一种无人机农药精准喷施系统的制作方法
1.本发明涉及植保无人机技术领域,具体而言,涉及一种无人机农药精准喷施系统。
背景技术:
2.农药精准使用技术是利用现代农林生产工艺和先进技术,设计在自然环境中基于实时视觉传感或基于地图的农药精准施用方法。该方法涵盖施药过程中的目标信息采集、目标识别、施药决策、可变量喷雾执行等农药精准使用的主要技术要点,以节约农药、提高农药使用效率和减轻环境污染,改善中国农林病虫草害防治中的施药工艺和施药器械,实现中国农林病虫草害防治的农药使用技术的智能化、精准化和自动化,促进生态环境保护和农林生产的可持续发展。简而言之,农药精准使用技术就是要实现定时、定量和定点施药。
3.现有技术公开号为cn214608091u公开了一种无人机用于林业精准施药的装置,包括机体和四个扇叶,所述机体的下方设置有四个弹性管,且四个弹性管分别位于四个扇叶正下方,所述弹性管的底端环形阵列有多个喷嘴,且弹性管的底端内部嵌设有环管,环管和喷嘴之间均连通设置,所述环管通过管道和机体中的药箱之间连通设置。本方案,通过在机体扇叶的下方位置处设置弹性管,且弹性管的底端环形阵列设置喷嘴,气流穿过弹性管时和喷嘴喷出的药液之间接触,携带其向下运动,由于扇叶下的气流流速大于外部气流流速,从而保证药液喷洒位置的精准性,由于弹性管具有弹性,在降落时可以代替支腿,完成降落时的缓震操作;
4.但是现有技术仍具有一定的局限性,现有的农药一般采用药粉和水溶液进行配置,无人机喷药装置长期使用过程中,药粉沉淀容易附着在装置的内壁,不仅影响农药的充分利用,沉淀还容易导致喷嘴堵塞;同时,无人机在喷药农田内飞行过程中匀速喷撒药液时,飞行速度越快,总喷洒时间越短,容易导致施药量不足,难以对病虫害起到显著抑制效果,影响作物的生产,而飞行速度越慢,喷洒所需时间更长,容易导致施药量过多,会加重作物耐药负担,不利于作物生长,会降低农产品的品质。
5.如何发明一种无人机农药精准喷施系统来改善这些问题,成为了本领域技术人员亟待解决的问题。
技术实现要素:
6.为了弥补以上不足,本发明提供了一种无人机农药精准喷施系统,旨在改善现有技术无人机喷施农药时农药容易沉淀的问题。
7.本发明是这样实现的:
8.本发明提供一种无人机农药精准喷施系统,包括植保无人机和喷药系统,植保无人机的底部固定安装有智能喷药箱和信息采集摄像头,还包括:
9.流量调节系统,用于根据植保无人机的飞行速度调节农药流量大小,提高施药的均匀性;
10.分配系统,用于对喷施的多种农药进行混合,同时对药液进行搅拌,提高药液喷施的均匀性和保证药液溶解效果;
11.气驱系统,通过植保无人机飞行时产生的风力驱动系统运作,同时可以将气流排出,防止植保无人机飞行轨迹后方出现负压,保证药液喷施的均匀性。
12.优选地,智能喷药箱的内部上方开设有多组储药舱,智能喷药箱的内部还固定安装有压力泵机,压力泵机和储药舱之间通过管道相连通,储药舱与压力泵机相连通的管道内设置有电磁阀。
13.优选地,流量调节系统包括转动连杆,转动连杆与智能喷药箱的内部保持转动连接,转动连杆的顶部与压力泵机的输出口相连通,转动连杆的顶部开设有出液槽,转动连杆的内侧壁活动限位套接有多组环形分布的封堵滑块,封堵滑块与转动连杆之间还固定安装有压缩弹簧。
14.优选地,分配系统包括圆形密封槽,转动连杆的外侧壁固定安装有多组环形分布的从动叶片,转动连杆的侧壁还开设有多组导流槽,导流槽的两端分别与圆形密封槽的内腔和出液槽的内腔相连通,从动叶片的表面开设有流通孔,流通孔的内部通过固定架和轴承转动连接有多组环形分布的混合叶片。
15.优选地,从动叶片呈弧形设置,且流通孔设置于从动叶片的弧形弯曲处,从动叶片和圆形密封槽的内侧壁相贴合,从动叶片的底部设置有倒斜角。
16.优选地,智能喷药箱的侧壁对称开设有喷药口,且喷药口与圆形密封槽的内部相连通。
17.优选地,气驱系统包括圆形滑槽,圆形滑槽开设于智能喷药箱的内部,位于分配系统的下方,且转动连杆贯穿通过圆形滑槽,转动连杆的外侧壁固定安装有驱动叶片,驱动叶片与圆形滑槽的内侧壁相贴合。
