实时定位导航的无人机设备的制作方法
1.本实用新型涉及无人机技术领域,具体为实时定位导航的无人机设备。
背景技术:
2.随着科学技术水平的发展,无人机在人类社会中涉及的领域越来越广泛,使用方式和执行的任务也越来越灵活,为了提高无人机定位导航的准确性,对无人机的导航方式进行不断的优化改进,目前,无人机机载导航设备的发展需求可以归纳为高精度、小型化、低成本,mems技术制造工艺的发展为无人机提供了低成本、体积小、重量轻的机载惯性导航器件,但是精度上尚不能满足一些对导航精度要求较高的复杂任务的需求,为了提高mems惯导导航的精度,通过增加辅助定位系统,不断获取实时的定位坐标,对惯导进行误差纠正和补偿,这种方式也被称为组合导航方式,组合导航方式多采用mems和gps组合导航,并通过rtk定位技术来改良gps定位精度不足的问题,rtk是一种载波相位差分技术,可以消除在gps定位中产生的大部分误差,使定位结果的精度大幅度提高,甚至可以到达厘米级,从而有效提高无人机的实时定位导航精度。
3.公开号为cn215554202u的专利公开了一种高精度导航无人机,包括机体,所述机体的底部固定连接有起落架,所述机体的两侧顶部均固定连接有机臂,所述机臂远离机体的一端转动连接有机翼,所述机体的顶部固定连接有安装壳,所述安装壳的一侧通过螺钉固定连接有盖板,所述盖板的顶部固定连接有卫星导航天线,所述安装壳的内部固定连接有固定板。该高精度导航无人机,通过固定板、支撑架、连接板、限位块、安装槽、限位杆、弹性弧形板、压板和插孔之间的配合,无需对机体进行拆卸,即可将安装壳内部的导航模块移出,扩大了检修人员的操作空间,从而使导航模块的检修操作省时省力,提高了检修效率。
4.虽然上述技术方案通过固定板、支撑架、连接板、限位块、安装槽、限位杆、弹性弧形板、压板和插孔之间的配合,无需对机体进行拆卸,即可将安装壳内部的导航模块移出,扩大了检修人员的操作空间,从而使导航模块的检修操作省时省力,提高了检修效率,但是该技术方案在具体使用时,由于盖板是通过螺钉固定在安装壳侧面的,在拆装盖板时需要使用螺丝刀,也就是需要借助工具才能打开,而为了确保稳定性,所需螺钉的数量至少为两个,因此,在取出导航模块时还是存在一定的繁琐操作,并且该技术方案中用于定位导航模块的结构过于复杂,其中采用的限位杆和弹性弧形板都属于易损坏结构,限位杆在使用过程中一旦发生折断还会对导航模块造成影响,鉴于此,我们提出实时定位导航的无人机设备。
技术实现要素:
5.本实用新型的目的在于提供实时定位导航的无人机设备,以解决上述背景技术中提出的问题。
6.为实现上述目的,本实用新型提供如下技术方案:
7.实时定位导航的无人机设备,包括无人机机体,无人机机体的左右两侧且靠近前
后两端的位置均设有机臂,四个所述机臂的顶部且位于外端的位置均设有旋翼,所述无人机机体的后侧可拆卸连接有锂电池,无人机机体的底部且靠近前侧的位置还设有两个指示灯,用于提醒使用者无人机的位置和移动方向,指示灯、机臂、旋翼和锂电池均为现有无人机上的部件,用于无人机的升降和飞行,为现有成熟技术,在此不再赘述;
8.所述无人机机体的底部开设有矩形设备仓,主要用于容纳无人机控制主板,所述无人机机体的底部且位于矩形设备仓的开口处开设有矩形避让槽,所述矩形避让槽内活动插接有盖板,采用活动插接的方式,可以便于盖板的拆装,从而便于无人机控制主板的取出和安装,有利于使用者对无人机进行维护,盖板可以刚好嵌入矩形避让槽内,保持无人机机体底部的平整性;
9.所述盖板的顶部设有活动插接于矩形设备仓内的凸台,盖板和凸台一体成型,采用导热材质,如铝合金材质,重量轻的同时可以与外界进行热传递,有利于散热;
10.所述凸台的顶部且靠近四个边角的位置均设有固定柱,四个所述固定柱的顶端通过螺钉共同可拆卸连接有无人机控制主板,将无人机控制主板的位置固定,所述无人机控制主板上安装有用于实时定位导航的mems惯性导航模块和rtk差分gps模块,无人机控制主板上还安装有无人机所需的其他控制模块,如陀螺仪、加速计和地磁感应等,均为无人机主板上必备的安装模块,在此不再赘述;
