一种无人机共轴机翼同步展开机构的制作方法
1.本发明涉及但不限于无人机技术领域,尤指一种无人机共轴机翼同步展开机构。
背景技术:
2.桶式或箱式折翼无人机具有体积小,便于携带运输,部署灵活等特点,其中机翼展开机构是其关键作动装置。
3.然而,现有无人机机翼展开机构大多采用扭簧、连杆等机构实现展开驱动,但大都同步性差、可靠性差,响应速度慢,占用体积较大。
技术实现要素:
4.本发明的目的为:本发明提供一种无人机共轴机翼同步展开机构,以解决现有无人机机翼展开机构存在同步性差、可靠性差,响应速度慢,占用体积较大、长期储存等的问题。
5.本发明的技术方案为:
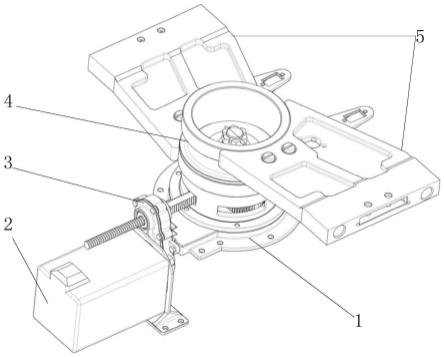
6.本发明实施例提供一种无人机共轴机翼同步展开机构,包括:支撑底座1、电机2、减速齿轮箱3、展开机构组件4,以及机翼连接件5;
7.其中,所述电机2的输出轴连接到减速齿轮箱3的输入齿轮3-5,减速齿轮箱3中滚珠丝杠组件3-2的丝杠连接到展开机构组件4的齿条4-6上;
8.所述展开机构组件4的齿条4-6分别与其内部两套齿轮啮合,且两套齿轮一一对应展开机构组件4中2个嵌套设置的驱动壳体啮合;机翼连接件5安装在2个驱动壳体的端部。
9.可选地,如上所述的无人机共轴机翼同步展开机构中,
10.所述无人机共轴机翼同步展开机构,用于将电机2输出的转动,通过减速齿轮箱3转换为传输到展开机构组件4的齿条4-6上的直线运动,并通过齿条4-6的直线运动带动其内部两套齿轮转动,以驱动2个驱动壳体分别带动与其连接的机翼连接件5转动,从而驱动2套机翼同步旋转展开。
11.可选地,如上所述的无人机共轴机翼同步展开机构中,
12.所述减速齿轮箱3包括:齿轮壳体ⅰ3-1、滚珠丝杠组件3-2、中间齿轮3-3、齿轮壳体ⅱ3-4、输入齿轮3-5;其中,齿轮壳体ⅰ3-1和齿轮壳体ⅱ3-4对盒安装,形成用于安装各齿轮的齿轮腔体,滚珠丝杠组件3-2的一端安装于齿轮腔体上部,位于齿轮腔体内依次啮合的多个中间齿轮3-3的一端与输入齿轮3-5相啮合,另一端与滚珠丝杠组件3-2相啮合,滚珠丝杠组件3-2伸出的丝杠与展开机构组件4的齿条4-6连接。
13.可选地,如上所述的无人机共轴机翼同步展开机构中,
14.所述电机2的输出轴连接到减速齿轮箱3的输入齿轮3-5,通过电机2转动将传递到输入齿轮3-5,通过中间齿轮3-3与滚珠丝杠组件3-2啮合连接结构,将转动转化滚珠丝杠组件3-2中丝杠的直线运动并传递到展开机构组件4的齿条4-6上。
15.可选地,如上所述的无人机共轴机翼同步展开机构中,
16.所述展开机构组件4包括:安装架4-1、内齿圈驱动壳体ⅰ4-2、盖板4-3、内齿圈驱动壳体ⅱ4-4、小齿轮ⅰ4-5、齿条4-6和小齿轮ⅱ4-7;
17.其中,所述内齿圈驱动壳体ⅰ4-2和内齿圈驱动壳体ⅱ4-4均设置为顶端外侧具有凸台的套筒结构,内齿圈驱动壳体ⅱ4-4的中部外侧设置有限位凸环、中部内侧设置有安装凸环,内齿圈驱动壳体ⅰ4-2从底部套设在内齿圈驱动壳体ⅱ4-4的外部,并通过内齿圈驱动壳体ⅱ4-4中部的限位凸环限制内齿圈驱动壳体ⅰ4-2的顶端位置;
18.所述安装架4-1通过内齿圈驱动壳体ⅱ4-4中部的安装凸环安装在壳体内,并通过盖板4-3固定,齿条4-6、小齿轮ⅰ4-5和小齿轮ⅱ4-7均安装在安装架4-1内,齿条4-6分别与小齿轮ⅰ4-5和小齿轮ⅱ4-7啮合,且小齿轮ⅰ4-5与位于外侧的内齿圈驱动壳体ⅰ4-2底端内壁啮合,小齿轮ⅱ4-7与位于内侧的内齿圈驱动壳体ⅱ4-4的内壁啮合。
