复杂约束下基于势函数的航天器姿态重定向控制方法
本发明公开复杂约束下基于势函数的航天器姿态重定向控制方法,属于涉及航天器姿态机动规划的控制、调节的。
背景技术:
1、随着航天科技技术的不断进步,航天器的结构越来越复杂,航天任务类型越来越丰富。现代航天器大多装配了数量较大的光学敏感元件,如星敏感器、遥感相机、红外地平仪等,这些光敏元件极易受到空间辐照的影响,从而干扰仪器正常工作,甚至损坏仪器。因此避免太阳光、大气反射光等杂散光进入敏感器视野成为了保障航天器正常工作的重要任务。同时,在航天器执行对地成像、天体观测或是交会对接等需要光学敏感器参与的空间任务时,通常还需要考虑是否有障碍物会妨碍敏感器工作。综合上述各种情况,航天器在运行过程中产生了多种禁止指向的姿态约束集。为了保证航天器的安全,在运行过程中,必须始终规避这些禁止指向区域。由于禁止指向约束集与航天器的实时运动状态、障碍物位置和光源位置始终相关,使得航天器姿态机动规划约束条件较为复杂。此外,存在多禁止指向区域的航天器姿态可行路径集在大部分情况下为无界非凸约束集,这增大了路径规划过程的计算量与控制器的实现难度。除了光学敏感器,航天器上还普遍安装有对地通信的高增益天线与太阳能帆板,还有如中继通信卫星、空间望远镜等特殊定向需求,即航天器的运行过程中还存在某些强制指向的姿态约束集。
2、上述禁止指向姿态约束集的补集与强制指向姿态约束集的交集共同构成了航天器的姿态可行集。航天器姿态重定向任务即是通过姿态机动规避空间中所有障碍物,最终到达期望姿态,并满足航天器的角速度限制与执行器物理限制。在机动过程中,航天器除了面临复杂的约束条件,往往还有诸如能量最优或时间最优的机动指标,这类问题通常可以转换为基于轨迹优化的最优控制问题(optimal control problem,ocp)。一种非线性最优控制策略实现了刚体航天器的姿态跟踪问题,求得哈密顿-雅可比-贝尔曼(hamilton-jacobi-bellman,hjb)方程的封闭形式的解;通过基于顺序惩罚的无导数方法解决了以机动时间为目标的约束最小化问题,得到了时间最优解,然而,在更为精确的模型中,由于航天器的运动学和动力学方程是高度复杂和非线性的,解析求解一般最优姿态控制问题是一项十分困难的工作。采用逆最优方法能够避免直接求解hjb方程,但该方法只能应用于某一类特殊情况。
3、随着人工智能技术的发展和计算机算力的不断提高,离线规划算法也被应用在姿态重定向问题中。自适应动态规划(adaptive dynamic programming,adp)通过迭代地逼近最优控制策略,避免了求解hjb方程,具有更强的通用性,例如,通过基于在线强化学习(reinforcement learning,rl)的控制器解决姿态机动控制问题。