11.采用mems惯性导航模块和rtk差分gps模块组合使用,rtk技术可以有效提高gps定位精度,同时也具有较远的距离,10km内的单基站差分也可以满足大多数情况下无人机的导航距离,并且信号受到干扰小,只要能接收gps信号,就可以以满足大多数情况下无人机的导航距离,并且信号受到干扰小,只要能接收gps信号,就可以实现ptk定位,使用实时定位手段不断对mems惯导进行修正,从而实现无人机的高精度实时定位导航。
12.优选的,四个所述机臂的底部且位于外端的位置均设有支脚,且所述支脚内设有用于驱动旋翼转动的无刷电机,支脚的底端位于无人机机体的下方,避免无人机机体与地面接触。
13.优选的,所述无人机机体前侧的底部开设有u形安装槽,所述u形安装槽内转动连接有用于航拍的摄像头,用于航拍和记录。
14.优选的,所述无人机机体的顶部且靠近后侧的位置设有与无人机控制主板电性连接的天线,用于mems惯性导航模块和rtk差分gps模块的信号传输。
15.优选的,所述矩形避让槽内壁的顶部开设有第一框形凹槽,所述盖板的顶部开设有与第一框形凹槽位置相对应的第二框形凹槽,所述第一框形凹槽与第二框形凹槽之间活动连接有框形密封橡胶;
16.当所述盖板位于矩形避让槽内时,所述框形密封橡胶的上半部分位于第一框形凹槽内,所述框形密封橡胶的下半部分位于第二框形凹槽内,提高盖板与无人机机体连接处密封性,避免液体或颗粒物进入矩形设备仓内,对无人机控制主板起到防护作用。
17.优选的,所述矩形避让槽内壁的顶部且位于左右两侧边缘中部的位置均向上竖直开设有矩形定位插槽,所述盖板的顶部且位于左右两侧边缘中部的位置均设有矩形定位插块,两个所述矩形定位插块分别活动插接于两个矩形定位插槽内,矩形定位插块可以被矩形定位滑块定位在矩形定位插槽内,从而使盖板被固定在矩形避让槽内。
18.优选的,所述无人机机体内且分别位于两个矩形定位插槽相背侧面中部的位置均
开设有矩形活动槽,两个所述矩形活动槽内均滑动连接有矩形定位滑块,所述矩形定位插块侧面的中部开设有矩形定位孔,所述矩形定位滑块活动插接于矩形定位孔内,矩形定位滑块的长度大于矩形定位孔的深度,当需要拆卸盖板时,只需要控制两个矩形定位滑块分别从两个矩形定位孔内移出即可。
19.优选的,所述无人机机体内且分别位于两个矩形活动槽相背侧面的位置均开设有矩形驱动仓,两个所述矩形驱动仓内壁的前后两侧之间均转动连接有蜗轮,两个所述蜗轮相对侧面的中部均同轴连接有螺纹杆,通过蜗轮带动螺纹杆转动;
20.两个所述矩形定位滑块分别螺纹连接于两个螺纹杆的外壁,因为矩形定位滑块是滑动连接于矩形活动槽内的,所以矩形定位滑块可以被螺纹杆稳定驱动,实现矩形定位滑块的前后移动。
21.优选的,两个所述矩形驱动仓内壁的上下两侧之间均转动连接有蜗杆,两个所述蜗杆分别与两个蜗轮啮合传动,通过蜗杆驱动蜗轮转动,因为蜗杆和蜗轮具备自锁功能,可以避免矩形定位滑块在无人机的飞行过程中发生移位,确保盖板有效固定在矩形避让槽内;
22.所述蜗杆转轴的底端穿过矩形驱动仓内壁的底部至外界,且所述蜗杆转轴的底端固定连接有旋钮,旋钮的顶部与无人机机体的底部相贴合,可以便于使用者转动蜗杆。
23.与现有技术相比,本实用新型的有益效果是:
24.1、该实时定位导航的无人机设备,无人机控制主板上安装有调校好的mems惯性导航模块和rtk差分gps模块,可以使该无人机具备高精度的实时定位导航功能。
25.2、当需要对无人机进行维护或检修时,只需要转动两个旋钮,带动两个蜗杆转动,两个蜗杆分别驱动两个蜗轮转动,从而驱动两个螺纹杆转动,两个螺纹杆分别驱动两个矩形定位滑块相背移动,使矩形定位滑块从矩形定位孔内移出,进而使两个矩形定位插块可以分别从两个矩形定位插槽内移出,实现无人机控制主板的取出,该操作方式简单,不需要借助其他工具,方便使用者对无人机进行维护。
