一种无人机的升降归中机构的制作方法
1.本实用新型涉及无人机技术领域,尤其涉及了一种无人机的升降归中机构。
背景技术:
2.无人驾驶飞机简称“无人机”,是利用无线电遥控设备和自备的程序控制装置操作的不载人飞机,或者由车载计算机完成地或间歇地自主地操作。
3.与有人驾驶飞机相比,无人机往往更适合那些太“愚钝、肮脏或危险”的任务。无人机按应用领域,可分为军用与民用。军用方面,无人机分为侦察机和靶机。民用方面,无人机在航拍、农业、植保、微型自拍、快递运输、灾难救援、观察野生动物、监控传染病、测绘、新闻报道、电力巡检、救灾、影视拍摄、制造浪漫等领域的应用,大大的拓展了无人机本身的用途,发达国家也在积极扩展行业应用与发展无人机技术。
4.目前市场上的无人机巡检工作主要有两种实现方案:一种是全人工作业,全人工作业无人机进行巡逻巡检的作业场景中,通常需要操作人员携带无人机至作业现场,无人机携带过程中需要拆除桨叶、拆除挂载,以避免运输过程中颠簸损坏,在作业前,需要人员重新拼装桨叶、调校无人机、寻找起飞场地等准备工作,同时需要接受过专业培训的飞手(操作无人机的人员)进行无人机操作,效率低且人员成本高,不同人员操作获得结果不一,也不利于检查的一致性。另一种是车载移动机场作业,车载移动机场为一台搭载巡检无人机的车辆,无人机平时搭载在车内,在户外场景进行巡检巡逻作业时,车载手动起降平台上实现无人机起降,同时开展无人机精细化巡检作业,无人机操作员在车内或车外使用遥控器对无人机进行操作,无人机返回移动机场后,通过人工对无人机进行固定或收纳。
5.现有技术中车载移动机场作业渐渐替代全人工作业,但是由于无人机的性能影响,无人机不是每次降落后都能停在车载移动机场的中心位置,现有是通过机械手将无人机搬运到中心位置,采用机械手这种归中方式不能兼容多款无人机,开合距离较小,兼容性差。
技术实现要素:
6.针对现有技术存在的不足,本实用新型的目的就在于提供了一种无人机的升降归中机构,使开合距离最大化,兼容性好,可以适用多款无人机,保护无人机的同时提高了定位精度,通过停机坪的升降功能使得无人机搭载于车内,方便在户外场景进行巡检巡逻作业。
7.为了实现上述目的,本实用新型采用的技术方案是这样的:一种无人机的升降归中机构,包括升降机构、归中机构、停机坪,所述升降机构包括升降底座、底座驱动模组、驱动臂组件,所述底座驱动模组设置于升降底座上,驱动臂组件的底部滑动连接于底座驱动模组上,驱动臂组件的顶部滑动连接于停机坪的底部,底座驱动模组驱动驱动臂组件带动停机坪做升降运动;所述归中机构包括推中推杆组件、推杆驱动模组,所述推杆驱动模组设置于停机坪下表面,所述推中推杆组件设置于停机坪上表面,所述推杆驱动模组驱动推中
推杆组件带动无人机归中设置。
8.作为一种优选方案,所述升降底座上设置有第一底座滑轨组、第一底座滑动板,所述第一底座滑轨组上设置有第一底座滑块,所述第一底座滑动板通过第一底座滑块滑动连接于第一底座滑轨组上。
9.作为一种优选方案,所述底座驱动模组包括底座驱动电机、底座驱动丝杆、底座驱动拉杆组,所述底座驱动丝杆在轴向上与底座驱动电机的电机轴相连接,且底座驱动丝杆上套设有丝杆螺母;所述丝杆螺母上固定连接有拉杆驱动块,所述底座驱动拉杆组的一端与拉杆驱动块相连接,底座驱动拉杆组的另一端与第一底座滑动板相连接。
10.作为一种优选方案,所述升降底座上设置有第二底座滑轨组、顶升块,所述第二底座滑轨组与底座驱动丝杆相互平行设置,所述顶升块通过第二底座滑块滑动设置于第二底座滑轨组上,所述第二底座滑块与拉杆驱动块相连接。
11.作为一种优选方案,所述驱动臂组件包括第一长杆臂、第二长杆臂,第一长杆臂、第二长杆臂在中心位置通过顶升滚交叉设置;所述驱动臂组件至少有两组,相邻驱动臂组件相互平行设置,所述顶升滚的两端与相邻驱动臂组件的第一长杆臂、第二长杆臂在中心位置相连接。
12.作为一种优选方案,所述顶升滚上套设有顶升滚轮,所述顶升块的上部设有内凹弧面,所述顶升块的内凹弧面与顶升滚轮的外弧面相抵接。