由于解析法在运动求解中往往受到很大限制,而强化学习或遗传类算法的计算量又过大,不利于星上运用,故还有研究人员提出了半解析方法,如将运动规划分为解决指向约束与动态约束的两个阶段,经参数优化解决指向约束后,通过调整航天器沿导出路径的速度实现禁区规避。可视化方法也常常用于航天器的姿态重定向问题中,例如,在离散化投影空间中通过枚举网格点并使用图搜索寻路算法来找到选定的初始网格点和目标网格点之间的最短约束路径,基于随机搜索方法搜索可行路径。除此之外,基于势函数的姿态重定向算法也有较多研究,例如,一种基于人工势函数(artificial potential function,apf)的姿态重定向算法,设计了基于lyapunov直接法和积分反步法的控制律,能够实时地规避姿态禁区并完成姿态重定向任务。
4、应用于基于轨迹优化的最优控制问题的方法主要可分为优化方法和分析方法两类。多约束条件下的航天器姿态重定向问题可以转化为多不等式约束下的全局极小值问题,因此优化方法解决此类问题有着天然的优势,但当面临更复杂的模型与更繁多的约束条件时,优化问题的求解将变得十分困难,而强化学习或遗传类算法虽然能够近似地做到最优控制,但因为计算量往往过于庞大,对星上计算机的算力提出了很高的要求,无法很好地满足实时性的要求。分析方法则具备很高的计算效率,对星上计算机的资源占用较少,可以很好地满足实时机动的要求,但分析方法往往难以满足如能量最优或时间最优的优化指标。
5、在航天器运行过程中,姿态规避与重定向的需求只存在于某一小段时间内,姿态机动的执行机构绝大部分时间都是动量轮,只需消耗一定可再生的电能。而在诸如光学敏感器规避强光照射、观测元件向待观测目标定向等任务中,重定向任务具有突发性、不确定性的特点,需要星载计算机做出快速的反应,故姿态重定向任务对于能量或时间优化的要求远没有对于低计算量与实时性的要求高,分析方法的缺陷是可以忍受的。
6、在航天器姿态重定向领域,分析方法应用的主要代表是势函数法。势函数法赋予障碍物较高的势能函数产生排斥力,赋予目标点全局最低势能产生吸引力,在排斥力与吸引力的共同作用下实现禁区规避与姿态重定向。势函数法的问题是容易产生局部极小值点,如当期望姿态位于禁止区域影响区域范围内时,会产生gnron(good nonreachablewith obstacles nearby)问题,无法准确到达目标姿态,存在较大稳态误差。同时,在姿态机动的初始阶段与接近目标阶段,势函数法存在初始输出力矩过大、收敛速度过慢的问题。
7、综上,本发明旨在提出一种复杂约束下基于势函数的航天器姿态重定向控制方法以克服上述缺陷。
技术实现思路
