一种固定翼大型货运无人机智能飞行试验方法及应用与流程
本发明涉及无人机智能飞行试验领域,尤其涉及一种固定翼大型货运无人机智能飞行试验方法及应用。
背景技术:
1、固定翼无人机是指机翼外端后掠角可随速度自动或手动调整的机翼固定的一类无人机,因其优良的功能、模块化集成,现已广泛应用在测绘、地质、石油、农林等职业,具有广阔的市场应用远景。如今一些大型的固定翼无人机不仅能够完成城市短途的紧急运送任务,让医疗冷链、应急保障、安防巡检物资快速抵达现场,还能在特色经济、山区配送等特殊场景中出一份力,物流运输能力强。
2、货运型的固定翼无人机在运输货物时追求的是稳和快,所以在货运无人机投入使用之前需要对无人机进行货物运输的智能飞行试验,测试货运无人机在飞行的过程中遇到各种恶劣天气的智能反应,检测货运无人机的稳定性和飞行速度,而飞行中会遇到的风流就是其中一个试验点。
3、目前,工作人员大多数是在室外测试固定翼货运无人机的智能飞行反应,但是室外的风流会受天气的影响,风流的强度和风向很难控制,很难达到试验的要求,所以有一些固定翼货运无人机会在实验舱中进行试验。然而,目前的实验舱对风流测试的方法比较单一,不便于让无人机经历不同强度和方向的风流,使得无人机的智能飞行试验测试得不够充分和全面,试验效果不佳。
技术实现思路
1、有鉴于此,本发明提供一种固定翼大型货运无人机智能飞行试验方法及应用,能够更加充分和全面地对无人机进行智能飞行检测,使试验效果更佳。
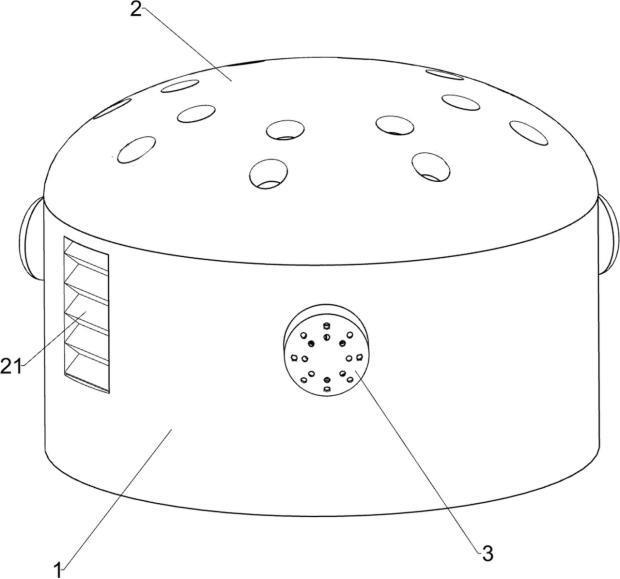
2、技术方案是:一种固定翼大型货运无人机智能飞行试验的应用,包括有试验舱、顶盖、卷闸门、进风罩、试验机构和回风机构,所述顶盖固定连接在试验舱顶部,所述卷闸门固定连接在试验舱一侧,所述试验舱上固定连接有若干个进风罩,若干个所述进风罩为均匀间隔环形排列,且若干个所述进风罩均与顶盖连通,若干个所述进风罩上均设有试验机构,所述回风机构设在试验舱上。
3、进一步地,所述试验机构包括有电动滑轨、电动滑块和强风机,若干个所述进风罩的内壁上均固定连接有两个电动滑轨,位于同一个进风罩内的两个所述电动滑轨呈对称设置,两个所述电动滑轨为一组,每一个所述电动滑轨上均滑动式连接有电动滑块,两个所述电动滑块之间转动式连接有强风机。
4、进一步地,所述回风机构包括有空心柱和圆环,所述空心柱固定连接在试验舱内,所述空心柱上开设有若干个通风口和若干个出风孔,所述进风罩与通风口位于同一水平线,所述圆环固定连接在空心柱内侧下部。
5、进一步地,还包括有转动机构,若干个所述试验机构上均设有转动机构,所述转动机构包括有安装条、缺齿齿条和齿轮,每一个进风罩内的其中一个所述电动滑轨上部均固定连接有安装条,每一个所述安装条上均固定连接有缺齿齿条,若干个所述强风机上均固定连接有齿轮,所述缺齿齿条位于齿轮上方,所述缺齿齿条和齿轮啮合。
6、进一步地,还包括有导向机构,所述导向机构设在空心柱上,所述导向机构包括有封闭板、导风板、导向轮一、导向轮二、导向轮三、钢丝绳、复位弹簧和扭力弹簧,所述封闭板滑动式连接在空心柱内,所述试验舱上转动式连接有若干个导风板,若干个所述导风板为均匀间隔环形排列,若干个所述导风板的一端均固定连接有导向轮一,所述试验舱下部转动式连接有若干个导向轮二,所述空心柱下部转动式连接有若干个导向轮三,若干个所述导向轮一上均固定连接有钢丝绳的一端,所述钢丝绳绕过导向轮二和导向轮三,若干个所述钢丝绳均穿过圆环,若干个所述钢丝绳的另一端与封闭板底部固定连接,所述封闭板与圆环之间连接有复位弹簧,若干个所述导向轮一均与试验舱之间连接有扭力弹簧。
7、进一步地,还包括有遮挡机构,所述遮挡机构设在试验舱上,所述遮挡机构包括有斜槽柱、遮挡板和卡珠,所述斜槽柱转动式连接在试验舱内侧底部,斜槽柱与圆环转动式连接,所述斜槽柱上开设有四个导向槽,所述斜槽柱上固定连接有若干个遮挡板,若干个所述遮挡板均与空心柱接触,所述封闭板上固定连接有四个卡珠,所述卡珠与导向槽滑动式连接。
