一种用于无人机视频测流的示踪粒子抛洒装置的制作方法
1.本实用新型属于水文流量测量技术领域,具体涉及一种用于无人机视频测流的示踪粒子抛洒装置。
背景技术:
2.无人机视频测流一般用于超宽河面或山洪应急的非接触式流量测量,是通过无人机采集水面图像进行处理,提取画面中的水面纹理特征并进行跟踪匹配,计算出特征点的物理距离以及帧间时间,从而得出水体表面实时流速值,根据断面数据可推算出断面流量。水面纹理包括刚性漂浮物、波纹、气泡等,其中波纹、气泡的特征识别对光线要求高,水面自然产生的刚性漂浮物由于质量原型不能代表真实的表面流速,因此无人机视频测流主要通过抛洒可自然降解的特殊示踪粒子的方式进行特征纹理的跟踪。
3.但是现有的无人机抛洒装置大多存在如下缺陷:(1)投放过程中,结构易发生卡阻造成故障,导致无法继续抛洒示踪粒子;(2)结构复杂,无法通过单一吊舱进行分段定量抛洒示踪物;(3)填料、拆装及检修不便。
技术实现要素:
4.本实用新型针对现有技术中存在的技术问题,提供一种用于无人机视频测流的示踪粒子抛洒装置。
5.本实用新型解决上述技术问题的技术方案如下:
6.一种用于无人机视频测流的示踪粒子抛洒装置,包括吊挂在无人机的机身下且水平设置的吊舱、同轴于吊舱设置的旋转叶轮,以及用于驱动旋转叶轮转动的驱动舵机;所述吊舱为空心圆柱体结构,且其两端分别固定安装有前端盖和轴承架,底部沿其轴向开设有卸料口;所述轴承架可拆卸连接有后端盖,所述后端盖上开设有与轴承架相适配的避让槽;所述旋转叶轮设置在吊舱的内腔,且其通过两个轴承分别连接前端盖和轴承架;所述旋转叶轮包括至少两个用于对吊舱的内腔进行分隔的叶片,相邻两个叶片与吊舱、前端盖及后端盖合围形成用于装填示踪粒子的储料舱或用于释放示踪粒子的卸料舱。
7.在上述技术方案的基础上,本实用新型还可以做如下改进。
8.进一步,所述叶片的数量设置为至少三个。
9.进一步,所述旋转叶轮通过联轴器连接驱动舵机的输出端。
10.进一步,所述后端盖与轴承架插接并通过对称设置的两个销孔限位组件固定;所述销孔限位组件包括开设在轴承架上的限位孔以及螺纹连接于后端盖的螺栓;所述螺栓的头部固定安装有旋钮,杆部能够贯穿限位孔。
11.进一步,所述销孔限位组件还包括设置在轴承架顶部的导向块,以及开设在后端盖上、与导向块相适配的导向凹槽。
12.进一步,所述吊舱通过吊挂组件连接无人机的机身;所述吊挂组件包括滑轨挂架、对称设置的两个连接杆,以及可沿滑轨挂架水平滑动的挂钩;两个所述连接杆的顶端分别
铰接于滑轨挂架的两侧,底端分别固定连接于吊舱的左右两侧;所述挂钩的顶端固定连接于在无人机的机身,底端滑动连接于滑轨挂架。
13.进一步,所述前端盖远离吊舱的一侧上固定安装有电控箱,所述驱动舵机通过对称设置的两个支架安装在电控箱内。
14.进一步,所述电控箱的内壁上固定安装有驱动电路板,所述驱动电路板与无人机和驱动舵机电性连接。
15.进一步,所述电控箱的顶部设置有检修口,所述检修口处设置有可拆卸连接于电控箱的检修板。
16.进一步,所述卸料口的宽度不小于示踪粒子外径的三倍。
17.本实用新型的有益效果是:
18.(1)实用性和工作可靠性好,结构简单、运行稳定,示踪粒子抛洒过程中不会发生卡阻现象;
19.(2)能够通过单一吊舱实现一次装填、分段定量抛洒示踪粒子;
20.(3)方便填料、拆装及检修,操作简单。
附图说明
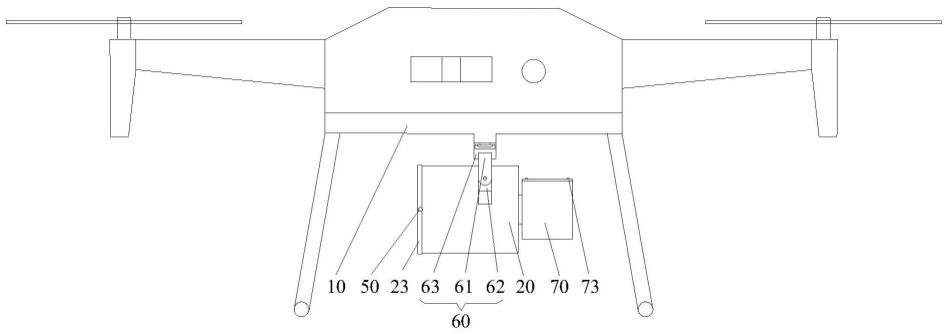
21.图1为本实用新型一种实施方式使用状态的结构示意图;
22.图2为本实用新型一种实施方式的内部结构示意图(剖视);
23.图3为本实用新型一种实施方式的轴承架与后端盖连接示意图(剖视);