26.3、通过设置的框形密封橡胶,可以有效提高盖板与无人机机体连接处密封性,避免液体或颗粒物进入矩形设备仓内,对无人机控制主板起到防护作用。
附图说明
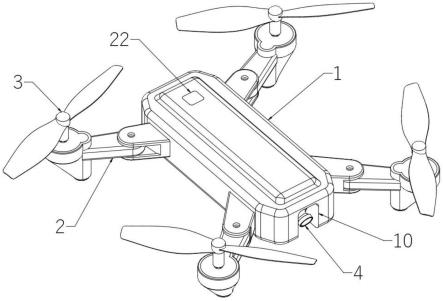
27.图1为本实用新型的整体第一视角结构示意图;
28.图2为本实用新型的整体第二视角结构示意图;
29.图3为本实用新型的部分结构示意图;
30.图4为本实用新型中的无人机机体的部分结构示意图之一;
31.图5为本实用新型中的无人机机体的部分结构示意图之二;
32.图6为本实用新型图5中a处的结构放大示意图;
33.图7为本实用新型中的盖板、无人机控制主板和框形密封橡胶的装配结构示意图;
34.图8为本实用新型中的盖板结构示意图。
35.图中:无人机机体1、u形安装槽10、矩形设备仓11、矩形避让槽12、矩形定位插槽13、第一框形凹槽14、矩形活动槽16、矩形驱动仓17、机臂2、旋翼3、摄像头4、锂电池5、盖板6、凸台60、固定柱600、矩形定位插块61、矩形定位孔610、第二框形凹槽62、无人机控制主板
7、框形密封橡胶8、蜗轮9、螺纹杆18、矩形定位滑块19、蜗杆20、旋钮21、天线22。
具体实施方式
36.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
37.在本实用新型的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
38.请参阅图1-图8,本实用新型提供一种技术方案:
39.实时定位导航的无人机设备,包括无人机机体1,无人机机体1的左右两侧且靠近前后两端的位置均设有机臂2,四个机臂2的顶部且位于外端的位置均设有旋翼3,无人机机体1的后侧可拆卸连接有锂电池5,无人机机体1的底部且靠近前侧的位置还设有两个指示灯,用于提醒使用者无人机的位置和移动方向,指示灯、机臂2、旋翼3和锂电池5均为现有无人机上的部件,用于无人机的升降和飞行,为现有成熟技术,在此不再赘述;
40.无人机机体1的底部开设有矩形设备仓11,主要用于容纳无人机控制主板7,无人机机体1的底部且位于矩形设备仓11的开口处开设有矩形避让槽12,矩形避让槽12内活动插接有盖板6,采用活动插接的方式,可以便于盖板6的拆装,从而便于无人机控制主板7的取出和安装,有利于使用者对无人机进行维护,盖板6可以刚好嵌入矩形避让槽12内,保持无人机机体1底部的平整性;
41.盖板6的顶部设有活动插接于矩形设备仓11内的凸台60,盖板6和凸台60一体成型,采用导热材质,如铝合金材质,重量轻的同时可以与外界进行热传递,有利于散热;
42.凸台60的顶部且靠近四个边角的位置均设有固定柱600,四个固定柱600的顶端通过螺钉共同可拆卸连接有无人机控制主板7,将无人机控制主板7的位置固定,无人机控制主板7上安装有用于实时定位导航的mems惯性导航模块和rtk差分gps模块,无人机控制主板7上还安装有无人机所需的其他控制模块,如陀螺仪飞行姿态感知、加速计和地磁感应等,均为无人机主板上必备的安装模块,在此不再赘述;
43.采用mems惯性导航模块和rtk差分gps模块组合使用,rtk技术可以有效提高gps定位精度,同时也具有较远的距离,10km内的单基站差分也可以满足大多数情况下无人机的导航距离,并且信号受到干扰小,只要能接收gps信号,就可以以满足大多数情况下无人机的导航距离,并且信号受到干扰小,只要能接收gps信号,就可以实现ptk定位,使用实时定位手段不断对mems惯导进行修正,从而实现无人机的高精度实时定位导航。
44.本实施例中,四个机臂2的底部且位于外端的位置均设有支脚,且支脚内设有用于驱动旋翼3转动的无刷电机,支脚的底端位于无人机机体1的下方,避免无人机机体1与地面接触。
45.具体的,无人机机体1前侧的底部开设有u形安装槽10,u形安装槽10内转动连接有