13.作为一种优选方案,所述停机坪下表面设置有第三底座滑轨组、第二底座滑动板,所述第三底座滑轨组上设置有第三底座滑块,所述第二底座滑动板通过第三底座滑块滑动连接于第三底座滑轨组上。
14.作为一种优选方案,两组所述驱动臂组件的第一长杆臂的顶部连接有第四底座滑块,两组所述驱动臂组件的第一长杆臂的底部与升降底座相连接,所述第四底座滑块设置于第三底座滑轨组上;两组所述驱动臂组件的第二长杆臂的顶部与第二底座滑动板铰接,两组所述驱动臂组件的第二长杆臂的底部与第一底座滑动板铰接。
15.作为一种优选方案,所述推中推杆组件包括第一归中推杆、第二归中推杆、第三归中推杆、第四归中推杆,所述第一归中推杆、第二归中推杆在横向相互平行设置,所述第三归中推杆、第四归中推杆在纵向相互平行设置,所述第一归中推杆、第二归中推杆、第三归中推杆、第四归中推杆在停机坪的上表面呈“井”字状分布。
16.作为一种优选方案,所述推杆驱动模组分为横向推杆驱动模组和纵向推杆驱动模组,所述横向推杆驱动模组包括横向推杆电机、第一推杆皮带、第一推杆滑块、第一推杆传动轮、横向推杆传动杆、第二推杆皮带、第二推杆滑块、第二推杆传动轮,所述横向推杆电机的电机轴与第一推杆传动轮轴向连接,所述第一推杆皮带套设于第一推杆传动轮上,所述第一归中推杆通过第一推杆滑块设置于第一推杆皮带上,所述第二推杆传动轮通过横向推杆传动杆与第一推杆传动轮轴向连接,第二推杆皮带套设于第二推杆传动轮上,所述第二归中推杆通过第二推杆滑块设置于第二推杆皮带上;所述纵向推杆驱动模组的结构与横向推杆驱动模组的结构相同,第三归中推杆、第四归中推杆设置于纵向推杆驱动模组。
17.与现有技术相比,本实用新型的有益效果:本实用新型的升降归中机构使开合距离最大化,兼容性好,可以适用多款无人机,保护无人机的同时提高了定位精度,通过停机坪的升降功能使得无人机搭载于车内,方便在户外场景进行巡检巡逻作业。
附图说明
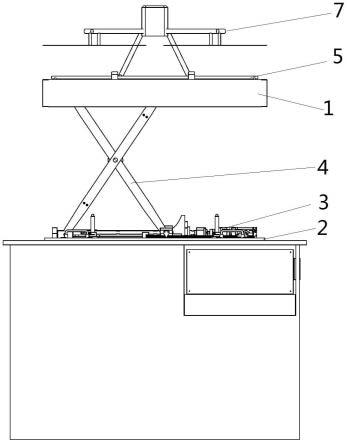
18.图1是本实用新型的主视图;
19.图2是本实用新型中升降机构的主视图;
20.图3是本实用新型中升降机构的俯视图;
21.图4是本实用新型中归中机构、停机坪的立体图;
22.图5是本实用新型中归中机构、停机坪的仰视图;
23.其中附图标识列表:停机坪1、升降底座2、底座驱动模组3、驱动臂组件4、推中推杆组件5、推杆驱动模组6、无人机7、第一底座滑轨组8、第一底座滑动板9、第一底座滑块10、第一底座滑轨11、第二底座滑轨12、底座驱动电机13、底座驱动丝杆14、底座驱动拉杆组15、丝杆螺母16、拉杆驱动块17、第一底座驱动拉杆18、第二底座驱动拉杆19、第二底座滑轨组20、顶升块21、第二底座滑块22、第三底座滑轨23、第四底座滑轨24、第一长杆臂25、第二长杆臂26、顶升滚27、顶升滚轮28、内凹弧面29、第三底座滑轨组30、第二底座滑动板31、第三底座滑块32、第四底座滑块33、第五底座滑轨34、第六底座滑轨35、第一归中推杆36、第二归中推杆37、第三归中推杆38、第四归中推杆39、横向推杆驱动模组40、纵向推杆驱动模组41、横向推杆电机42、第一推杆皮带43、第一推杆滑块44、第一推杆传动轮45、横向推杆传动杆46、第二推杆皮带47、第二推杆滑块48、第二推杆传动轮49。
具体实施方式
24.下面结合具体实施例对本实用新型作进一步描述。以下实施例仅用于更加清楚地说明本实用新型的技术方案,而不能以此来限制本实用新型的保护范围。
25.实施例:
26.如图1所示,一种无人机的升降归中机构,包括升降机构、归中机构、停机坪1,所述升降机构包括升降底座2、底座驱动模组3、驱动臂组件4,所述底座驱动模组3设置于升降底座2上,驱动臂组件4的底部滑动连接于底座驱动模组3上,驱动臂组件4的顶部滑动连接于停机坪1的底部,底座驱动模组3驱动驱动臂组件4带动停机坪1做升降运动;所述归中机构包括推中推杆组件5、推杆驱动模组6,所述推杆驱动模组6设置于停机坪1下表面,所述推中推杆组件5设置于停机坪1上表面,所述推杆驱动模组6驱动推中推杆组件5带动无人机7归中设置。
