货运无人机货物快速装卸设备及方法与流程
本发明涉及货运无人机装卸,尤其是涉及货运无人机货物快速装卸设备及方法。
背景技术:
1、现有货运无人机主要有固定翼无人机和旋翼无人机两种。
2、其中,固定翼无人机主要采用机舱载运方式,物资通过火车、汽车等运输工具运送到货运机场,在机场完成物资装载,由无人机将物资运输到目的机场,卸货后再由车辆将物资转运至物资需求方指定的地点;旋翼无人机主要采用吊/挂装载运输方式,通常用于近距离点到点的物资载运,可以将物资从集散点直接载运至收货地点。在实际货运场景中,固定翼无人机主要用于较大载重量的长距离运输,旋翼无人机主要用于较小载重量的短途运输。现有两种无人机的性能和物资装卸方式较大差异,两者在实际使用中的装卸货都存在流程复杂,自动化程度低,效率低的问题。
技术实现思路
1、为了解决上述货运无人机装卸货物的技术问题,本发明提供货运无人机货物快速装卸设备及方法。采用如下的技术方案:
2、货运无人机货物快速装卸设备,包括半自动装卸平台和全自动装卸平台,所述半自动装卸平台包括装卸平台组件和一组升降平台车,集装货物装卸机构设置在装卸平台组件上,所述升降平台车用于向货运无人机本体的货舱装卸货物;
3、所述全自动装卸平台包括地上机库组件和地下物资自动运输装载系统,所述地上机库组件用于引导货运无人机本体达到装卸工位,所述地下物资自动运输装载系统用于将货物自动运输及完成无人机本体货舱内货物的装卸;
4、所述半自动装卸平台和全自动装卸平台均设有货运无人机定位机构,所述货运无人机定位机构通过引导和固定起落架轮胎,实现货运无人机本体的准确定位;
5、无人机本体舱体的底部设有装卸口。
6、通过上述技术方案,在无人机本体舱体的底部为设有装卸口,在无人机本体完成降落后,在半自动装卸平台的装卸平台组件指引下进行限位和定位,在一组升降平台车的配合下可以完成半自动的装卸货,效率高,流程简单,设备投入小;
7、在全自动装卸平台上完成装卸货时,货运无人机本体可以在地上机库组件的指引下进行限位和定位,地下物资自动运输装载系统可以自动完成货物的装卸,流程可以实现完全自动化,大大提升了货运无人机的货物装卸效率。
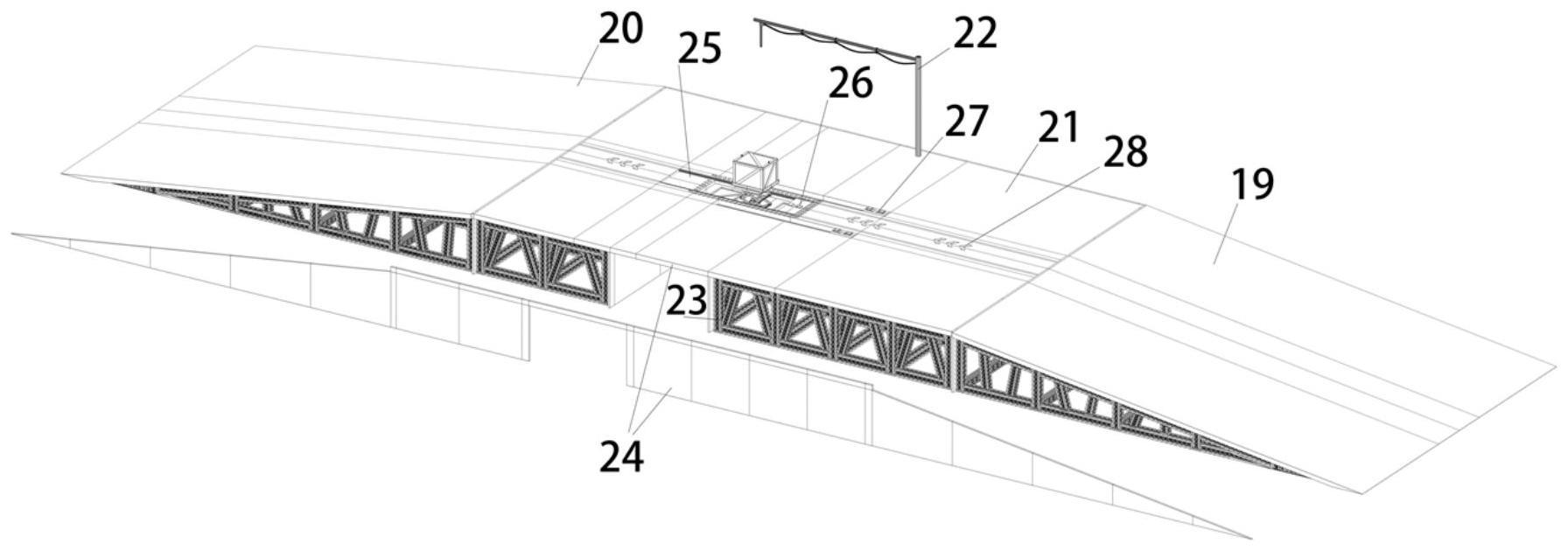
8、可选的,装卸平台组件包括装卸区入口坡道、装卸区出口坡道和装卸平台,所述装卸区入口坡道和装卸区出口坡道分别位于装卸平台的两侧,所述装卸平台组件整体为可拆解钢架结构,可拆解钢架结构上表面和侧面均铺设有蒙板,所述装卸平台设有装卸口,所述装卸口下方设有装卸车辆通道。
9、通过上述技术方案,半自动型的装卸平台组件为可临时搭建的装卸设施。采用高于地面的平台化设计,主要由平台基座和装卸区模块组成,其中平台基座由装卸区入口坡道、装卸区出口坡道和装卸平台组成。平台基座为可拆解钢架结构,上表面和侧面均铺设有蒙板,装卸平台下方设有装卸车辆通道。
