一种新型救援无人机的制作方法
本技术涉及无人机,特别是一种新型救援无人机。
背景技术:
1、无人驾驶飞机简称无人机,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全地或间歇地自主地操作。
2、在抗震救灾时需要用到无人机进行输送资源,但是现有的大部分无人机在携带救助资源时,大多都是降落至地面,由地面人员进行拿取,根据救灾场地的不同,有些地方无人机降落后会出现进水或遮挡物误碰的情况,进而导致无人机发生损坏,降低了抗震救灾的效率,为此提出一种新型救援无人机解决上述问题。
技术实现思路
1、本部分的目的在于概述本实用新型的实施例的一些方面以及简要介绍一些较佳实施例。在本部分以及本申请的说明书摘要和实用新型名称中可能会做些简化或省略以避免使本部分、说明书摘要和实用新型名称的目的模糊,而这种简化或省略不能用于限制本实用新型的范围。
2、鉴于上述和/或现有的新型救援无人机中存在的问题,提出了本实用新型。
3、因此,本实用新型所要解决的问题在于根据救灾场地的不同,有些地方无人机降落后会出现进水或遮挡物误碰的情况,进而导致无人机发生损坏,降低了抗震救灾的效率。
4、为解决上述技术问题,本实用新型提供如下技术方案:一种新型救援无人机,其包括,
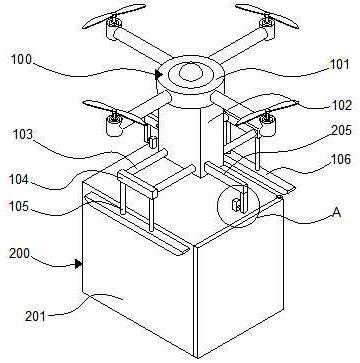
5、主体机构,包括无人机本体,设置于所述无人机本体底部的固定盒,设置于所述固定盒两侧下端的连接杆,设置于所述连接杆远离所述固定盒一端的固定杆,设置于所述固定杆底部前侧和后侧的支撑柱,以及设置于所述支撑柱底部的支撑杆;
6、限位机构,包括物资箱,设置于所述物资箱顶部前侧和后侧的定位块,设置于所述固定盒内腔顶部的电机,设置于所述电机输出轴的齿盘,设置于所述固定盒内腔两侧下端的活动杆,设置于两个所述活动杆相对一侧的齿牙,设置于所述活动杆的底部且位于所述固定盒外部的定位杆,以及设置于所述定位杆靠近所述固定盒一侧下端的限位块。
7、作为本实用新型所述新型救援无人机的一种优选方案,其中:所述限位机构还包括滑槽、设置于所述固定盒内腔两侧的下端,以及设置于所述滑槽内腔的滑块。
8、作为本实用新型所述新型救援无人机的一种优选方案,其中:所述滑块远离所述滑槽内腔的一侧与所述活动杆固定连接。
9、作为本实用新型所述新型救援无人机的一种优选方案,其中:所述齿盘与两个所述齿牙啮合。
10、作为本实用新型所述新型救援无人机的一种优选方案,其中:两个所述活动杆相反的一端均贯穿至所述固定盒的外部并与所述定位杆的顶部固定连接。
11、作为本实用新型所述新型救援无人机的一种优选方案,其中:所述无人机本体的底部与所述固定盒的顶部固定连接。
12、作为本实用新型所述新型救援无人机的一种优选方案,其中:所述电机的顶部与所述固定盒内腔的顶部固定连接。
13、作为本实用新型所述新型救援无人机的一种优选方案,其中:所述限位块远离所述定位杆的一端延伸至所述定位块的内腔并与所述定位块的内腔活动连接。
14、作为本实用新型所述新型救援无人机的一种优选方案,其中:所述连接杆远离所述固定盒的一端与所述固定杆的一侧固定连接。
15、作为本实用新型所述新型救援无人机的一种优选方案,其中:所述固定杆的底部与所述支撑柱的顶部固定连接,所述支撑柱的底部与所述支撑杆的顶部固定连接。
16、本实用新型有益效果为:通过设置连接杆,用于配合固定盒、固定杆、支撑柱和支撑杆,用于对无人机本体落地时进行支撑,通过设置物资箱,用于存放救援物资,通过设置电机,用于带动齿盘转动,通过齿盘与齿牙啮合进而带动活动杆进行位移,通过设置活动杆,用于带动定位杆位移,配合限位块和定位块对无人机本体进行限位,使无人机本体能够将物资箱进行携带,同时便于对物资箱解除限位,使无人机本体可以在空中对物资箱进行投放。
技术特征:
1.一种新型救援无人机,其特征在于:包括,
2.如权利要求1所述的新型救援无人机,其特征在于:所述限位机构(200)还包括滑槽(209)、设置于所述固定盒(102)内腔两侧的下端,以及设置于所述滑槽(209)内腔的滑块(210)。
3.如权利要求2所述的新型救援无人机,其特征在于:所述滑块(210)远离所述滑槽(209)内腔的一侧与所述活动杆(205)固定连接。
4.如权利要求3所述的新型救援无人机,其特征在于:所述齿盘(204)与两个所述活动杆(205)啮合。
5.如权利要求2~4任一所述的新型救援无人机,其特征在于:两个所述活动杆(205)相反的一端均贯穿至所述固定盒(102)的外部并与所述定位杆(207)的顶部固定连接。
6.如权利要求5所述的新型救援无人机,其特征在于:所述无人机本体(101)的底部与所述固定盒(102)的顶部固定连接。
7.如权利要求6所述的新型救援无人机,其特征在于:所述电机(203)的顶部与所述固定盒(102)内腔的顶部固定连接。
8.如权利要求7所述的新型救援无人机,其特征在于:所述限位块(208)远离所述定位杆(207)的一端延伸至所述定位块(202)的内腔并与所述定位块(202)的内腔活动连接。
9.如权利要求8所述的新型救援无人机,其特征在于:所述连接杆(103)远离所述固定盒(102)的一端与所述固定杆(104)的一侧固定连接。
10.如权利要求6~9任一所述的新型救援无人机,其特征在于:所述固定杆(104)的底部与所述支撑柱(105)的顶部固定连接,所述支撑柱(105)的底部与所述支撑杆(106)的顶部固定连接。
技术总结
本技术公开了一种新型救援无人机,包括无人机本体,设置于所述无人机本体底部的固定盒,设置于所述固定盒两侧下端的连接杆,设置于所述连接杆远离所述固定盒一端的固定杆,设置于所述固定杆底部前侧和后侧的支撑柱,以及设置于所述支撑柱底部的支撑杆。本技术有益效果为:通过设置连接杆,用于配合固定盒、固定杆、支撑柱和支撑杆,用于对无人机本体落地时进行支撑,通过设置物资箱,用于存放救援物资,通过设置电机,用于带动齿盘转动,通过齿盘与齿牙啮合进而带动活动杆进行位移,解决了根据救灾场地的不同,有些地方无人机降落后会出现进水或遮挡物误碰的情况,进而导致无人机发生损坏,降低了抗震救灾效率的问题。
技术研发人员:郭兵
受保护的技术使用者:郭兵
技术研发日:20221216
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!