火星大气进入过程轨迹跟踪制导系统及方法
本发明涉及一种火星大气进入过程轨迹跟踪制导系统及方法,属于火星探测。
背景技术:
1、探测器在火星大气进入过程中是无动力飞行的,在整个过程中只能通过改变探测器倾侧角来调整气动力方向,进而改变探测器飞行轨迹。由于火星大气稀薄,大气密度约为地球的1%,随高度近似呈指数变化,所以探测器通过气动力修正轨迹的能力非常有限,极易出现控制饱和问题,如果不加以妥善处理,不仅会降低轨迹跟踪经度精度,还会导致控制失稳。
2、最常见也最实用的抗饱和方案是控制律整体考虑饱和,其可以总结为如下思路:首先在不考虑输入饱和的情况下进行制导律设计,而后对制导律产生的期望控制量进行约束,使其满足输入饱和的要求。具体而言,又可以分为对控制量直接施加饱和约束以及设计抗饱和辅助系统两种类型。对控制量直接施加饱和约束会使得实际控制输入与期望控制输入有偏差,而这种偏差并不能直接被控制器感受到,会使控制器长期工作在饱和区,控制能力退化;设计抗饱和辅助系统可以使控制器在发生饱和时退出饱和工作区,使得控制器尽可能多的工作在非饱和区,保全控制器性能,但这种方法不能够完全发挥执行机构的实际能力,实际上会降低制导律的快速性。
3、考虑到火星大气进入过程历时短暂,对于制导律的快速性有较强需求,而火星大气进入过程的实际特点又使得制导律必须进行抗饱和设计,亟需提出一种方法,在尽量不损害制导律快速性的同时实现抗饱和效果。
技术实现思路
1、针对如何在尽量不损害制导律快速性的同时实现抗饱和效果的问题,本发明提供一种火星大气进入过程轨迹跟踪制导系统及方法。
2、本发明提供一种火星大气进入过程轨迹跟踪制导系统,包括控制器和抗饱和辅助系统;
3、控制器,用于根据高度跟踪误差e和抗饱和辅助变量χ,结合制导律获得期望控制量uc,制导律中的被控量y=e+χ,根据uc结合控制约束计算实际控制量u,根据实际控制量u按照参考轨迹进行制导;
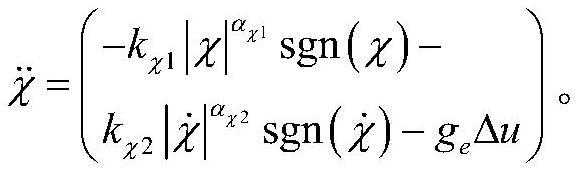
4、抗饱和辅助系统,用于根据上一时刻的期望控制量uc和实际控制量u获取δu,δu=u-uc,获取抗饱和辅助变量χ:
5、
6、均为抗饱和辅助系统增益系数,均为抗饱和辅助系统指数系数,
7、作为优选,控制器中制导律为:
8、
9、kd、ki分别为比例项、微分项和积分项增益,ge=l cosγ,
10、l表示升力加速度,γ表示飞行航迹角,d表示阻力加速度,g表示火星重力加速度,v表示探测器与火星大气相对速度,r表示探测器质心到火心径向距离,rc表示期望的探测器火心距。
11、作为优选,控制器中,根据uc结合控制约束计算实际控制量u为:
12、实际控制量u∈[umin,umax],umax、umin分别为实际控制量的上、下界;
13、
14、作为优选,控制器中,根据期望大气进入点状态r0,v0,θ0,φ0,γ0,ψ0和期望终端状态rf,vf,θf,φf,γf,ψf设计参考轨迹,获得每个时刻期望的探测器状态量,包括参考高度hr,探测器的当前状态包括探测器高度h,获取高度跟踪误差e=h-hr;
15、r0,v0,θ0,φ0,γ0,ψ0分别表示期望大气进入点探测器的火心距、速度、所处位置经度、所处位置纬度、航迹角和航向角;
16、rf,vf,θf,φf,γf,ψf分别表示期望终端探测器的火心距、速度、所处位置经度、所处位置纬度、航迹角和航向角。
17、作为优选,
18、v为探测器与火星大气相对速度。
19、作为优选,控制器根据实际控制量u=cosσ,确定飞行倾侧角σ,结合探测器的纵向动力学方程进行探测器大气进入轨迹跟踪制导。
20、作为优选,探测器的纵向动力学方程为:
21、
22、r为探测器质心到火心径向距离,v为探测器与火星大气相对速度,γ为飞行航迹角,ψ为飞行航向角,θ、φ分别表示经度和纬度,gm=μ/r2为火星重力加速度,μ为火星引力常数,l=ρv2clsr/(2m)和d=ρv2cdsr/(2m)分别表示升力加速度和阻力加速度,m为探测器质量,sr为探测器气动面积,cd、cl分别为火星大气阻力系数和升力系数,ρ为火星大气密度;大气密度ρ满足:
