一种植保无人机
1.本实用新型属于植保机械技术领域,具体涉及一种植保无人机。
背景技术:
2.植保无人机,又名无人飞行器,顾名思义是用于农林植物保护作业的无人驾驶飞机,该型无人飞机由飞行平台(固定翼、直升机、多轴飞行器)、导航飞控、喷洒机构三部分组成,通过地面遥控或导航飞控,来实现喷洒作业,可以喷洒药剂、种子、粉剂等。现有技术中,公开了很多植保无人机的设计方案,例如cn204674836u、cn208080400u、cn108528691a等。
3.然而提高植保装备性能的一个重要出发点是提升喷雾药液在靶标植物表面的沉积效率。喷雾作业中,喷雾雾滴在作物表面,尤其是在疏水性植物,如水稻、小麦等叶片表面难以持留,克服这一缺陷的主要途径是改变药液性质,如降低药液表面张力或提高药液黏度增加农药沉积量,或者从药械设计参数及作业参数优化角度来提升喷雾均匀程度及穿透能力以增加农药沉积效率。但现有的植保无人机无法将药液性质与作物靶标表面特性进行有效耦合,限制了农药沉积效率进一步提升的空间。
技术实现要素:
4.技术问题:本实用新型一种能够在同一设备上实现不同溶液依次喷洒的植保无人机,从而提高农药沉积效率。
5.技术方案:本实用新型提供一种植保无人机,包括:
6.机体,所述机体下方设置有起落架;
7.药箱,所述药箱设置在机体上,包括至少两个相互独立的药桶;
8.组合喷杆,所述组合喷杆通过泵液系统连接药箱;若干个所述组合喷杆设置在起落上,每个所述组合喷杆包括与药桶的数量一致的喷杆,每个喷杆的一端设置有喷头,相邻两个喷杆沿喷杆的轴向滑动设置,通过喷杆间的滑动调节喷头沿着喷杆轴向的相对位置,当植保无人机沿喷洒农药方向飞行时,不同喷头喷出的药液依次地喷洒在标靶植株上。
9.进一步地,相邻的两个喷杆上,其中一个喷杆上设置有导轨,另一个喷杆上设置有与所述导轨相配合的导槽。
10.进一步地,所述导槽上设置有锁紧部件,用于锁定导槽与导轨的相对位置。
11.进一步地,所述喷杆上设置有标尺,根据所述标尺调整喷头间沿着喷杆轴向的距离。
12.进一步地,所述泵液系统包括:
13.水泵,所述水泵包括进液口和与其对应的出液口,所述进液口的数量与药桶数量一致,每个进液口对应连接一个药桶;
14.分流器,所述分流器与出液口连接,分流器的数量与药桶数量一致,所述分流器上设置有分液口,所述分液口的数量与喷杆架上设置的组合喷杆的数量一致,所述分液口对应连接组合喷杆中的一个喷杆;
15.开关阀,所述开关阀设置在水泵与分流器连接的管路上。
16.进一步地,药箱包括两个药桶;对应的,所述组合喷杆包括两个喷杆。
17.进一步地,所述起落架上设置两个组合喷杆。
18.进一步地,所述分流器为设置在起落架上的过液管,所述过液管的两端分别连接组合喷杆中的一个喷杆。
19.进一步地,所述植保无人机为六旋翼。
20.本实用新型与现有技术相比,在无人机的起落架上设置若干组合喷杆,组合喷杆可包括多个相互滑动设置的喷杆,使得多个喷头可以调节前后位置,从而在使用时,多个喷头中的药液可以同步喷洒出。当进行喷洒农药作业时,由于喷头间的前后位置差,使得不同药液可以依次地喷洒在靶标作物上。在使用时,在前的喷头喷洒出先导制剂,在后的喷头喷洒出农药制剂,因为先导制剂的作用,靶标作物表面的润湿性能发生改变,更适合与农药制剂雾滴沾着展布,从而提高了农药沉积效率和农药利用率。本实用新型在同一植保无人机上实现了先导制剂与农药制剂的依次喷洒。
附图说明
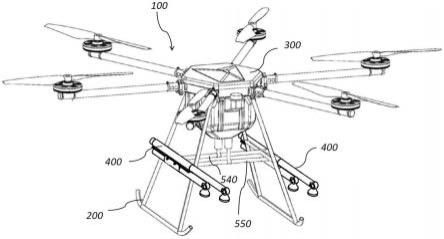
21.图1示出了植保无人机的结构示意图;
22.图2为组合喷杆的结构示意图;
23.图3为组合喷杆的爆炸结构示意图;
24.图4为组合喷杆的结构示意图(喷头反向);
25.图5为泵液系统的结构示意图。
26.图中有:100、机体;200、药箱;210、第一药桶;220、第二药桶;300、起落架;400、组合喷杆;410、第一喷杆;411、第一标尺;412、第一喷头;413、导轨;420、第二喷杆;421、第二标尺;422、第二喷头;423、导槽;424、锁紧螺栓;425、锁紧螺孔;500、泵液系统;510、水泵;520、第一开关阀;530、第二开关阀;540、第一分流器;541、第一分液口;550、第二分流器;551、第二分液口。