19.可选地,如上所述的无人机共轴机翼同步展开机构中,
20.所述无人机共轴机翼同步展开机构,具体用于通过滚珠丝杠组件3-2的丝杠与齿条4-6的连接,将电机2的转动转换为齿条4-6的直线运动,通过齿条4-6分别与小齿轮ⅰ4-5和小齿轮ⅱ4-7啮合,将齿条4-6直线运动转换为小齿轮ⅰ4-5和小齿轮ⅱ4-7的齿轮转动,通过小齿轮ⅰ4-5与内齿圈驱动壳体ⅰ4-2的啮合以及小齿轮ⅱ4-7与内齿圈驱动壳体ⅱ4-4的啮合,分别带动内齿圈驱动壳体ⅰ4-2和内齿圈驱动壳体ⅱ4-4同步对称运动。
21.可选地,如上所述的无人机共轴机翼同步展开机构中,
22.所述内齿圈驱动壳体ⅰ4-2与内齿圈驱动壳体ⅱ4-4为共轴相对转动。
23.可选地,如上所述的无人机共轴机翼同步展开机构中,
24.所述机翼连接件5包括机翼连接件ⅰ和机翼连接件ⅱ,一一对应的与内齿圈驱动壳体ⅰ4-2和内齿圈驱动壳体ⅱ4-4固定,并随着内齿圈驱动壳体ⅰ4-2和内齿圈驱动壳体ⅱ4-4转动进行同步转动,机翼连接件ⅰ和机翼连接件ⅱ一一对应的与机翼的左翼和右翼连接,机翼的左翼和右翼为无人机组件。
25.本发明的有益效果为:
26.本发明实施例提供一种无人机共轴机翼同步展开机构,电机2通过减速齿轮箱3驱动丝杠螺母旋转,丝杠螺母推动齿条4-6直线运动,齿条4-6驱动两个齿轮分别顺时针和逆时针旋转,两个齿轮又分别驱动两个内齿圈驱动壳体(对应右翼和左翼)做对称的同轴偏转运转。本发明实施例提供技术方案,采用集中电机驱动、分布式共轴作动驱动机翼同步旋转展开,具有同步性、可靠性好,响应速度快,折叠后占用体积小等特点,比之扭簧或弹簧等被动式驱动,运用平稳,过程可控等。本发明实施例提供的无人机共轴机翼同步展开机构具有以下
27.有益效果:
28.1)集中电机驱动左右翼展开,有效保证机械同步性;
29.2)采用内齿圈驱动壳体ⅰ和内齿圈驱动壳体ⅱ共轴转动,实现左、右翼上下平行折叠,体积更小;
30.3)齿条分别通过小齿轮带到内齿圈驱动壳体,将直线运动同步转化为旋转运动,可以抵消丝杠传递的倾翻力矩,传动平稳,传动效率高,保证了传递精度和可靠性;
31.4)滚珠丝杠组件具有限位功能,限制展开到位角度90度,可以有效抵抗气动载荷传递的外力波动,保证直线运动平稳性;
32.5)通过调整电机正反转实现双向折叠和展开,有利于迅速回收和部署;
33.6)展开角度范围0—90度,展开角度可调可控,分为0度、45度、60度以及90度,通过电机转动圈数开环控制。
附图说明
34.附图用来提供对本发明技术方案的进一步理解,并且构成说明书的一部分,与本技术的实施例一起用于解释本发明的技术方案,并不构成对本发明技术方案的限制。
35.图1为本发明实施例提供的一种无人机共轴机翼同步展开机构的整体结构示意图;
36.图2为图1所示实施例提供的无人机共轴机翼同步展开机构中减速齿轮箱的结构示意图;
37.图3为图1所示实施例提供的无人机共轴机翼同步展开机构中展开机构组件的结构示意图;
38.图4为图1所示实施例提供的无人机共轴机翼同步展开机构中机翼连接件5的结构示意图。
[0039][0040]