8、进一步地,还包括有聚风机构,所述聚风机构设在空心柱上,所述聚风机构包括有聚风板、聚风罩和导风锥,所述空心柱内壁上固定连接有若干个聚风板,所述聚风板位于通风口上,所述聚风罩固定连接在空心柱内壁上,所述导风锥固定连接在聚风罩内壁上的顶部。
9、一种固定翼大型货运无人机智能飞行试验方法,包括以下工作步骤:
10、步骤一:工作人员先操纵载有货物的无人机进入试验舱内部绕着空心柱飞行,然后启动三个强风机和电动滑轨,三个强风机会在电动滑轨的驱动下进行不同速度地前后往复移动,让无人机在飞行的过程中侧面经历不同强度的风流;
11、步骤二:同时,三个强风机对着空心柱上的通风口吹出强风,强风会通过聚风罩和导风锥的导向,汇入空心柱下部并从出风孔排出,对无人机底部进行吹风,让无人机在飞行的过程中底部经历不同强度的风流;
12、步骤三:同时,在强风机前后移动的过程中,齿轮会沿着缺齿齿条转动,使强风机摆动,让强风机吹出强风的角度发生改变,让无人机在飞行的过程中侧面经历不同角度的风流;
13、步骤四:同时,汇入空心柱下部的强风会推动封闭板向下移动,进而带动导风板摆动,导风板摆动会对风向进行导向,根据风的强度不同,导风板摆动的角度不同,让无人机在飞行的过程中侧面随机性地经历不同强度和角度的风流;
14、步骤五:同时,遮挡板转动会间歇性遮住一部分的出风孔,增加底部出风的随机性,也让没有被遮挡的出风孔吹出来的风更猛烈,让无人机在飞行的过程中底部随机性地经历不同强度的风流;
15、步骤六:测试完毕后,工作人员关闭强风机和电动滑轨,并将载有货物的无人机驶出试验舱。
16、本发明的有益效果:
17、工作人员操控载有货物的无人机飞进试验舱内,并操控无人机绕着空心柱进行圆周飞行,然后启动电动滑轨和强风机,使得无人机在飞行时侧面遇到风流,三个强风机会进行前后往复移动,不断改变无人机经历的风流距离,测试载有货物的无人机在智能飞行的过程中,侧面遇到不同距离风流的反应;同时三组电动滑轨的驱动速度均不同,所以三组强风机的移动速度也不同,使得远近风交替的速度也不一样,从而更加充分地测试载有货物的无人机在遇到不同程度的风流情况下的智能飞行情况。
18、此外,强风机吹出的强风会通过通风口流入到空心柱内部,并从若干个出风孔流出,使得无人机在飞行的过程中,底部也同时经历风流,进而测试载有货物的无人机在底部遇到风流的情况下的智能飞行反应,从无人机的侧面和底部两个方面进行风流的智能飞行测试,可以充分地测试载有货物的无人机在飞行时经历不同方向风流的反应,从而充分地进行无人机的智能飞行试验。
19、此外,强风机前后往复移动会带动齿轮前后往复移动,齿轮移动的同时会沿着缺齿齿条间歇性转动,使得强风机间歇性摆动,强风机摆动会改变强风吹出的角度,进而间歇性地改变三个强风机吹出的强风的角度,让无人机在飞行时侧面经历不同角度强风的风流,从而更加全面地对无人机进行智能飞行试验。
20、此外,强风机吹出的强风流入空心柱内时会推动封闭板向下移动,不再拉动钢丝绳,在扭力弹簧的弹力作用下,导风板向上摆动,对强风机吹出的强风进行导向,不同强度的强风推动封闭板向下移动的程度不同,同时也使得导风板向上摆动的角度也不同,这样可以根据风的强度不同来对风进行不同角度的导向,增加风向的随机性,从而更加充分地测试无人机在面对不同角度和强度的风流下的智能飞行情况。
21、此外,封闭板向下移动的同时会带动卡珠向下移动,进而带动遮挡板转动,间歇性地堵住一部分的出风孔,增加出风孔底部出风的随机性,同时风流会从没有堵住的一部分出风孔吹出,在风流量一致的情况下,没有堵住的部分出风孔会吹出更强的风流,这样可以增加无人机底部出风的强度和随机性,进而让无人机在进行时底部遇到不同强度的风流,进一步对无人机进行更加充分地智能飞行测试,提高试验效果。
- 还没有人留言评论。精彩留言会获得点赞!