一种无人驾驶环卫设备的制作方法
本发明涉及现代环卫设备,具体而言,涉及一种无人驾5驶环卫设备。
背景技术:
1、目前,对于建筑物外墙体、公交站台雨棚等都是采用人工清洁,不仅工作强度大,而且具有一定的危险性,同时对人力的需求还非常大,这导致针对这类建筑、设施的清洁工作的成本非常高。
2、0有鉴于此,特提出本申请。
技术实现思路
1、本发明的目的在于提供一种无人驾驶环卫设备,其能够大大提高对建筑物外墙体、公交站台雨棚的清洁效率,同时降低对人工的需求度,在降低危险性的同时还降低了人工成本。
2、5本发明的实施例是这样实现的:
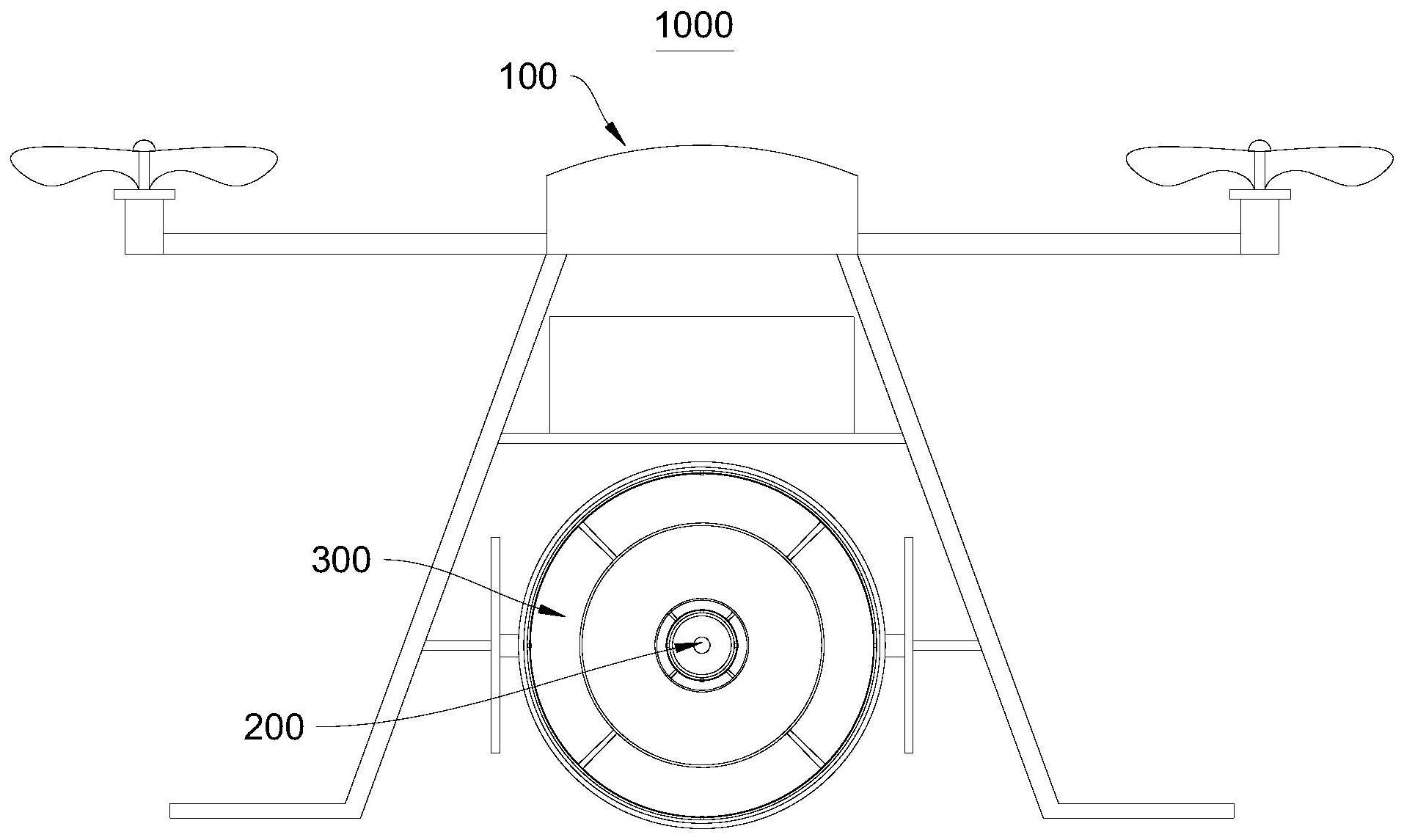
3、一种无人驾驶环卫设备,其包括:无人机、喷水组件、喷气组件、视觉组件和控制器。
4、喷水组件、喷气组件和视觉组件均安装于无人机,喷水组件、喷气组件、视觉组件和无人机均与控制器信号连接。
5、视觉组件用于获取待清洁对象的图像数据,控制器保存有各个待清洁对象在干净状态下的图像数据。控制器用于将由视觉组件获取的图像数据与待清洁对象在干净状态下的图像数据进行比对,以判断待清洁对象是否需要清洁。若判定待清理对象需要进行清洁,控制器则控制无人机携带喷水组件和喷气组件对待清洁对象进行清洁。
6、进一步的,控制器在判断待清洁对象是否需要清洁时,包括:
7、设定比例阈值;
8、确定在视觉组件获取的图像数据中待清洁对象被覆盖的面积比例,若面积比例大于或等于比例阈值,则判定待清理对象需要进行清洁,反之则判定不需要清洁。
9、进一步的,控制器则控制无人机携带喷水组件和喷气组件对待清洁对象进行清洁时,包括:
10、获取天气信息;
11、若天气干燥,则在清洁时控制器先控制喷水组件对待清洁对象进行润湿,再控制喷气组件将待清洁对象表面的污渍吹落。
12、若为雨后,则在清洁时控制喷气组件将待清洁对象表面的污渍吹落。
13、进一步的,控制器则控制无人机携带喷水组件和喷气组件对待清洁对象进行清洁时,还包括:在首次利用喷气组件将待清洁对象表面的污渍吹落后,利用视觉组件再次获取待清洁对象的图像数据,控制器判断是否需要进行清洁。若判定待清理对象需要进行清洁,控制器则控制喷水组件对待清洁对象进行冲洗,再控制喷气组件将待清洁对象表面的残留吹落。
14、进一步的,在夜间,视觉组件利用闪光模式获取待清洁对象的图像数据。
15、进一步的,喷水组件具有喷水管,喷气组件具有喷气管,喷气管的内径大于喷水管的外径,喷水管设于喷气管内且二者同轴设置。控制器通过控制喷气组件的气流强度调节喷水组件所喷出的水的分散程度。
16、进一步的,喷气管的端部为封闭结构,喷水管贯穿喷气管的端部。