具体实施方式
27.下面结合实施例和说明书附图对本实用新型作进一步的说明。说明的是,实施例中的术语“第一”、“第二”等术语,仅是出于便于描述的目的,并不能理解为对数量和性质的限定。
28.图1示出了植保无人机的结构示意图,结合图1所示,本实用新型的实施例中,植保无人机包括:机体100、药箱200以及设置在无人机起落架300上的组合喷杆。在图1所示的实施例中,植保无人机的主体结构采用了申请号为201810134752.5的专利申请文件中的无人机结构。无人机的主体结构也可以采用其他现有的植保无人机结构,本实用新型不做过多限制。在申请号为201810134752.5的专利申请文件中,植保无人机可以是一个六旋翼的无人机。在其他的实施例中,也可以是四旋翼、固定翼无人机等等。无人机的控制系统等都可为现有的。在本技术的实施例中,药箱200设置在机体100上,并且,药箱200包括至少两个相互独立的药桶。说明的是,药桶的相互独立,不仅可以包括药桶完全独立,即每个药桶独立成型的形式,也可以是多个药桶一体成型,然后通过间隔的方式,形成多个独立的药桶。在
后续的说明中,主要结合两个药桶的结构形式进行详细说明,两个药桶分别为第一药桶210和第二药桶220。例如在示例中,考虑到植保无人机的体积以及重量,可以考虑用一体成型的药箱200。
29.在机体100的下方设置有起落架300,组合喷杆400设置在起落架300上。具体的,组合喷杆400要沿着无人机飞行时前进方向设置。每个组合喷杆400是由多个喷杆组合而成,具体的,组成组合喷杆400的喷杆的数量与药桶的数量一致。例如,示例中,药箱包括第一药桶210和第二药桶220,对应的每个组合喷杆400有两个喷杆。
30.结合图2和图3所示,以包括两个喷杆的组合喷杆400进行说明。组合喷杆包括第一喷杆410和第二喷杆420,其中,第一喷杆410的一端设置有第一喷头412,第二喷杆420的一端设置有第二喷头422。在喷洒农药过程中,沿着植保无人机的飞行方向,可以从第一喷头412种喷洒出先导物质,从第二喷头422种喷洒出农药制剂。当然,如果是传统的喷洒方式,也可以从两个喷头中喷洒出同样的农药制剂。
31.两个喷杆沿着喷杆的轴向方向滑动设置,例如,以第一喷杆410作参照,则第二喷杆420可沿着第一喷杆410的轴向滑动;或者以第二喷杆420作参照,则第一喷杆410可沿着第二喷杆420的轴向方向滑动。当两个喷杆沿着任一喷杆的轴向滑动时,两个喷头的位置也会变化,可以根据需求,调整喷头的前后位置,例如第一喷头412在前,第二喷头422在后。当喷洒农药时,从第一喷头412喷出的先导物质溶液,然后从第二喷头422中喷出农药制剂,沿着无人机的飞行方向,两个喷头中喷出的药液可以依次地喷洒在标靶植株上,即先导物质先喷洒到标靶植株上,农药制剂后喷洒在标靶植株上。
32.为了实现喷杆之间的相互滑动,在相邻的两个喷杆上,其中一个喷杆上设置有导轨413,另一个喷杆上设置于有与导轨413相配合的导槽423。结合图3,在第一喷杆410上设置有导轨413,对应的,在第二喷杆420上设置有导槽423,使得第二喷杆420可沿着导轨413运动,从而实现第二喷杆420沿着轴向运动。
33.然而,当将喷头的相对位置调整好后,因为喷杆间时滑动设置的,为了能够在喷撒药剂的过程中,喷头的位置需保持相对不动,需通过锁定喷杆的相对位置来保持喷头的相对位置不动。为此,在本发明的实施例中,在导槽423上设置有锁紧部件,用于锁定导槽423与导轨413的相对位置。在具体示例中,锁紧部件可以采用锁紧螺栓424,如在图3中,在导槽423上设置有锁紧螺孔425,锁紧螺孔425中设置锁紧螺栓424,当需要调节喷头的相对位置时,松开锁紧螺栓424后,调节喷杆的相对位置,当调节到需要的位置后,将锁紧螺栓锁紧,此时喷杆之间的相对位置不再变动,使得喷头的相对位置也不再发生变动。