1支撑底座、2电机、3减速齿轮箱、4展开机构组件、5机翼连接件,减速齿轮箱3包括:3-1齿轮壳体ⅰ、3-2滚珠丝杠组件、3-3中间齿轮、3-4齿轮壳体ⅱ、3-5输入齿轮,4展开机构组件包括:4-1安装架、4-2内齿圈驱动壳体ⅰ、4-3盖板、4-4内齿圈驱动壳体ⅱ、4-5小齿轮ⅰ、4-6齿条、4-7小齿轮ⅱ。
具体实施方式:
[0041]
为使本发明的目的、技术方案和优点更加清楚明白,下文中将结合附图对本发明的实施例进行详细说明。需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互任意组合。
[0042]
上述背景技术中已经说明,现有无人机机翼展开机构大多采用扭簧、连杆等机构实现展开驱动,但大都同步性差、可靠性差,响应速度慢,占用体积较大。现有无人机机翼展开机构的结构如下举例:
[0043]
专利cn209479954u和cn212500997u采用燃气作动筒驱动连杆机构实现展开功能,响应速度快,但机翼和机构结构需要较强的强度来解决燃气作动筒冲击问题,可靠性差,机构重量较大。专利cn214648993u采用曲柄摇杆机构展开,占据空间较大,储存及维护不方便。专利cn110871886a采用丝杠直线作动驱动机翼伸缩,专利206327561u采用直线动力机构实现直线和旋转,运动过程较为平稳可靠,抗外界载荷扰动能力较差。专利cn112550666a通过拉簧带动机构沿导轨方向运动,但拉簧在长期拉压状态,拉簧的寿命和特性变差,运动可靠性差,不适合长期储运的场景;同样专利cn113148111a、cn211076312u、cn112849400a、cn207417122u、专利cn210707855u以及cn109367760a通过预压的扭簧或者压缩弹簧驱动转轴使机翼展开。专利cn207417115u通过电机带动连杆转动,双齿轮配合对非共轴的双翼进行限位,但此机翼非共轴,折叠体积较大。专利cn210526835u通过电机驱动丝杠螺母机构驱动连杆连接机翼展开。
[0044]
为解决现有无人机机翼展开机构存在同步性差、可靠性差,响应速度慢,占用体积较大、长期储存等问题,本发明实施例提供一种无人机共轴机翼同步展开机构,基本原理是电机通过直齿减速驱动丝杠螺母旋转,丝杠螺母推动齿条直线运动,齿条驱动两个齿轮分别顺时针和逆时针旋转,两个齿轮又分别驱动两个内齿圈驱动壳体(分别对应右翼和左翼)做对称的同轴偏转运转。
[0045]
本发明提供以下几个具体的实施例可以相互结合,对于相同或相似的概念或过程可能在某些实施例不再赘述。
[0046]
图1为本发明实施例提供的一种无人机共轴机翼同步展开机构的整体结构示意图,图2为图1所示实施例提供的无人机共轴机翼同步展开机构中减速齿轮箱的结构示意图;图3为图1所示实施例提供的无人机共轴机翼同步展开机构中展开机构组件的结构示意图。本发明实施例提供的无人机共轴机翼同步展开机构的主要结构包括:支撑底座1、电机2、减速齿轮箱3、展开机构组件4,以及机翼连接件5。
[0047]
参照图1到图3所示,无人机共轴机翼同步展开机构的结构中,所述电机2的输出轴连接到减速齿轮箱3的输入齿轮3-5,减速齿轮箱3中滚珠丝杠组件3-2的丝杠连接到展开机构组件4的齿条4-6上。
[0048]
本发明实施例中展开机构组件4的齿条4-6分别与其内部两套齿轮啮合,且两套齿轮一一对应展开机构组件4中2个嵌套设置的驱动壳体啮合;机翼连接件5安装在2个驱动壳体的端部。