18.优选地,智能喷药箱的侧面开设有进气口,进气口与圆形滑槽的内部相连通,且进气口的内侧壁设置有朝向圆形滑槽方向入口的倒斜角,智能喷药箱的远离进气口的另一侧设置有多组均匀分布喷气口,喷气口与圆形滑槽的内部相连通。
19.优选地,驱动叶片做弧形设置。
20.优选地,喷药系统包括:
21.信息采集模块,用于对农田虫害信息进行采集和分析;
22.农药出药模块,通过对不同虫害范围分析,利用电磁阀配置出药比例;
23.农药混合模块,通过分配系统的搅拌混合,使分配后农药充分混合,进入喷药口的内部;
24.农药喷施模块,通过喷药口将农药喷出作用于农田。
25.本发明的有益效果是:
26.药液进入圆形密封槽后,通过从动叶片和混合叶片的转动可以对流经的药液进行搅动,实现对药液中的药粉沉淀进行混合搅拌,有效除去沉淀,保证了药液的充分溶解,保证了药液的作用效果和农药的充分利用,进一步提高了喷施效果,避免出现浪费,也避免沉淀进入喷药口导致堵塞;
27.在植保无人机飞行时实现了通过根据植保无人机的不同飞行速度产生的气流控制转动连杆的转速,进而通过转动连杆转动产生的离心力实现对封堵滑块的压缩,进而实
现了根据植保无人机的飞行速度自动调节喷药的流量大小,实现了对农田均匀喷施效果,在保证喷施用药效果的同时避免药液浪费;
28.气流经由进气口进入,对整体进行驱动,同时驱动后的气流从多组喷气口喷出,可以对植保无人机飞行的负压区进行填补,避免药雾集中,保证了药雾的扩散和喷施效果。
附图说明
29.为了更清楚地说明本发明实施方式的技术方案,下面将对实施方式中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本发明的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
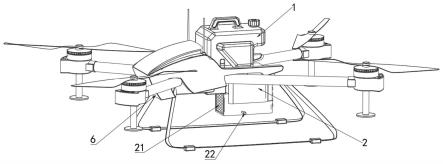
30.图1是本发明实施方式提供的一种无人机农药精准喷施系统的5植保无人机整体结构示意图;
31.图2是本发明实施方式提供的一种无人机农药精准喷施系统的整体结构示意图;
32.图3是本发明实施方式提供的一种无人机农药精准喷施系统的内部结构示意图;
33.图4是本发明实施方式提供的一种无人机农药精准喷施系统的内部整体结构示意图;
34.图5是本发明实施方式提供的一种无人机农药精准喷施系统的流量调节系统整体结构示意图;
35.图6是本发明实施方式提供的一种无人机农药精准喷施系统的5流量调节系统流通截面变大时的整体状态示意图;
36.图7是本发明实施方式提供的一种无人机农药精准喷施系统的分配系统结构示意图;
37.图8是本发明实施方式提供的一种无人机农药精准喷施系统的流通孔内部结构示意图;
38.图9是本发明实施方式提供的一种无人机农药精准喷施系统的气驱系统内部结构示意图;
39.图10是本发明实施方式提供的一种无人机农药精准喷施系统飞行时存在负压区时药雾流动状态示意图;
40.图11是本发明实施方式提供的一种无人机农药精准喷施系统飞行时喷气口消除负压后药雾流动状态示意图;
41.图12是本发明实施方式提供的一种无人机农药精准喷施系统示意图。
42.图中:1、植保无人机;2、智能喷药箱;3、流量调节系统;4、分配系统;5、气驱系统;6、信息采集摄像头;21、进气口;22、喷药口;23、储药舱;24、压力泵机;25、喷气口;26、电磁阀;31、转动连杆;32、出液槽;33、封堵滑块;34、压缩弹簧;41、从动叶片;42、导流槽;43、流通孔;44、混合叶片;45、圆形密封槽;51、驱动叶片;52、圆形滑槽。
具体实施方式
43.为使本发明实施方式的目的、技术方案和优点更加清楚,下面将结合本发明实施方式中的附图,对本发明实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实