24.图4为本实用新型一种实施方式的局部结构俯视图;
25.图5为本实用新型一种实施方式的吊舱内分舱结构示意图。
26.图中:
27.10、无人机,20、吊舱,21、前端盖,22、轴承架,23、后端盖,24、卸料口,25、避让槽,30、旋转叶轮,31、叶片,32、轴承,33、联轴器, 40、驱动舵机,50、销孔限位组件,51、限位孔,52、螺栓,53、导向块, 54、导向凹槽,60、吊挂组件,61、滑轨挂架,62、连接杆,63、挂钩,70、电控箱,71、支架,72、驱动电路板,73、检修板。
具体实施方式
28.以下结合附图对本实用新型的原理和特征进行描述,所举实例只用于解释本实用新型,并非用于限定本实用新型的范围。
29.如图1-图3所示,本实用新型一种实施方式设计的一种用于无人机视频测流的示踪粒子抛洒装置,包括吊挂在无人机10的机身下且水平设置的吊舱20、同轴于吊舱20设置的旋转叶轮30,以及用于驱动旋转叶轮30转动的驱动舵机40。
30.所述吊舱20为空心圆柱体结构,且其两端分别焊接有前端盖21和轴承架22,底部沿其轴向开设有用于释放示踪粒子的卸料口24。所述轴承架22 可拆卸连接有后端盖23,所述后端盖23上开设有与轴承架22相适配的避让槽25。
31.所述旋转叶轮30设置在吊舱20的内腔,且其通过两个轴承32分别连接前端盖21和轴承架22,以便于为旋转叶轮30提供支撑力的同时,保证其转动的稳定性。
32.所述旋转叶轮30包括至少两个用于对吊舱20的内腔进行分隔的叶片31。相邻两个
叶片31与吊舱20、前端盖21及后端盖23合围形成用于装填示踪粒子的储料舱或用于释放示踪粒子的卸料舱。
33.优选的,所述叶片31的数量设置为至少三个。采用本方案,能够形成多个储料舱,进而实现通过单一吊舱20进行一次装填、分段定量抛洒示踪粒子。例如,如图5所示,所述旋转叶轮30包括五个叶片31,其将吊舱20 的内腔分隔为储料舱w1、w2、w3、w4,以及与卸料口24对位的卸料舱x。实际使用中,还可以根据需要将叶片31的数量设置为四个、六个或其他。
34.在上述实施方式中,本实用新型还能进行以下的进一步改进。在改进方案中,所述旋转叶轮30通过联轴器33连接驱动舵机40的输出端。
35.这样便于连接,而且能够对前端盖21上的轴承32起到保护作用,有效避免旋转叶轮30与驱动舵机40的两轴不同心引起的卡死情况,协同作用于前端盖21和轴承架22上的轴承32,进一步保证旋转叶轮30转动的平滑顺畅。
36.在上述实施方式中,本实用新型还能进行以下的进一步改进。在改进方案中,所述后端盖23与轴承架22插接并通过对称设置的两个销孔限位组件50固定。所述销孔限位组件50包括开设在轴承架22上的限位孔51以及螺纹连接于后端盖23的螺栓52。所述螺栓52的头部固定安装有旋钮,杆部能够贯穿限位孔51。
37.采用上述结构设计,能够实现所述后端盖23与轴承架22可拆卸连接,而且有利于提高后端盖23的拆装便捷性和连接可靠性,从而提高本实用新型的操作便捷性和工作可靠性,确保在抛洒示踪粒子的过程中,后端盖23 不松脱。
38.在上述实施方式中,本实用新型还能进行以下的进一步改进。在改进方案中,所述销孔限位组件50还包括设置在轴承架22顶部的导向块53,以及开设在后端盖23上、与导向块53相适配的导向凹槽54。
39.增设上述用于导向、限位的结构设计,能够确保后端盖23插入后,轴承架22上的限位孔51与后端盖23上的螺栓52对位,进一步提升后端盖23 的装配便捷性和可靠性。
