、侧飞和旋转等飞行状态之间顺利切换,机动性能和操控性能好。
附图说明
16.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
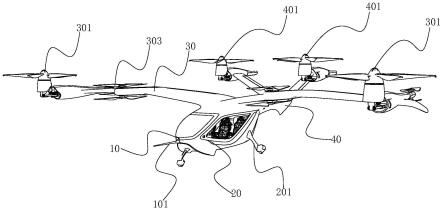
17.图1为本发明一种电动垂直起降载人无人机立体结构示意图;
18.图2为本发明一种电动垂直起降载人无人机垂直飞行时俯视图;
19.图3为本发明一种电动垂直起降载人无人机垂直飞行时立体图;
20.图4为本发明一种电动垂直起降载人无人机水平飞行时立体图;
21.图5为本发明一种电动垂直起降载人无人机机身局部示意图。
22.标号说明:
23.10、机头;101、空速管;20、机身;201、起落装置;
24.202、座椅;203、机舱门;204、行李架;30、机翼;
25.301、第一螺旋桨组;302、第二螺旋桨组;303、第三螺旋桨组;
26.304、扰流板;40、机尾;401、第四螺旋桨组;402、升降舵。
具体实施方式
27.下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
28.在本发明的描述中,需要理解的是,术语“长度”、“宽度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
29.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
30.在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
31.如图1~5所示,本发明实施例提供一种电动垂直起降载人无人机,包括机头10、机身20、机翼30及机尾40,所述机翼30设置在所述机身20的左、右两侧,所述机头10、机尾40分别设于机身沿轴向方向的端部及尾部,所述机身20设有载人机舱,所述载人机舱内设有座椅202、人机交互控制台、导航系统和飞行控制单元,所述人机交互控制台和所述导航系统均与所述飞行控制单元电连接并用于向飞行控制单元发出飞行命令,所述机翼左、右两侧分别对称安装有第一螺旋桨组301、第二螺旋桨组302及第三螺旋桨组303,所述机尾40上设有呈v字型尾翼,所述尾翼上对称安装有第四螺旋桨组401,所述飞行控制单元用于控制电机从而带动螺旋桨运动。其机身设有载人机舱,所述载人机舱内设有座椅、人机交互控制台、导航系统和飞行控制单元,为大众提供经济高效的出行方案,无需专业驾驶人员,乘客在人机交互控制台选择目的地附近的固定起降点,即可安心乘坐,采用智能导航系统,航线自主飞行,通过精准定位,安全快捷。机翼左、右两侧分别对称安装有第一螺旋桨组、第二螺旋桨组及第三螺旋桨组,机尾上设有呈v字型尾翼,尾翼上对称安装有第四螺旋桨组,飞行控制单元用于控制电机从而带动螺旋桨运动,独特的动力分布设计,大幅度提高了飞机的全性,在飞行过程中通过分别调整不同驱动装置的转速即可完成各种飞行动作,方便控制,能够在悬停、侧飞和旋转等飞行状态之间顺利切换,机动性能和操控性能好。
32.进一步的,如图3、图4所示,所述第一螺旋桨组301安装在机翼左、右两侧端部,所述第一螺旋桨组301及第二螺旋桨组302位于同一直线上,所述第一螺旋桨组301及第四螺旋桨组401为倾斜式螺旋桨,所述倾斜式螺旋桨由可倾转电机驱动。可以实现在任何环境下快速垂直起降不受场地的限制,同时可以在不同高度实现悬停以满足城市各种场景下的起降需求,并且通过倾斜式螺旋桨使得无人机在平飞过程中能够获得较大的水平推力,提高飞行速度。当倾斜式螺旋桨处于垂直状态时,飞机可悬停、侧飞、后飞、垂直起降等;当倾斜
式螺旋桨处于水平状态时,飞机即相当于固定翼飞机,能作高速远程飞行。采用倾斜式螺旋桨,将固定翼无人机与多旋翼无人机的优势相结合,一机双模,同时具备多旋翼无人机垂直起降、定点悬停的能力和固定翼无人机高速巡航的能力。
33.进一步的,如图2所示,所述第三螺旋桨组303安装在机翼左、右两侧中部,所述第三螺旋桨组分别设有上、下两个桨叶,大幅度提高了飞机的性能、安全性。
34.进一步的,所述第一螺旋桨组301及第二螺旋桨组302由第一电池模组进行供电,所述第三螺旋桨组303、第四螺旋桨组401分别由第二电池模组、第三电池模组进行供电,每个单独的电池模组可进行充电或换电。电池模组单独为为电机供电,采用无源可拆卸总线允许在正常运行时跨总线共享电流,而不会导致单点故障,冗余高压系统设计,从而提供了最高级别的安全。采用电能提供动力,没有碳氢化合物燃料,零排放,更环保且噪音比直升机安静100倍。在悬停状态下噪音仅65dba,向前飞行时噪音仅40dba。
35.进一步的,如图2所示,所述机翼左、右两侧还设有扰流板304,所述机尾上还设有升降舵402。扰流板用于辅助提供起飞、着陆的增升动力和增加在地面或飞行中的气动阻力,改善飞机的操纵性能。升降舵用于控制尾翼舵面的方向带动机身舱体进行俯冲飞行或仰冲飞行。
36.进一步的,如图5所示,所述座椅为四个,分两排设于所述载人机舱内。能够保证了乘客的视野,使得乘客在无人机内部具有更高的观光体验,并且综合无人机的续航能力,使得无人机整体构紧凑,空间利用率高,占地面积小。
37.进一步的,如图5所示,所述载人机舱内还设有行李架用于放置行李。无人机整体构紧凑,空间利用率高,达到更好的乘客体验。
38.进一步的,如图1及图5所示,所述载人机舱下表面设有起落装置201,所述起落装置包括减震单元及滚轮。支撑整个无人机并用于起飞降落或地面滑行及降落时缓冲,提高乘客舒适度。
39.进一步的,如图1及3所示,所述机头还设有空速管101。用来通过测量气流动压来得出飞机速度。使得无人机整体构紧凑,空间利用率高,占地面积小。
40.进一步的,如图5所述载人机舱两侧还设有机舱门203,所述机舱门为鸥翼门或剪刀门。
41.综上所述,本发明提供的一种电动垂直起降载人无人机可用于空中交通、景区观光及替代缆车转运乘客。其机身设有载人机舱,所述载人机舱内设有座椅、人机交互控制台、导航系统和飞行控制单元,为大众提供经济高效的出行方案,无需专业驾驶人员,乘客在人机交互控制台选择目的地附近的固定起降点,即可安心乘坐,采用智能导航系统,航线自主飞行,通过精准定位,安全快捷。独特的动力分布设计,大幅度提高了飞机安全性,在飞行过程中通过分别调整不同驱动装置的转速即可完成各种飞行动作,方便控制,能够在悬停、侧飞和旋转等飞行状态之间顺利切换,机动性能和操控性能好。整体构紧凑,空间利用率高,占地面积小。采用倾斜式螺旋桨,将固定翼无人机与多旋翼无人机的优势相结合,一机双模,同时具备多旋翼无人机垂直起降、定点悬停的能力和固定翼无人机高速巡航的能力。
42.以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等同变换,或直接或间接运用在相关的技术领域,均同理包括
在本发明的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1