[0049]
基于上述无人机共轴机翼同步展开机构的基本结构,该无人机共轴机翼同步展开机构的工作原理为:
[0050]
将电机2输出的转动,通过减速齿轮箱3转换为传输到展开机构组件4的齿条4-6上的直线运动,并通过齿条4-6的直线运动带动其内部两套齿轮转动,以驱动2个驱动壳体分别带动与其连接的机翼连接件5转动,从而驱动2套机翼同步旋转展开。
[0051]
如图2所示减速齿轮箱3的具体结构,其包括:齿轮壳体ⅰ3-1、滚珠丝杠组件3-2、中间齿轮3-3、齿轮壳体ⅱ3-4、输入齿轮3-5;其中,齿轮壳体ⅰ3-1和齿轮壳体ⅱ3-4对盒安装,形成用于安装各齿轮的齿轮腔体,滚珠丝杠组件3-2的一端安装于齿轮腔体上部,位于齿轮腔体内依次啮合的多个中间齿轮3-3的一端与输入齿轮3-5相啮合,另一端与滚珠丝杠组件3-2相啮合,滚珠丝杠组件3-2伸出的丝杠与展开机构组件4的齿条4-6连接。
[0052]
由于电机2的输出轴连接到减速齿轮箱3的输入齿轮3-5,通过电机2转动将传递到输入齿轮3-5,通过中间齿轮3-3与滚珠丝杠组件3-2啮合连接结构,将转动转化滚珠丝杠组件3-2中丝杠的直线运动并传递到展开机构组件4的齿条4-6上。
[0053]
如图3所示展开机构组件4的具体结构,其包括:安装架4-1、内齿圈驱动壳体ⅰ4-2、盖板4-3、内齿圈驱动壳体ⅱ4-4、小齿轮ⅰ4-5、齿条4-6和小齿轮ⅱ4-7。
[0054]
图3所示展开机构组件4的结构中,内齿圈驱动壳体ⅰ4-2和内齿圈驱动壳体ⅱ4-4均设置为顶端外侧具有凸台的套筒结构,内齿圈驱动壳体ⅱ4-4的中部外侧设置有限位凸环、中部内侧设置有安装凸环,内齿圈驱动壳体ⅰ4-2从底部套设在内齿圈驱动壳体ⅱ4-4的外部,并通过内齿圈驱动壳体ⅱ4-4中部的限位凸环限制内齿圈驱动壳体ⅰ4-2的顶端位置。
[0055]
该展开机构组件4中,安装架4-1通过内齿圈驱动壳体ⅱ4-4中部的安装凸环安装在壳体内,并通过盖板4-3固定,齿条4-6、小齿轮ⅰ4-5和小齿轮ⅱ4-7均安装在安装架4-1
内,齿条4-6分别与小齿轮ⅰ4-5和小齿轮ⅱ4-7啮合,且小齿轮ⅰ4-5与位于外侧的内齿圈驱动壳体ⅰ4-2底端内壁啮合,小齿轮ⅱ4-7与位于内侧的内齿圈驱动壳体ⅱ4-4的内壁啮合。
[0056]
基于上述展开机构组件4的具体结构,无人机共轴机翼同步展开机构,通过滚珠丝杠组件3-2的丝杠与齿条4-6的连接,将电机2的转动转换为齿条4-6的直线运动,通过齿条4-6分别与小齿轮ⅰ4-5和小齿轮ⅱ4-7啮合,将齿条4-6直线运动转换为小齿轮ⅰ4-5和小齿轮ⅱ4-7的齿轮转动,通过小齿轮ⅰ4-5与内齿圈驱动壳体ⅰ4-2的啮合以及小齿轮ⅱ4-7与内齿圈驱动壳体ⅱ4-4的啮合,分别带动内齿圈驱动壳体ⅰ4-2和内齿圈驱动壳体ⅱ4-4同步对称运动。
[0057]
需要说明的是,基于展开机构组件4的结构配置,内齿圈驱动壳体ⅰ4-2与内齿圈驱动壳体ⅱ4-4为共轴相对转动。
[0058]
如图4所示机翼连接件5的具体结构,其包括机翼连接件ⅰ和机翼连接件ⅱ,一一对应的与内齿圈驱动壳体ⅰ4-2和内齿圈驱动壳体ⅱ4-4固定,并随着内齿圈驱动壳体ⅰ4-2和内齿圈驱动壳体ⅱ4-4转动进行同步转动,机翼连接件ⅰ和机翼连接件ⅱ一一对应的与机翼的左翼和右翼连接,机翼的左翼和右翼为无人机组件。
[0059]