1、本发明的发明目的是针对上述背景技术的不足,提供复杂约束下基于势函数的航天器姿态重定向控制方法,通过基于误差四元数描述的姿态约束构建势函数并给出一种势函数权重确定方式,解决gnron问题,实现复杂约束下控制航天器准确到达目标姿态的发明目的。
2、本发明为实现上述发明目的采用如下技术方案:
3、复杂约束下基于势函数的航天器姿态重定向控制方法,包括如下四个步骤。
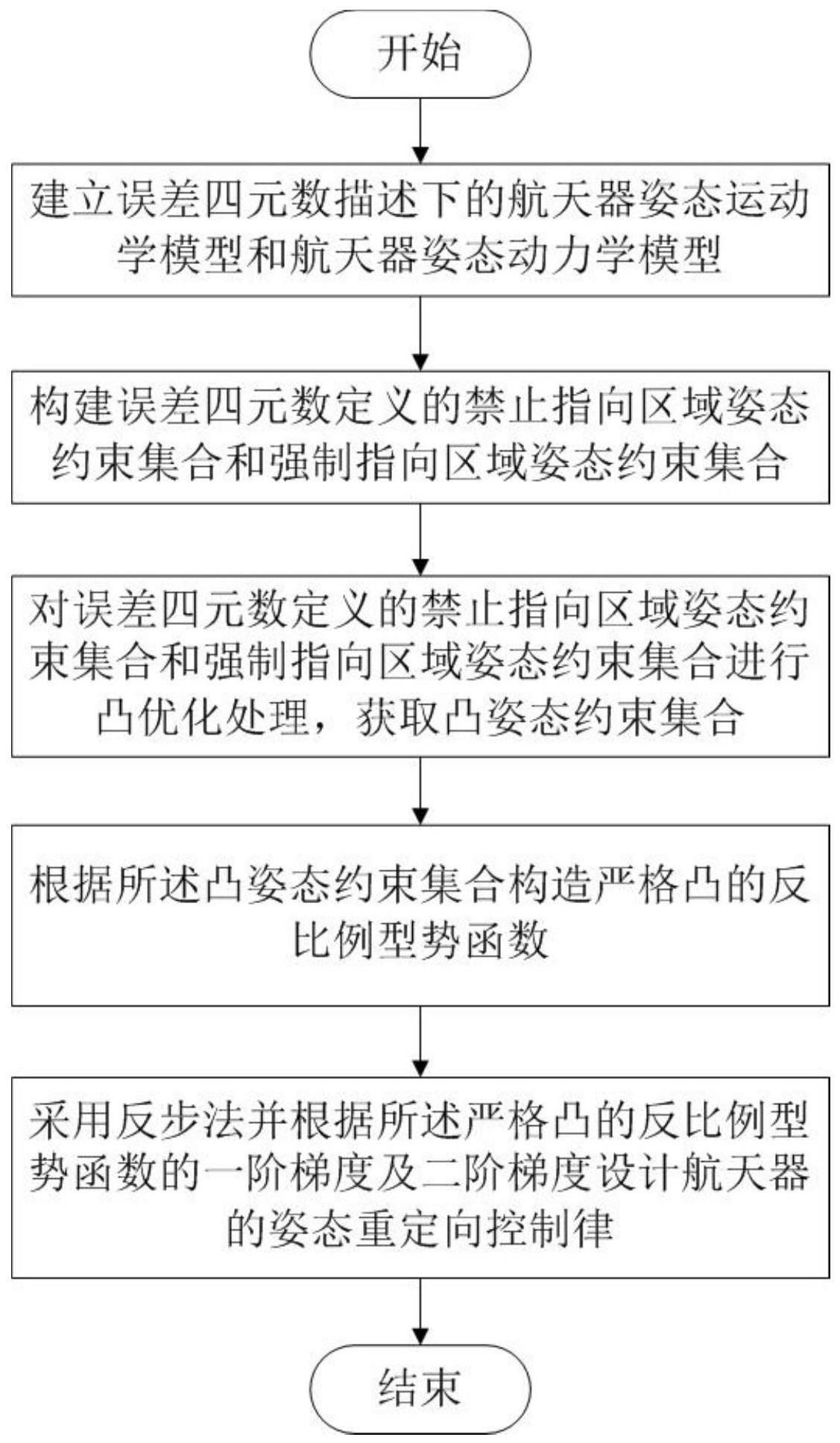
4、步骤一,建立误差四元数描述下的航天器姿态运动学模型和航天器姿态动力学模型;
5、步骤二,构建误差四元数定义的禁止指向区域姿态约束集合和强制指向区域姿态约束集合;
6、步骤三,对误差四元数定义的禁止指向区域姿态约束集合和强制指向区域姿态约束集合进行凸优化处理,获取凸姿态约束集合;
7、步骤四,根据凸姿态约束集合构造严格凸的反比例型势函数;
8、步骤五,采用反步法并根据严格凸的反比例型势函数的一阶梯度及二阶梯度设计航天器的姿态重定向控制律,在控制力矩的限定幅度范围及角速度限定幅度范围内,根据航天器的姿态重定向控制律实时获取航天器姿态重定向的位姿控制指令。
9、进一步地,复杂约束下基于势函数的航天器姿态重定向控制方法中,步骤一建立误差四元数描述下的航天器运动学模型为:其中,e为航天器姿态误差四元数,为e的导数,ev为航天器姿态误差四元数矢部,为ev的叉乘矩阵,e0为航天器姿态误差四元数标部,i3为3×3的单位矩阵,ωe为三轴误差角速度。
10、进一步地,复杂约束下基于势函数的航天器姿态重定向控制方法中,步骤一建立的误差四元数描述下的航天器动力学模型为:其中,j为惯性矩阵,为ωe的导数,ω×为ω的叉乘矩阵,ω为本体坐标系相对于惯性坐标系的角速度在本体坐标系中的分量,为ωd的叉乘矩阵,ωd为期望姿态角速度,u为航天器的控制力矩。
11、进一步地,复杂约束下基于势函数的航天器姿态重定向控制方法中,步骤二构建的误差四元数定义的强制指向区域的姿态约束集合为:qm={q∈uq|qtcmq>0},误差四元数定义的禁止指向区域的姿态约束集合为:qf={q∈uq|qtcfq<0},其中,qm为误差四元数定义的强制指向区域的姿态约束集合,qf为误差四元数定义的禁止指向区域的姿态约束集合,q为航天器姿态四元数,uq为航天器四元数集合,cm为强制指向姿态区域的约束矩阵,cf为禁止指向姿态区域的约束矩阵。
12、进一步地,复杂约束下基于势函数的航天器姿态重定向控制方法中,步骤三获取的凸姿态约束集合包括误差四元数定义的强制指向区域的姿态约束集合的凸集合、误差四元数定义的禁止指向区域的姿态约束集合的凸集合,误差四元数定义的强制指向区域的姿态约束集合的凸集合为:误差四元数定义的禁止指向区域的姿态约束集合的凸集合为:其中,q′m为误差四元数定义的强制指向区域的姿态约束集合的凸集合,为误差四元数定义的禁止指向区域的姿态约束集合的凸集合,为光学敏感器主轴矢量不离开待观测目标方向矢量限制范围的强制指向姿态区域约束矩阵,为第j个光学敏感器主轴矢量yj避开第i个干扰光源方向矢量xi限制范围的禁止指向姿态区域约束矩阵,为第i个干扰光源方向矢量与第j个光学敏感器主轴矢量yj的夹角。