施方式是本发明一部分实施方式,而不是全部的实施方式。基于本发明中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本发明保护的范围。
44.实施例
45.参照图1-11,一种无人机农药精准喷施系统,包括植保无人机1和喷药系统,植保无人机1的底部固定安装有智能喷药箱2和信息采集摄像头6,还包括:
46.流量调节系统3,用于根据植保无人机1的飞行速度调节农药流量大小,提高施药的均匀性;
47.分配系统4,用于对喷施的多种农药进行混合,同时对药液进行搅拌,提高药液喷施的均匀性和保证药液溶解效果;
48.气驱系统5,通过植保无人机1飞行时产生的风力驱动系统运作,同时可以将气流排出,防止植保无人机1飞行轨迹后方出现负压,保证药液喷施的均匀性。
49.参照图2-3,进一步地,智能喷药箱2的内部上方开设有多组储药舱23,智能喷药箱2的内部还固定安装有压力泵机24,压力泵机24和储药舱23之间通过管道相连通,储药舱23与压力泵机24相连通的管道内设置有电磁阀26。
50.参照图3-6,流量调节系统3包括转动连杆31,转动连杆31与智能喷药箱2的内部保持转动连接,转动连杆31的顶部与压力泵机24的输出口相连通,转动连杆31的顶部开设有出液槽32,转动连杆31的内侧壁活动限位套接有多组环形分布的封堵滑块33,封堵滑块33与转动连杆31之间还固定安装有压缩弹簧34。
51.参照图7-8,分配系统4包括圆形密封槽45,转动连杆31的外侧壁固定安装有多组环形分布的从动叶片41,转动连杆31的侧壁还开设有多组导流槽42,导流槽42的两端分别与圆形密封槽45的内腔和出液槽32的内腔相连通,从动叶片41的表面开设有流通孔43,流通孔43的内部通过固定架和轴承转动连接有多组环形分布的混合叶片44。
52.进一步地,从动叶片41呈弧形设置,且流通孔43设置于从动叶片41的弧形弯曲处,从动叶片41和圆形密封槽45的内侧壁相贴合,从动叶片41的底部设置有倒斜角。
53.更进一步地,智能喷药箱2的侧壁对称开设有喷药口22,且喷药口22与圆形密封槽45的内部相连通。
54.参照图9,气驱系统5包括圆形滑槽52,圆形滑槽52开设于智能喷药箱2的内部,位于分配系统4的下方,且转动连杆31贯穿通过圆形滑槽52,转动连杆31的外侧壁固定安装有驱动叶片51,驱动叶片51与圆形滑槽52的内侧壁相贴合。
55.进一步地,智能喷药箱2的侧面开设有进气口21,进气口21与圆形滑槽52的内部相连通,且进气口21的内侧壁设置有朝向圆形滑槽52方向入口的倒斜角,智能喷药箱2的远离进气口21的另一侧设置有多组均匀分布喷气口25,喷气口25与圆形滑槽52的内部相连通。
56.需要说明的是,驱动叶片51做弧形设置;
57.具体的,通过驱动叶片51的弧形设计,可以使风力推动驱动叶片51保持顺时针旋转,以保证从动叶片41的转动方向,便于从动叶片41转动时通过从动叶片41的弧形边将药液朝远离转动连杆31的方向推动至喷药口22喷出。
58.参照图12,喷药系统包括:
59.信息采集模块,用于对农田虫害信息进行采集和分析;
60.农药出药模块,通过对不同虫害范围分析,利用电磁阀26配置出药比例;
61.农药混合模块,通过分配系统4的搅拌混合,使分配后农药充分混合,进入喷药口22的内部;
62.农药喷施模块,通过喷药口22将农药喷出作用于农田;