另外,需要说明的是,本发明实施例中支撑底座1用于减速齿轮箱3、展开机构组件4的固定和支撑,保证减速齿轮箱3、展开机构组件4之间以及内部组件之间的位置关系,有效保证传动精度和稳定。电机2位主动驱动装置。
[0060]
本发明实施例提供的无人机共轴机翼同步展开机构,电机2通过减速齿轮箱3驱动丝杠螺母旋转,丝杠螺母推动齿条4-6直线运动,齿条4-6驱动两个齿轮分别顺时针和逆时针旋转,两个齿轮又分别驱动两个内齿圈驱动壳体(对应右翼和左翼)做对称的同轴偏转运转。本发明实施例提供技术方案,采用集中电机驱动、分布式共轴作动驱动机翼同步旋转展开,具有同步性、可靠性好,响应速度快,折叠后占用体积小等特点,比之扭簧或弹簧等被动式驱动,运用平稳,过程可控等。本发明实施例提供的无人机共轴机翼同步展开机构具有以下
[0061]
有益效果:
[0062]
1)集中电机驱动左右翼展开,有效保证机械同步性;
[0063]
2)采用内齿圈驱动壳体ⅰ和内齿圈驱动壳体ⅱ共轴转动,实现左、右翼上下平行折叠,体积更小;
[0064]
3)齿条分别通过小齿轮带到内齿圈驱动壳体,将直线运动同步转化为旋转运动,可以抵消丝杠传递的倾翻力矩,传动平稳,传动效率高,保证了传递精度和可靠性;
[0065]
4)滚珠丝杠组件具有限位功能,限制展开到位角度90度,可以有效抵抗气动载荷传递的外力波动,保证直线运动平稳性;
[0066]
5)通过调整电机正反转实现双向折叠和展开,有利于迅速回收和部署;
[0067]
6)展开角度范围0—90度,展开角度可调可控,分为0度、45度、60度以及90度,通过电机转动圈数开环控制。
[0068]
本发明上述实施例提供的无人机共轴机翼同步展开机构的工作方式如下说明:
[0069]
(一)收起功能:
[0070]
无人机共轴机翼同步展开机构从展开状态实现完成折叠状态,电机2逆时针旋转,通过输入齿轮3-5和中间齿轮3-3将旋转运动传递给滚珠丝杠组件3-2,滚珠丝杠组件3-2将
旋转运动转化为直线运动,滚珠丝杠组件3-2的丝杠推动齿条4-6直线运动,齿条4-6分别与小齿轮ⅰ4-5和小齿轮ⅱ4-7啮合,即驱动小齿轮ⅰ4-5和小齿轮ⅱ4-7分别做逆时针和顺时针旋转,小齿轮ⅰ4-5和小齿轮ⅱ4-7分别驱动内齿圈驱动壳体ⅰ4-2和内齿圈驱动壳体ⅱ4-4做对称的同轴偏转运转,实现收起功能。
[0071]
(二)展开功能:
[0072]
无人机共轴机翼同步展开机构从折叠状态实现完成展开状态,电机2顺时针旋转,通过输入齿轮3-5和中间齿轮3-3将旋转运动传递给滚珠丝杠组件3-2,滚珠丝杠组件3-2将旋转运动转化为直线运动,滚珠丝杠组件3-2的丝杠拉动齿条4-6直线运动,齿条4-6分别与小齿轮ⅰ4-5和小齿轮ⅱ4-7啮合,即驱动小齿轮ⅰ4-5和小齿轮ⅱ4-7分别做顺时针和逆时针旋转,小齿轮ⅰ4-5和小齿轮ⅱ4-7分别驱动内齿圈驱动壳体ⅰ4-2和内齿圈驱动壳体ⅱ4-4做对称的同轴偏转运转,实现展开功能。
[0073]
虽然本发明所揭露的实施方式如上,但所述的内容仅为便于理解本发明而采用的实施方式,并非用以限定本发明。任何本发明所属领域内的技术人员,在不脱离本发明所揭露的精神和范围的前提下,可以在实施的形式及细节上进行任何的修改与变化,但本发明的专利保护范围,仍须以所附的权利要求书所界定的范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1