10、可选的,货运无人机定位机构包括前起落架定位滑块、一对前滑轨、一对主起落架定位滑块、一对后滑轨和限位轮挡,所述前起落架定位滑块、一对前滑轨、一对主起落架定位滑块、一对后滑轨和限位轮挡分别设置在装卸平台上,前起落架定位滑块用于定位货运无人机本体的前起落架轮胎,并位于一对前滑轨上前后移动,一对主起落架定位滑块用于定位货运无人机本体的一对主起落架轮胎,并位于一对后滑轨上前后移动,所述限位轮挡位于前起落架定位滑块和主起落架定位滑块上,当起落架轮胎进入相应滑块的正确位置时,限位轮挡升起,实现货运无人机本体的三个起落架轮胎的定位和限位。
11、通过上述技术方案,需要对货运无人机进行限位定位时,货运无人机本体的前起落架轮胎落入到前起落架定位滑块,一对主起落架轮胎分别落入一对主起落架定位滑块时,限位轮挡升起,就可实现三个起落架轮胎的限位,效率高,安全可靠。
12、可选的,所述半自动装卸平台和全自动装卸平台均设有自动加油模块,所述自动加油模块包括基座、油管摇臂和伸缩式加油探头,所述基座固定在装卸平台组件上,所述油管摇臂的底部设置在基座上,所述伸缩式加油探头设置在油管摇臂的顶部,并跟随油管摇臂转动。
13、通过上述技术方案,自动加油模块的油管摇臂可以将伸缩式加油探头移动到货运无人机本体背部设置的加油口的上方,伸缩式加油探头伸出后就可对接加油口,在完成装卸货的同时完成自动加油动作,节省了货运无人机本体的准备时间。
14、可选的,所述地上机库组件包括自动装卸区入口滑行道和自动装卸区机库,所述自动装卸区入口滑行道上设有引导标志,所述引导标志用于引导货运无人机本体的导航系统,所述自动装卸区机库设置在自动装卸区入口滑行道的末端,所述货运无人机定位机构设置在自动装卸区机库的装卸区地面。
15、通过上述技术方案,为避免天气原因影响物资装卸任务,地上机库组件为机库形建筑,可进行全天候物资装卸,引导标志是货运无人机飞控系统可识别的导航标识。
16、可选的,地下物资自动运输装载系统包括一组自动货盘车、货盘车运行标线和滑轨式升降机,所述地上机库组件的底部设有两层空间,分别标记为负一层和负二层,所述负一层为物资运输层,负一层上设置货盘车运行标线,一组自动货盘车在货盘车运行标线的引导下运输装有货物的集装载具,所述负二层是装卸区,所述滑轨式升降机设置在负二层,用于将货运无人机运来的集装载具卸载到自动货盘车上,或者将自动货盘车运送的集装载具装载到货运无人机本体的舱体内。
17、通过上述技术方案,地下部分分为两层,负一层为物资运输层,物资运输使用自动货盘车,每台货盘车可载运一个标准集装载具,货盘车智能识别地面施划的货盘车运行标线,按规定方向和路线在装卸区和货物堆放区之间运送集装式载具箱;负二层仅限于装卸区,用来安装滑轨式升降机。