40.在上述实施方式中,本实用新型还能进行以下的进一步改进。在改进方案中,如图1、图3和图4所示,所述吊舱20通过吊挂组件60连接无人机 10的机身。所述吊挂组件60包括滑轨挂架61、对称设置的两个连接杆62,以及可沿滑轨挂架61水平滑动的挂钩63。两个所述连接杆62的顶端分别铰接于滑轨挂架61的两侧,底端分别固定连接于吊舱20的左右两侧。所述挂钩63的顶端固定连接于在无人机10的机身,底端滑动连接于滑轨挂架61。
41.采用本改进方案,能够实现将吊舱20吊挂在无人机10的机身下,同时提高吊挂可靠性以及无人机10飞行过程中吊舱20的稳定性。
42.在上述实施方式中,本实用新型还能进行以下的进一步改进。在改进方案中,所述前端盖21远离吊舱20的一侧上固定安装有电控箱70,所述驱动舵机40通过对称设置的两个支架71安装在电控箱70内。
43.采用本改进方案,配置电控箱70,对驱动舵机40进行保护,使其能够稳定运行。
44.在上述实施方式中,本实用新型还能进行以下的进一步改进。在改进方案中,所述电控箱70的内壁上固定安装有驱动电路板72,所述驱动电路板 72与无人机10和驱动舵机40电性连接。
45.增设的驱动电路板72,兼具供电及控制两大功能。具体而言,通过连接在驱动电路板72上的电缆由无人机10对驱动舵机40供电,通过驱动电路板72上的信号线接收控制信
号,即实际使用中,通过远程控制无人机飞控系统发送控制信号给驱动电路板72,驱动电路板72对驱动舵机40供电及转速、角度的控制,驱动舵机40带动旋转叶轮30完成设定转速及角度的转动,进而实现通过吊舱20完成一次装填、分段定量释放示踪粒子。
46.在上述实施方式中,本实用新型还能进行以下的进一步改进。在改进方案中,所述电控箱70的顶部设置有检修口,所述检修口处设置有可拆卸连接于电控箱70的检修板73。
47.采用本改进方案,当控制及驱动出现故障时,有利于对电控箱70内的驱动舵机40和/或驱动电路板72进行检修/维护。
48.在上述实施方式中,本实用新型还能进行以下的进一步改进。在改进方案中,所述卸料口24的宽度不小于示踪粒子外径的三倍。
49.采用本改进方案,能够进一步提升本实用新型的工作可靠性和测量结果的准确性,有效避免示踪粒子释放过程中出现卡壳现象而影响测量结果的准确性。
50.如图5所示,本实施方式的工作原理/操作过程如下:
51.(1)填料:首先旋松后端盖23上的螺栓52至螺栓52的杆部远离限位孔51,自轴承架22上取下后端盖23,然后自吊舱20的后端处向吊舱20的四个储料舱w1、w2、w3和w4内分别装填示踪粒子,此时卸料舱x与卸料口 24对位,最后在导向凹槽54对准导向块53时推动后端盖23至轴承架22 上,并旋紧后端盖23上的螺栓52至螺栓52的杆部贯穿限位孔51,以保证在抛洒示踪粒子的过程中后端盖23不松脱。
52.(2)抛洒示踪粒子:将无人机10飞临需要测流区域水面的上方,通过远程遥控驱动电路板72向驱动舵机40供电并发出控制指令时,驱动舵机40 控制旋转叶轮30进行设定角度和速度的转动,使储料舱w1沿顺时针方向转动至原卸料舱x所在的位置,储料舱w1内的示踪粒子自卸料口24被抛洒至水面,待储料舱w1内的示踪粒子抛洒完毕,无人机10向下一区域飞行。
53.无人机10飞临下一区域后,同法进行储料舱w2内的示踪粒子的抛洒,以此类推,直至所有储料舱内的示踪粒子抛洒完毕,控制旋转叶轮30转动至复位(原卸料舱x与卸料口24对位),关闭储料舱。
54.本实用新型中,未对结构进行描述的设备及组件,均为市售设备或组件,例如驱动电路板72。
55.以上所述仅为本实用新型的较佳实施例,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1