34.在现代农业中,农作物的植株间距都会有科学的设计,从而也能够根据植株间距来确定前后喷头的位置,因此,为了更准确的确定碰头间的位置,在每个喷杆上都设置有标尺。如图2所示,具体在每个喷头位置均设置为标尺的零刻线。以图2所示的两根喷杆的实施例为例,第一喷杆410上设置有第一标尺411,第二喷杆420上设置有第二标尺421,第二喷杆420沿着第一喷杆410滑动,可以根据第二标尺421的零刻度指在第一标尺411的上刻度,从而读出两个喷头间的准确距离。通常情况下,由于无人机的飞行速度相对较快,可以将两个喷头的距离调整的相对较大。
35.进一步地,在一些示例中,考虑到无人机的飞行速度较大,可以将组合喷杆按相反的方向进行组合,如图4所示,以两个喷杆的情况为例,此时,从位置上讲,第一喷头412和第
二喷头422位于组合喷杆,两个喷头可以沿着相反的反向进行调节,使得喷头间具有足够大的间距。根据标尺进行位置调节时,只许计算出第一标尺411的零刻线和第二标尺421的零刻线间的距离即可。
36.为了能够将药箱中的药液泵出,本实用新型在机体上设置有泵液系统500,泵业装置连接药箱和组合喷杆,从而在泵液系统500开启时,将药箱中的药液泵出,并通过组合喷杆喷洒在作物植株上。结合图5所示,泵液系统500包括水泵510、分流器和开关阀,其中,水泵包括进液口和与其对应的出液口,进液口的数量与药桶数量一致,每个进液口对应连接一个药桶;分流器与出液口连接,分流器的数量与药桶数量一致,分流器上设置有分液口,所述分液口的数量与喷杆架上设置的组合喷杆的数量一致,分液口对应连接组合喷杆中的一个喷杆;开关阀设置在水泵与分流器连接的管路上。以图4所示的实施例进行详细说明。在该实例中,泵业装置包括水泵510、第一分流器540和第二分流器550,水泵510的两个进液口分别连接第一药桶210和第二药桶220,两个出液口分别连接第一分流器540和第二分流器550,因为示例中设置了两个组合喷杆400,因此第一分流器540上设置了2个第一分液口541,2个第一分液口541分别连接一个第一喷杆410。同样,第二分流器550上设置了2个第二分液口551,2个第二分液口分别连接一个第二喷杆420。因此,从第一药桶210中出来的药液可经过第一喷头412喷出;从第二药桶220中出来的药液可经过第二喷头422喷出。在水泵510与第一分流器540之间的管路上设置第一开关阀520,在水泵510与第二分流器550之间的管路上设置第二开关阀530,从而控制药液的输出。
37.在图1所示的植保无人机结构中,水泵、开关阀都设置在了内部,并未示出,对于开关阀和水泵的控制,可以直接连接无人机本身的控制器,实现无线远程控制。对于分流器,本实用新型的示例中,设计成为固定在起落架上的两个过液管,以方便可以用分流,一方面还可以增加起落架300的强度。例如,在该示例中,设置了两个组合喷杆400,每个组合喷杆400包括了第一喷杆410和第二喷杆420,因此,在起落架300上设置了两个过液管,分别起到第一分流器540和第二分流器550的作用。以位于上放的导液管为第一分流器540,位于下方的导液管为第二分流器550,则第一分流器540的两端分别连接两个组合喷杆中的第一喷杆410,第二分流器550的两端分别连接两个组合喷杆中的第二喷杆420。
38.利用本实用新型,在进行农药喷洒时,首先将先导溶液装在第一药桶中,将农药装在第二药桶中,然后调节好第一喷杆和第二喷杆的位置,使得第一喷头在前,第二头在后。在喷洒时,沿着无人机的飞行方向,在前的喷头喷洒出先导制剂,在后的喷头喷洒出农药制剂,因为先导制剂的作用,靶标作物表面的润湿性能发生改变,更适合与农药制剂雾滴沾着展布,从而提高了农药沉积效率和农药利用率。本实用新型在同一植保无人机上实现了先导制剂与农药制剂的依次喷洒。
39.上述实施例仅是本实用新型的优选实施方式,应当指出:对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以做出若干改进和等同替换,这些对本实用新型权利要求进行改进和等同替换后的技术方案,均落入本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1