一种基于非球面屈光的机身成像系统及其视觉隐身方法与流程
本发明涉及无人机隐身的,更具体地说,它涉及一种基于非球面屈光的机身成像系统及其视觉隐身方法。
背景技术:
1、无人机在最早的隐身是通过迷彩实现,迷彩是一种光学隐身。在视觉上我们很难分清原来的形状,如飞机背上涂迷彩的草绿色,很容易跟草地的颜色混淆;而机腹涂成天蓝色,跟天空的颜色一致,这样无论它在地上还是天上,都很难看清楚。
2、但是光学隐身中多数通过涂装进行视觉干扰,不能根据周围环境进行机身的隐身变化,更具体的,机身由于为多个非球面组成,其屈光度不同,造成涂装不能很好地对机身进行光学隐身,而且机身的低空飞行会更易被察觉。
技术实现思路
1、本发明提供一种基于非球面屈光的机身成像系统及其视觉隐身方法,解决相关技术中光学隐身涂装不能适应性改变光路进而实现机身隐身的技术问题。
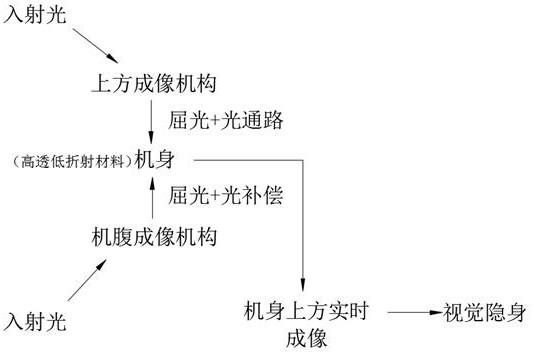
2、根据一个方面,本发明提供了一种基于非球面屈光的机身成像系统,包括无人机机身和分别设于机身的上方成像机构和机腹成像机构,在机身的中部设有光通路,光通路用于光线穿过机身和将上方成像机构的成像传递至机身下方,机腹成像机构将上方成像机构的成像呈现,并将入射机身下方的入射光进行调整,对上方成像机构的成像进行补偿;
3、上方成像机构包括屈光介质和其所连接的介质调节结构,屈光介质分布在机身上方,介质调节结构可调整屈光介质的位置,介质调节结构包括第一电机、第二电机、架体、球体和限位件,第一电机和第二电机的输出轴轴线始终呈九十度夹角,且架体分别安装在第一电机和第二电机的输出轴上,球体安装在其中一个架体上,球体和另一个架体之间通过限位件相连接,连接球体的架体端部与屈光介质相连接。
4、进一步地:上方成像机构还包括消光介质,消光介质对入射机身的边界进行模糊化,使机身曲线趋于光滑。
5、进一步地:消光介质包括增透膜、光学液体和玻璃透镜,光学液体充盈在玻璃透镜和增透膜之间。
6、进一步地:限位件包括限位柱和限位槽,限位槽设于球体的外壁上,且限位槽的槽向与球体的最大外径相适配。
7、进一步地:机腹成像机构包括凸透镜组和光线传导件,凸透镜组设于机身下方的光路端,对入射的屈光路径进行反向调整,使射出机身下方的光线与射入机身上方的光线一致。
8、进一步地:屈光介质包括柔性透镜、光学液体和玻璃透镜,光学液体充盈在玻璃透镜和柔性透镜之间。
9、进一步地:凸透镜组包括若干个菲涅尔螺纹透镜,若干个菲涅尔螺纹透镜组合对入射的屈光路径进行反向调整。
10、进一步地:架体上安装有光感传感器,光感传感器设于屈光介质的下方,光感传感器与第一电机和第二电机之间通过电性连接。
11、进一步地:机身的材料包括高透低折射率材料,机身材料与屈光介质对入射光路进行聚焦或散焦式弯曲。
12、根据另一个方面,本发明提供了一种基于非球面屈光的视觉隐身方法,包括以下步骤:
13、s1:机身由高透低折射率的材料作为主要材料,配合屈光介质对入射光路进行聚焦或散焦式弯曲,再通过消光介质对飞行器外壳或内壁内粗糙部分和空间进行补位,使外壳边界层调整为适应空气动力学的光滑流线曲面;
14、s2:将从机身上侧射入的平行光进行短焦屈光,再通过光线传导件,例如光纤或内反射管将该散度的光线传递至机腹,并通过凸透镜对光线所穿透的像进行依次颠倒,将光路在机腹部按照机顶部外壳屈光路径进行反向调整,使射出机腹的光线与射入机顶部的光线一致,将位于飞机上方的像,机腹无损的传递机腹相应表面,从而实现视觉隐身;
15、s3:从机身下方射入的光线同样的经过短焦屈光,然后对飞机上方的像的射出进行光强补偿,实现机身下侧无损传递出的像光强与周围环境一致,提高隐身的真实度。
16、本发明的有益效果在于:
17、本系统根据光路将介质上分布的非透光实体进行空间分布调整,让出狭窄的光通路,机身上侧的像进行屈光路径变化,通过上层成像传递至下侧机腹上,通过上层成像覆盖机腹,并对机腹射入的光线进行屈光,统一射出路径,实现了无人机的隐身,可实现低空隐身,随着飞行路径和姿态调整,形成实时隐身,提高无人机飞行安全性。
技术特征:
1.一种基于非球面屈光的机身成像系统,其特征在于,包括无人机机身(100)和分别设于机身(100)的上方成像机构和机腹成像机构(500),在机身(100)的中部设有光通路(300),光通路(300)用于光线穿过机身(100)和将上方成像机构的成像传递至机身(100)下方,机腹成像机构(500)将上方成像机构的成像呈现,并将入射机身(100)下方的入射光进行调整,对上方成像机构的成像进行补偿;
2.根据权利要求1所述的一种基于非球面屈光的机身成像系统,其特征在于,上方成像机构还包括消光介质(400),消光介质(400)对入射机身(100)的边界进行模糊化,使机身(100)曲线趋于光滑。
3.根据权利要求2所述的一种基于非球面屈光的机身成像系统,其特征在于,消光介质(400)包括增透膜、光学液体和玻璃透镜,光学液体充盈在玻璃透镜和增透膜之间。
4.根据权利要求3所述的一种基于非球面屈光的机身成像系统,其特征在于,限位件包括限位柱(630)和限位槽(680),限位槽(680)设于球体(610)的外壁上,且限位槽(680)的槽向与球体(610)的最大外径相适配。
5.根据权利要求4所述的一种基于非球面屈光的机身成像系统,其特征在于,机腹成像机构(500)包括凸透镜组(510)和光线传导件(520),凸透镜组(510)设于机身(100)下方的光路端,对入射的屈光路径进行反向调整,使射出机身(100)下方的光线与射入机身(100)上方的光线一致。
6.根据权利要求5所述的一种基于非球面屈光的机身成像系统,其特征在于,屈光介质(200)包括柔性透镜、光学液体和玻璃透镜,光学液体充盈在玻璃透镜和柔性透镜之间。
7.根据权利要求6所述的一种基于非球面屈光的机身成像系统,其特征在于,凸透镜组(510)包括若干个菲涅尔螺纹透镜(530),若干个菲涅尔螺纹透镜(530)组合对入射的屈光路径进行反向调整。
8.根据权利要求7所述的一种基于非球面屈光的机身成像系统,其特征在于,架体上安装有光感传感器(620),光感传感器(620)设于屈光介质(200)的下方,光感传感器(620)与第一电机(640)和第二电机(650)之间通过电性连接。
9.根据权利要求8所述的一种基于非球面屈光的机身成像系统,其特征在于,机身(100)的材料包括高透低折射率材料,机身(100)材料与屈光介质(200)对入射光路进行聚焦或散焦式弯曲。
10.一种基于非球面屈光的视觉隐身方法,通过权利要求1-9中任一一项所述的基于非球面屈光的机身成像系统实现隐身,其特征在于,包括以下步骤:
技术总结
本发明涉及无人机隐身的技术领域,公开了一种基于非球面屈光的机身成像系统及其视觉隐身方法,其成像系统,包括无人机机身和分别设于机身的上方成像机构和机腹成像机构,在机身的中部设有光通路,光通路用于光线穿过机身和将上方成像机构的成像传递至机身下方。本发明根据光路将介质上分布的非透光实体进行空间分布调整,让出狭窄的光通路,机身上侧的像进行屈光路径变化,通过上层成像传递至下侧机腹上,通过上层成像覆盖机腹,并对机腹射入的光线进行屈光,统一射出光路,实现无人机隐身效果。
技术研发人员:方天成,郭飞,谢怡涛
受保护的技术使用者:深圳市江机实业有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!