23、
24、式中,ρ0、h分别代表火星标准大气密度与探测器距火星表面高度,h=r-r0,r为探测器距火心距离,r0为火星半径,rs为火星大气参考高度。
25、本发明还提供一种火星大气进入过程轨迹跟踪制导方法,包括:
26、步骤1、确定探测器制导系统的控制约束;
27、步骤2、确定参考轨迹及探测器的当前状态,计算高度跟踪误差e;
28、步骤3、设计制导律,制导律中的被控量y=e+χ,χ表示抗饱和辅助变量,制导律的输出为期望控制量uc,结合控制约束计算实际控制量u,根据实际控制量u按照参考轨迹进行制导;
29、抗饱和辅助变量χ的获取方法为:
30、
31、均为抗饱和辅助系统增益系数,均为抗饱和辅助系统指数系数,
32、根据上一时刻的期望控制量uc和实际控制量u获取δu,δu=u-uc。
33、本发明的有益效果,本发明针对火星大气进入的轨迹跟踪制导系统,设计了抗饱和辅助系统,能够在控制发生饱和时提供补偿量,使得制导系统快速退出饱和工作区,在饱和消失时补偿量能够在有限时间内快速收敛至0。本发明系统能够在发生控制饱和时有效维持制导系统稳定性,并且能够很好的维持原有制导系统的快速性等工作性能,使得制导系统能够在大气进入过程中充分利用探测器执行机构的工作能力,保证探测器快速准确跟踪参考轨迹。
技术特征:
1.火星大气进入过程轨迹跟踪制导系统,其特征在于,所述系统包括控制器和抗饱和辅助系统;
2.根据权利要求1所述的火星大气进入过程轨迹跟踪制导系统,其特征在于,控制器中制导律为:
3.根据权利要求1所述的火星大气进入过程轨迹跟踪制导系统,其特征在于,控制器中,根据uc结合控制约束计算实际控制量u为:
4.根据权利要求1所述的火星大气进入过程轨迹跟踪制导系统,其特征在于,控制器中,根据期望大气进入点状态r0,v0,θ0,φ0,γ0,ψ0和期望终端状态rf,vf,θf,φf,γf,ψf设计参考轨迹,获得每个时刻期望的探测器状态量,包括参考高度hr,探测器的当前状态包括探测器高度h,获取高度跟踪误差e=h-hr;
5.根据权利要求4所述的火星大气进入过程轨迹跟踪制导系统,其特征在于,
6.根据权利要求1所述的火星大气进入过程轨迹跟踪制导系统,其特征在于,控制器根据实际控制量u=cosσ,确定飞行倾侧角σ,结合探测器的纵向动力学方程进行探测器大气进入轨迹跟踪制导。
7.根据权利要求6所述的火星大气进入过程轨迹跟踪制导系统,其特征在于,探测器的纵向动力学方程为:
8.一种火星大气进入过程轨迹跟踪制导方法,其特征在于,所述方法包括:
9.一种计算机可读的存储设备,所述存储设备存储有计算机程序,其特征在于,所述计算机程序被执行时实现如权利要求8所述火星大气进入过程轨迹跟踪制导方法。
10.一种火星大气进入过程轨迹跟踪制导系统,包括存储设备、处理器以及存储在所述存储设备中并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序实现如权利要求8所述火星大气进入过程轨迹跟踪制导方法。
技术总结
火星大气进入过程轨迹跟踪制导系统及方法,解决了如何在尽量不损害制导律快速性的同时实现抗饱和效果的问题,属于火星探测技术领域。本发明包括:控制器根据高度跟踪误差e和抗饱和辅助变量χ,结合制导律获得期望控制量u<subgt;c</subgt;,制导律中的被控量y=e+χ,根据u<subgt;c</subgt;结合控制约束计算实际控制量u,根据实际控制量u按照参考轨迹进行制导;抗饱和辅助系统根据上一时刻的期望控制量u<subgt;c</subgt;和实际控制量u获取Δu,Δu=u‑u<subgt;c</subgt;,获取抗饱和辅助变量χ:本发明使得制导系统快速退出饱和工作区,在饱和消失时补偿量能够在有限时间内快速收敛至0。
技术研发人员:郭延宁,唐搏,吕跃勇,郭敏文,张海博
受保护的技术使用者:哈尔滨工业大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!