18、可选的,所述滑轨式升降机包括滑轨、滑轨行走器、底座、液压泵、剪刀式支撑架、升举盘、承力框、定位盘和液压臂,所述滑轨设置在负二层地面上,所述滑轨行走器位于滑轨上移动,且可固定,所述底座安装在滑轨行走器上表面,并跟随滑轨行走器移动,所述液压泵安装在底座上,所述剪刀式支撑架底部设置底座上,所述升举盘设置在剪刀式支撑架的顶部,所述承力框设置在负一层地面,且上表面与负一层地面平齐,所述定位盘嵌入承力框内,并可在垂直方向上下移动,定位盘上表面施划有自动托盘车可识别的定位标识,所述液压臂设置在剪刀式支撑架内部,并与液压泵液压连接,且当液压臂的活塞杆伸出或缩回时,剪刀式支撑架展开或回收,完成升举盘升降。
19、通过上述技术方案,滑轨式升降机采用剪叉式结构,由滑轨行走器、底座、液压泵、剪刀式支撑架、升举盘、承力框、定位盘、液压臂组成,滑轨固定安装在负二层地面,底座通过滑轨行走器安装在装卸区滑轨上并可沿滑轨移动,电驱动的液压泵安装于底座内,通过向液压臂输出或回收液压油,使剪刀式支撑架展开或折叠来完成升举盘的升降,承力框固定安装于负一层地面,其上表面与负一层地面平齐,用于承载三个定位盘和集装式载具箱的重量,承力框内尺寸与无人机机腹下装卸货进出口完全一致;定位盘下沉嵌入承力框,上表面与承力框上表面平齐,可在垂直方向自由活动,定位盘上表面施划有自动托盘车可识别的定位标识,保证自动托盘车行驶到定位盘上后能够精确定位到机腹下的装载位置。
20、货运无人机货物装卸方法,装卸方法分为半自动装卸方法和全自动装卸方法;
21、所述半自动装卸方法包括以下步骤:
22、步骤1,货运无人机本体通过坡道滑上平台,装卸区入口坡道设置引导标记,货运无人机本体的飞控系统在引导标记的指引下行驶到装卸平台上方;
23、步骤2,货运无人机本体起落架轮胎限位;
24、步骤3,货运无人机本体装卸货定位,前起落架定位滑块和一对主起落架定位滑块开启,分别在一对前滑轨和一对后滑轨上移动,将货运无人机本体的舱体装卸货口正对装卸平台的装卸口处;
25、步骤4,半自动卸货,空载升降平台车从装卸货通道入口进入装卸位置,升起车载升降平台卸下货运无人机货舱内的集装载具,将货物从装卸货通道出口运送离开;
26、步骤5,半自动装货,载有集装载具的升降平台车待卸货升级平台车离开后,从装卸货通道入口进入装卸位置,升举集装载具完成装货,再从装卸货通道出口离开。
27、所述全自动装卸方法包括以下步骤:
28、步骤a,货运无人机本体降落后,沿方向引导标志向自动装卸区机库滑行;
29、步骤b,货运无人机本体起落架轮胎限位;
30、步骤c,货运无人机本体装卸货定位,前起落架定位滑块和一对主起落架定位滑块开启,分别在前滑轨和后滑轨上移动,将货运无人机本体的舱体装卸货口正对装卸平台的装卸口处;