13、进一步地,复杂约束下基于势函数的航天器姿态重定向控制方法中,步骤四根据凸姿态约束集合构造严格凸的反比例型势函数的方法为:根据凸姿态约束集合建立包含吸引势函数和排斥势函数的反比例型势函数,排斥势函数表征各光学敏感器主轴与各干扰光矢量确定的姿态禁止指向区域,吸引势函数表征航天器姿态强制指向区域。
14、进一步地,复杂约束下基于势函数的航天器姿态重定向控制方法中,步骤四构建的反比例型势函数中,吸引势函数为va=ka||ev||2,排斥势函数为其中,va为吸引势函数,ka为吸引势函数的比例系数,vr为排斥势函数,kri为排斥势函数的比例系数,为的简写形式。
15、进一步地,复杂约束下基于势函数的航天器姿态重定向控制方法中,步骤四中构建的排斥势函数的比例系数为分段式系数,在航天器遭遇gnron问题时,排斥势函数权重的取值为零,在航天器未遭遇gnron问题时,根据干扰光方向矢量与光学敏感器主轴矢量之间夹角和光学敏感器视场影响范围的关系确定排斥势函数权重,其中,θrd为光学敏感器视场影响范围,η为权重因子。
16、进一步地,复杂约束下基于势函数的航天器姿态重定向控制方法中,步骤五中采用反步法设计的航天器的姿态重定向控制律为:其中,α为虚拟角速度控制律的设计参数,β为控制力矩的设计参数,ωe为误差角速度,ωs为设计的虚拟角速度,▽v(e)为带入航天器姿态误差四元数后的反比例型势函数的一阶梯度,▽2v(e)为带入航天器姿态误差四元数后的反比例型势函数的二阶梯度。
17、一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现上述方法。
18、本发明采用上述技术方案,具有以下有益效果:
19、(1)本发明采用单位四元数定义姿态禁止区域和姿态强制区域,然后利用禁止区和强制区的凸参数化构造严格凸的反比例型势函数,以避免局部极小值点的产生;
20、(2)本发明构造的反比例型势函数根据凸优化后的禁止指向区域姿态约束集合和强制指向区域姿态约束集合构建,在面对复杂的姿态约束区域分布时,该方法可以较好地完成姿态规划及控制任务,且具有较低的计算量和良好的可移植性,适用于航天器的星上自主姿态机动规划任务。此外,本发明构建的势函数形式简单,易于构造,针对不同的姿态禁区都能很好地适应。
21、(3)针对航天器面临的gnron问题,本发明通过提出一种排斥势函数权重判断方法,保证航天器能够准确到达强制姿态区域。
- 还没有人留言评论。精彩留言会获得点赞!