27.具体的,所述停机坪1呈方型盖子状。
28.如图2~3所示,优选的,所述升降底座2上设置有第一底座滑轨组8、第一底座滑动板9,所述第一底座滑轨组8上设置有第一底座滑块10,所述第一底座滑动板9通过第一底座滑块10滑动连接于第一底座滑轨组8上。
29.具体的,在本实施例中第一底座滑轨组8为平行设置的第一底座滑轨11、第二底座滑轨12,第一底座滑块10有两个,两个第一底座滑块10分别设置于第一底座滑轨11、第二底座滑轨12上,所述第一底座滑动板9的一端通过第一底座滑块10滑动连接于第一底座滑轨11上,第一底座滑动板9的另一端通过第一底座滑块10滑动连接于第二底座滑轨12上,第一底座滑动板9与第一底座滑轨11、第二底座滑轨12垂直设置。
30.优选的,所述底座驱动模组3包括底座驱动电机13、底座驱动丝杆14、底座驱动拉杆组15,所述底座驱动丝杆14在轴向上与底座驱动电机13的电机轴相连接,且底座驱动丝
杆14上套设有丝杆螺母16;所述丝杆螺母16上固定连接有拉杆驱动块17,所述底座驱动拉杆组15的一端与拉杆驱动块17相连接,底座驱动拉杆组15的另一端与第一底座滑动板9相连接。
31.具体的,所述底座驱动丝杆14与第一底座滑轨11、第二底座滑轨12相互平行设置,且底座驱动丝杆14位于第一底座滑轨11、第二底座滑轨12的中心线上;所述底座驱动拉杆组15包括与底座驱动丝杆14相互平行设置的第一底座驱动拉杆18、第二底座驱动拉杆19,第一底座驱动拉杆18、第二底座驱动拉杆19以底座驱动丝杆14对称设置。
32.优选的,所述升降底座2上设置有第二底座滑轨组20、顶升块21,所述第二底座滑轨组20与底座驱动丝杆14相互平行设置,所述顶升块21通过第二底座滑块22滑动设置于第二底座滑轨组20上,所述第二底座滑块22与拉杆驱动块17相连接。
33.具体的,在本实施例中第二底座滑轨组20为平行设置的第三底座滑轨23、第四底座滑轨24,第三底座滑轨23、第四底座滑轨24以底座驱动丝杆14对称设置并位于底座驱动丝杆14的两侧,第二底座滑块22有两个,两个第二底座滑块22分别设置于第三底座滑轨23、第四底座滑轨24上,所述顶升块21有两个,两个顶升块21分别设置于第二底座滑块22上。
34.优选的,所述驱动臂组件4包括第一长杆臂25、第二长杆臂26,第一长杆臂25、第二长杆臂26在中心位置通过顶升滚27交叉设置;所述驱动臂组件4至少有两组,相邻驱动臂组件4相互平行设置,所述顶升滚27的两端与相邻驱动臂组件4的第一长杆臂25、第二长杆臂26在中心位置相连接。
35.更为优选的,所述顶升滚27上套设有顶升滚轮28,所述顶升块21的上部设有内凹弧面29,所述顶升块21的内凹弧面29与顶升滚轮28的外弧面相抵接。
36.优选的,所述停机坪1下表面设置有第三底座滑轨组30、第二底座滑动板31,所述第三底座滑轨组30上设置有第三底座滑块32,所述第二底座滑动板31通过第三底座滑块32滑动连接于第三底座滑轨组30上。
37.更为优选的,两组所述驱动臂组件4的第一长杆臂25的顶部连接有第四底座滑块33,两组所述驱动臂组件4的第一长杆臂25的底部与升降底座2相连接,所述第四底座滑块33设置于第三底座滑轨组30上;两组所述驱动臂组件4的第二长杆臂26的顶部与第二底座滑动板31铰接,两组所述驱动臂组件4的第二长杆臂26的底部与第一底座滑动板9铰接。
38.具体的,在本实施例中第三底座滑轨组30为平行设置的第五底座滑轨34、第六底座滑轨35,第三底座滑块32有两个,两个第三底座滑块32分别设置于第五底座滑轨34、第六底座滑轨35上,所述第二底座滑动板31的一端通过第三底座滑块32滑动连接于第五底座滑轨34上,第二底座滑动板31的另一端通过第三底座滑块32滑动连接于第六底座滑轨35上,第二底座滑动板31与第五底座滑轨34、第六底座滑轨35垂直设置。