63.需要说明的是,植保无人机1的内部设置有控制中心,控制中心与信息采集摄像头6和电磁阀26电性连接,以棉花种植为例,在棉花的花铃期,容易出现棉花枯、黄萎病、棉花烂铃等土传病害或者病菌病害,植保无人机1飞行时通过信息采集摄像头6采集飞行前方的农田虫害信息,由于棉花枯萎病和烂铃病害等不同病害特征存在视觉区别,因此通过信息采集摄像头6拍摄采集后,将信息传递至控制中心,控制中心可以通过比对,进而识别植保无人机1飞行轨迹前方农田区域的枯萎病和烂铃病比例占农田区域的分布比例,进一步,通过控制中心控制不同组储药舱23配备的电磁阀26开启不同范围大小,储药舱23沿环形设置有多组,第一组储药舱23内设置有针对枯萎病的络氨铜、乙蒜素、三氯异氰脲酸或过氧水等成份的杀菌剂,第二组储药舱23的内部则配备有针对烂铃病的多菌灵、甲霜灵锰锌、百菌清溶液,第三组储药舱23内则配备有稀释用水溶液,通过控制不同组电磁阀26的流量大小,飞行轨迹前方农田区域的枯萎病和烂铃病区域范围占比越高,则相对应的该组电磁阀26开启范围流量越大,与水溶液相比配的电磁阀26开启流量越小。
64.该一种无人机农药精准喷施系统的工作原理:
65.首先,控制植保无人机1沿农田飞行,通过信息采集摄像头6采集飞行前方的农田虫害信息,控制中心可以通过比对后,针对病虫害的比例不同控制不同组储药舱23配备的电磁阀26控制流出的流量大小,实现针对不同比例的病虫害配备不同比例和浓度的农药,实现精准施喷;
66.进气口21的开口朝向植保无人机1的飞行方向,在植保无人机1的飞行过程中,气流经由进气口21进入圆形滑槽52的内部,通过驱动叶片51的弧形设计和驱动叶片51的贴合密封设计,可以推动驱动叶片51带动转动连杆31顺时针旋转,植保无人机1的飞行速度越快,进入进气口21的气流越大,转动连杆31转速越快,同时,配置的农药溶液经由压力泵机24泵出至出液槽32的内部,并通过出液槽32和导流槽42流入圆形密封槽45的内部,当转动连杆31转动时,封堵滑块33在转动产生的离心力的作用下朝贴近压缩弹簧34的方向运动对压缩弹簧34压缩,此时,脱离封堵滑块33的封堵,出液槽32的截面流通面积更大,因此,流经出液槽32和导流槽42进入圆形密封槽45内部的药液流量更大,当转动连杆31转速越快,封堵滑块33对压缩弹簧34的压缩幅度越大,出液槽32的流通横截面积越大,实现了根据植保无人机1的飞行速度自动调节流量大小,实现了对农田均匀喷施效果,在保证喷施效果的同时避免浪费;
67.而当药液通过导流槽42进入圆形密封槽45后,通过转动连杆31的转动,从动叶片41转动,对圆形密封槽45内部的溶液进行混合搅拌,使各组储药舱23内配置的药液实现充分混合后再经由两侧喷药口22喷出,使喷施区域均匀受药,避免药液进入圆形密封槽45后直接从其中一侧喷药口22喷出,导致两侧喷药口22喷施的药液浓度成分不同,导致喷施区域受药不均匀,影响喷施结果;
68.同时,当从动叶片41转动推动圆形密封槽45内部药液混合时,从动叶片41与圆形密封槽45的贴合设计,可以在转动时对圆形密封槽45内侧壁附着的药粉沉淀物进行刮除清
理,同时通过从动叶片41的斜角设计,可以将圆形密封槽45底部沉淀的药粉刮除并随着从动叶片41的倾斜面带动上升,药液带着药粉沉淀物顺着从动叶片41的弧形面运动经过流通孔43时会从流通孔43内部流过,且当药液流过流通孔43时与混合叶片44相接触时,流动的药液可以带动混合叶片44转动,通过混合叶片44的转动可以对流经的药液实现进一步搅动,实现对药液中的药粉沉淀进行进一步混合搅拌,有效除去沉淀,保证了药液的充分溶解,保证了药液的作用效果和农药的充分利用,进一步提高了喷施效果,避免出现浪费,也避免沉淀进入喷药口22导致堵塞;
69.于此同时,推动驱动叶片51转动的气流经过圆形滑槽52后通过喷气口25从植保无人机1的飞行后方排出,参照图10-11,在现有的植保无人机1飞行时,气流经过植保无人机1的两侧时会形成涡流,使得植保无人机1的后方出现负压区,会使得两侧喷药口22喷出的药雾被负压区吸引,使得药雾喷施流动轨迹朝负压区集中,使得喷出的药雾难以扩散,降低了药雾的喷施效果,而当进气口21收集的气流从多组喷气口25喷出时,喷出气流可以有效对负压区进行填补,避免药雾集中,保证了药雾的扩散和喷施效果。
70.以上所述仅为本发明的优选实施方式而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1