17、喷气管连接有导流罩,导流罩与喷气管同轴设置,喷气管贯穿导流罩。导流罩环设于喷气管,导流罩的出口端的内侧壁平行于喷气管设置,喷气管的侧壁开设有与导流罩连通的出气口。
18、进一步的,喷气组件还包括:第一弹性圈、第一调节臂、第一控制环和第一驱动器。
19、第一调节臂靠近导流罩的口部设置,且第一调节臂的一端铰接于导流罩的内壁。第一调节臂开设有第一斜槽,第一斜槽贯穿第一调节臂的两侧并由第一调节臂的自由端朝其铰接端延伸。
20、第一弹性圈设于导流罩内并与导流罩同轴设置,第一弹性圈位于第一调节臂的铰接端靠近导流罩出口的一侧,第一弹性圈远离导流罩出口的一端连接于导流罩的内壁,第一弹性圈靠近导流罩出口的一端连接于第一调节臂的自由端。
21、第一控制环与导流罩同轴设置,第一控制环配合于第一斜槽当中。第一控制环由第一驱动器驱动,以使第一控制环能够沿导流罩的轴向进行运动,从而改变第一弹性圈的张开程度。
22、进一步的,喷气组件还包括:第二弹性圈、第二调节臂、第二控制环和第二驱动器。
23、第二调节臂靠近导流罩的口部设置,且第二调节臂的一端铰接于喷气管的外侧壁。第二调节臂开设有第二斜槽,第二斜槽贯穿第二调节臂的两侧并由第二调节臂的自由端朝其铰接端延伸。
24、第二弹性圈设于导流罩内并与喷气管同轴设置,第二弹性圈位于第二调节臂的铰接端靠近导流罩出口的一侧,第二弹性圈远离导流罩出口的一端连接于喷气管的外侧壁,第二弹性圈靠近导流罩出口的一端连接于第二调节臂的自由端。
25、第二控制环与导流罩同轴设置,第二控制环配合于第二斜槽当中。第二控制环由第二驱动器驱动,以使第二控制环能够沿导流罩的轴向进行运动,从而改变第二弹性圈的张开程度。
26、进一步的,第一驱动器和第二驱动器均为气缸。
27、本发明实施例的技术方案的有益效果包括:
28、本发明实施例提供的无人驾驶环卫设备降低了对人工的依赖程度,同时也规避了人工清洁带来的风险。
29、在工作过程中,在喷水润湿或者用水进行冲洗时,可以同时利用导流罩吹气,对喷出的水流起到收缩的作用,避免水流发散过大而影响谁留的冲击力,同时也提高润湿效果。通过控制气流强度,还可以调节气流对喷出的水流起到的收缩强度。
30、利用第一驱动器和第二驱动器可以进一步调控气流对喷出的水流的收缩效果。具体的,利用第一驱动器驱动第一控制环,能够控制第一调节臂的摆动幅度,从而改变第一弹性圈的张开程度。
31、第一弹性圈和第二弹性圈可以有效地增大对风压的调节范围,从而扩大对水流的限制范围。能够大大提高无人驾驶环卫设备在清洁过程中的灵活性,适合对不同大小、不同区域的污渍进行清洁。
32、总体而言,本发明实施例提供的无人驾驶环卫设备能够大大提高对建筑物外墙体、公交站台雨棚的清洁效率,同时降低对人工的需求度,在降低危险性的同时还降低了人工成本。
技术特征:
1.一种无人驾驶环卫设备,其特征在于,包括:无人机、喷水组件、喷气组件、视觉组件和控制器;
2.根据权利要求1所述的无人驾驶环卫设备,其特征在于,所述控制器在判断待清洁对象是否需要清洁时,包括:
3.根据权利要求1所述的无人驾驶环卫设备,其特征在于,所述控制器则控制所述无人机携带所述喷水组件和所述喷气组件对待清洁对象进行清洁时,包括:
4.根据权利要求3所述的无人驾驶环卫设备,其特征在于,所述控制器则控制所述无人机携带所述喷水组件和所述喷气组件对待清洁对象进行清洁时,还包括:在首次利用所述喷气组件将待清洁对象表面的污渍吹落后,利用所述视觉组件再次获取待清洁对象的图像数据,所述控制器判断是否需要进行清洁;若判定待清理对象需要进行清洁,所述控制器则控制所述喷水组件对待清洁对象进行冲洗,再控制所述喷气组件将待清洁对象表面的残留吹落。
5.根据权利要求1所述的无人驾驶环卫设备,其特征在于,在夜间,所述视觉组件利用闪光模式获取待清洁对象的图像数据。
6.根据权利要求1所述的无人驾驶环卫设备,其特征在于,所述喷水组件具有喷水管,所述喷气组件具有喷气管,所述喷气管的内径大于所述喷水管的外径,所述喷水管设于所述喷气管内且二者同轴设置;所述控制器通过控制所述喷气组件的气流强度调节所述喷水组件所喷出的水的分散程度。
7.根据权利要求6所述的无人驾驶环卫设备,其特征在于,所述喷气管的端部为封闭结构,所述喷水管贯穿所述喷气管的端部;
8.根据权利要求7所述的无人驾驶环卫设备,其特征在于,所述喷气组件还包括:第一弹性圈、第一调节臂、第一控制环和第一驱动器;
9.根据权利要求8所述的无人驾驶环卫设备,其特征在于,所述喷气组件还包括:第二弹性圈、第二调节臂、第二控制环和第二驱动器;
10.根据权利要求9所述的无人驾驶环卫设备,其特征在于,所述第一驱动器和所述第二驱动器均为气缸。
技术总结
本发明涉及现代环卫设备技术领域,具体涉及一种无人驾驶环卫设备,包括无人机、喷水组件、喷气组件、视觉组件和控制器。喷水组件、喷气组件和视觉组件均安装于无人机,喷水组件、喷气组件、视觉组件和无人机均与控制器信号连接。视觉组件用于获取待清洁对象的图像数据,控制器保存有各个待清洁对象在干净状态下的图像数据。控制器用于将由视觉组件获取的图像数据与待清洁对象在干净状态下的图像数据进行比对,以判断待清洁对象是否需要清洁。若判定待清理对象需要进行清洁,控制器则控制无人机携带喷水组件和喷气组件对待清洁对象进行清洁。其能提高对建筑物外墙体、公交站台雨棚的清洁效率,同时降低对人工的需求度。
技术研发人员:肖富辉,张丽子,李俊
受保护的技术使用者:江西蓝天路之友环卫设备科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!