39.更为具体的,在本实施例中,所述驱动臂组件4有两组,所述顶升滚27的轴向与底座驱动丝杆14的轴向相互垂直设置,两组驱动臂组件4以底座驱动丝杆14为中心对称设置;第一组驱动臂组件4的第一长杆臂25底部固定设置于升降底座2上,第一组驱动臂组件4的第一长杆臂25顶部通过第四底座滑块33滑动连接于第五底座滑轨34上,第一组驱动臂组件4的第二长杆臂26底部铰接于第一底座滑动板9位于第一底座滑轨11的一端,第一组驱动臂组件4的第二长杆臂26顶部铰接于第二底座滑动板31位于第五底座滑轨34的一端;同理,第二组驱动臂组件4的第一长杆臂25底部固定设置于升降底座2上,第二组驱动臂组件4的第
一长杆臂25顶部通过第四底座滑块33滑动连接于第六底座滑轨35上,第二组驱动臂组件4的第二长杆臂26底部铰接于第一底座滑动板9位于第二底座滑轨12的一端,第二组驱动臂组件4的第二长杆臂26顶部铰接于第二底座滑动板31位于第六底座滑轨35的一端。
40.如图4~5所示,优选的,所述推中推杆组件5包括第一归中推杆36、第二归中推杆37、第三归中推杆38、第四归中推杆39,所述第一归中推杆36、第二归中推杆37在横向相互平行设置,所述第三归中推杆38、第四归中推杆39在纵向相互平行设置,所述第一归中推杆36、第二归中推杆37、第三归中推杆38、第四归中推杆39在停机坪1的上表面呈“井”字状分布。
41.优选的,所述推杆驱动模组6分为横向推杆驱动模组40和纵向推杆驱动模组41,所述横向推杆驱动模组40包括横向推杆电机42、第一推杆皮带43、第一推杆滑块44、第一推杆传动轮45、横向推杆传动杆46、第二推杆皮带47、第二推杆滑块48、第二推杆传动轮49,所述横向推杆电机42的电机轴与第一推杆传动轮45轴向连接,所述第一推杆皮带43套设于第一推杆传动轮45上,所述第一归中推杆36通过第一推杆滑块44设置于第一推杆皮带43上,所述第二推杆传动轮49通过横向推杆传动杆46与第一推杆传动轮45轴向连接,第二推杆皮带47套设于第二推杆传动轮49上,所述第二归中推杆37通过第二推杆滑块48设置于第二推杆皮带47上;所述纵向推杆驱动模组41的结构与横向推杆驱动模组40的结构相同,第三归中推杆38、第四归中推杆39设置于纵向推杆驱动模组41。
42.具体的,所述横向推杆电机42驱动第一推杆传动轮45转动,由于横向推杆传动杆46的作用第二推杆传动轮49与第一推杆传动轮45同步转动,进而带动第一推杆皮带43、第二推杆皮带47运动,第一推杆皮带43上的第一推杆滑块44随着第一推杆皮带43运动,第二推杆皮带47上的第二推杆滑块48随着第二推杆皮带47运动,从而第一推杆滑块44上的第一归中推杆36、第二推杆滑块48上的第二归中推杆37运动。
43.更为具体的,在本实施例中,所述横向推杆驱动模组40带动所述推中推杆组件5的第一归中推杆36、第二归中推杆37在横向上靠近中心点移动或远离中心点移动,所述纵向推杆驱动模组41带动所述推中推杆组件5的第三归中推杆38、第四归中推杆39在纵向上靠近中心点移动或远离中心点移动,第一归中推杆36、第二归中推杆37、第三归中推杆38、第四归中推杆39同步进行,从而对无人机7向中心点归中设置。
44.具体实施时,当需要将停机坪1向上升起时,底座驱动电机13驱动底座驱动丝杆14,顶升滚轮28移动至顶升块21的内凹弧面29顶端时,底座驱动丝杆14与丝杆螺母16相配合驱动设置有顶升块21的第二底座滑块22继续移动,此时,顶升块21可以通过底座驱动拉杆组15带动驱动臂组件4继续移动,从而进行二次举升;然后推杆驱动模组6带动推中推杆组件5运动松开无人机7,无人机7起飞巡检,当无人机7使用结束后,飞回到停机坪1,推杆驱动模组6带动推中推杆组件5运动归中无人机7,底座驱动模组3将停机坪1向下降落回收。
45.以上所述仅是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型技术原理的前提下,还可以做出若干改进和变形,这些改进和变形也应视为本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1