用于航拍的摄像头4,用于航拍和记录。
46.进一步的,无人机机体1的顶部且靠近后侧的位置设有与无人机控制主板7电性连接的天线22,用于mems惯性导航模块和rtk差分gps模块的信号传输。
47.进一步的,矩形避让槽12内壁的顶部开设有第一框形凹槽14,盖板6的顶部开设有与第一框形凹槽14位置相对应的第二框形凹槽62,第一框形凹槽14与第二框形凹槽62之间活动连接有框形密封橡胶8;
48.当盖板6位于矩形避让槽12内时,框形密封橡胶8的上半部分位于第一框形凹槽14内,框形密封橡胶8的下半部分位于第二框形凹槽62内,提高盖板6与无人机机体1连接处密封性,避免液体或颗粒物进入矩形设备仓11内,对无人机控制主板7起到防护作用。
49.进一步的,矩形避让槽12内壁的顶部且位于左右两侧边缘中部的位置均向上竖直开设有矩形定位插槽13,盖板6的顶部且位于左右两侧边缘中部的位置均设有矩形定位插块61,两个矩形定位插块61分别活动插接于两个矩形定位插槽13内,矩形定位插块61可以被矩形定位滑块19定位在矩形定位插槽13内,从而使盖板6被固定在矩形避让槽12内。
50.进一步的,无人机机体1内且分别位于两个矩形定位插槽13相背侧面中部的位置均开设有矩形活动槽16,两个矩形活动槽16内均滑动连接有矩形定位滑块19,矩形定位插块61侧面的中部开设有矩形定位孔610,矩形定位滑块19活动插接于矩形定位孔610内,矩形定位滑块19的长度大于矩形定位孔610的深度,当需要拆卸盖板6时,只需要控制两个矩形定位滑块19分别从两个矩形定位孔610内移出即可。
51.进一步的,无人机机体1内且分别位于两个矩形活动槽16相背侧面的位置均开设有矩形驱动仓17,两个矩形驱动仓17内壁的前后两侧之间均转动连接有蜗轮9,两个蜗轮9相对侧面的中部均同轴连接有螺纹杆18,通过蜗轮9带动螺纹杆18转动;
52.两个矩形定位滑块19分别螺纹连接于两个螺纹杆18的外壁,因为矩形定位滑块19是滑动连接于矩形活动槽16内的,所以矩形定位滑块19可以被螺纹杆18稳定驱动,实现矩形定位滑块19的前后移动。
53.进一步的,两个矩形驱动仓17内壁的上下两侧之间均转动连接有蜗杆20,两个蜗杆20分别与两个蜗轮9啮合传动,通过蜗杆20驱动蜗轮9转动,因为蜗杆20和蜗轮9具备自锁功能,可以避免矩形定位滑块19在无人机的飞行过程中发生移位,确保盖板6有效固定在矩形避让槽12内;
54.蜗杆20转轴的底端穿过矩形驱动仓17内壁的底部至外界,且蜗杆20转轴的底端固定连接有旋钮21,旋钮21的顶部与无人机机体1的底部相贴合,可以便于使用者转动蜗杆20。
55.本实施例的实时定位导航的无人机设备在使用时,当使用者需要对无人机进行维护或检修时,使用者只需要转动两个旋钮21,两个旋钮21分别带动两个蜗杆20转动,两个蜗杆20分别驱动两个蜗轮9转动,两个蜗轮9分别驱动两个螺纹杆18转动,两个螺纹杆18分别驱动两个矩形定位滑块19相背移动,使两个矩形定位滑块19分别从两个矩形定位孔610内移出,然后使用者将无人机机体1的底部向下放置,无人机控制主板7和盖板6在重力作用下向下移动,此时,两个矩形定位插块61分别从两个矩形定位插槽13内移出,从而使盖板6和无人机控制主板7取出,然后将无人机控制主板7上连接线的插头拔出即可,该操作方式简单,不需要借助其他工具,方便使用者对无人机进行维护。
56.以上显示和描述了本实用新型的基本原理、主要特征和本实用新型的优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的仅为本实用新型的优选例,并不用来限制本实用新型,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。本实用新型要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1