31、步骤d,位于负一层的空载自动货盘车在货盘车运行标线的指引下从装卸通道一侧入口行驶到装卸口下方,并在定位标识的指引下刹车定位到相应的定位盘上;
32、步骤e,滑轨式升降机的滑轨行走器移动,将整个滑轨式升降机移动到货运无人机本体机舱底部装卸口下方对应的集装载具位置;
33、步骤f,滑轨式升降机的液压臂的活塞杆伸出,向上升举定位盘和所载的自动货盘车,直至无人机货舱内对应位置挂装的集装载具自动解锁脱钩,集装载具由自动货盘车承托稳固之后,液压臂的活塞杆缩回,载有集装载具的自动货盘车回到负一层地面;
34、步骤g,载有集装载具的自动货盘车在货盘车运行标线的指引下从装卸通道另一侧出口行驶到货物仓库或堆放区域;
35、步骤h,卸货完成后,装载集装载具的自动货盘车进行装货,自动货盘车和滑轨式升降机的运行和定位方法与步骤d、e相同;
36、步骤i,滑轨式升降机的液压臂的活塞杆伸出,向上升举定位盘和所载的自动货盘车至挂装高度,无人机货舱内对应位置挂钩完成自动挂装,液压臂的活塞杆缩回,空载自动货盘车回到负一层地面;
37、步骤j,自动货盘车在货盘车运行标线的指引下从装卸通道另一侧出口行驶到卸货准备区域。
38、通过上述技术方案,提供便捷的货物装卸方式,并可根据场地特点灵活制定装卸设施修建方案,具体方案可包括全自动型和半自动型,使用半自动装卸方式时,模块化装卸设施可在物资仓库、物流集散中心附近甚至高速公路服务区快速搭建。使用全自动装卸方式时,永备式装卸设施可直接建设在大型物资仓库或物流集散中心作为组成部分。
39、可选的,货运无人机本体起落架轮胎限位包括以下步骤:
40、当货运无人机本体的前起落架轮胎落入到前起落架定位滑块,一对主起落架轮胎分别落入一对主起落架定位滑块时,限位轮挡升起,实现三个起落架轮胎的限位,此时货运无人机本体处于停机刹车状态。
41、可选的,在无人机定位后,油管摇臂启动,伸缩式加油探头对准货运无人机本体背部的加油口,在装卸货的同时进行自动加油,完成加油后,伸缩式加油探头复位,待装卸货和自动加油均完成后,限位轮挡收起,货运无人机本体的飞控系统按照预置程序滑出,直至起飞标识线,按指令完成起飞。
42、综上所述,本发明包括以下至少一种有益技术效果:
43、本发明提供货运无人机货物快速装卸设备及方法,提供便捷的货物装卸方式,并可根据场地特点灵活制定装卸设施修建方案,具体方案可包括半自动型和全自动型,使用半自动装卸方式时,模块化装卸设施可在物资仓库、物流集散中心附近甚至高速公路服务区快速搭建,可以大大地简化货运无人机的货物装卸流程,提高自动化程度,提高装卸货效率,使用全自动装卸方式时,永备式装卸设施可直接建设在大型物资仓库或物流集散中心作为组成部分。
- 还没有人留言评论。精彩留言会获得点赞!