一种具有复合式升力结构的飞行器及其控制方法与流程
本发明涉及航空飞行器,具体来说涉及一种具有复合式升力结构的飞行器及其控制方法。
背景技术:
1、目前,具备垂直起降能力的飞行器由于其能够不受地域限制而实现平稳起降,因而在市场已得到了广泛应用,现在主要有多旋翼飞行器与复合式布局垂直起降飞行器两种技术方案比较普遍。
2、多旋翼飞行器的动力组件全部用来提供垂直于机体的拉力,其具有很好的悬停性能。但其向前飞行时依靠倾斜机体的方式,会导致阻力迅速增加,故其最大飞行速度普遍较低,而且功耗较大。复合翼布局的垂直起降飞行器以多旋翼模式起飞,以固定翼模式平飞。到达一定高度后,前拉电机启动,加速到目标速度后,关闭多旋翼电机,只依靠机翼产生升力,具有好的平飞巡航性能。但这种布局的飞行器由于具有很大的机翼,使其在悬停模式时性能受到很大的影响。一方面机翼大大增加了整体的转动惯量且受风影响巨大,降低了控制精度,降低了稳定性;另一方面在悬停状态机翼为死重,降低了悬停的续航时间。
3、现有的复合式垂直起降固定翼的重心范围只有前部旋翼与后部旋翼距离的1%,在进行货物投放巡航过程中,对货物摆放位置要求高,对货物投放后的重量分布要求也高。
4、总的来说,由于传统的复合翼及多旋翼飞行器均具有一定的缺陷:飞行器在巡航阶段对重心位置要求高,飞行器在垂直起降与悬停时,机翼受风影响大、控制精度低、稳定性不够高,以及由于机翼重量原因导致悬停续航时间短、影响使用的问题,有待解决。
5、因此,亟待解决上述问题。
技术实现思路
1、发明目的:本发明的第一目的是提供一种具有复合式升力结构的飞行器,旨在提出一种新的复合式布局的飞行器,兼顾多旋翼和复合翼各自优势,解决多旋翼飞行器巡航速度低,平飞功耗大、航程短,复合翼布局飞行器在悬停时、机翼受风影响大、控制精度低、稳定性不够高,以及由于机翼重量原因导致悬停续航时间短的问题。
2、本发明的第二目的是提供一种巡航阶段主升力动力组件至少提供70%向上升力的具有复合式升力结构的飞行器。
3、本发明的第三目的是提供一种重心适应范围广的具有复合式升力结构的飞行器。
4、本发明的第四目的是提供一种具有复合式升力结构的飞行器的控制方法。
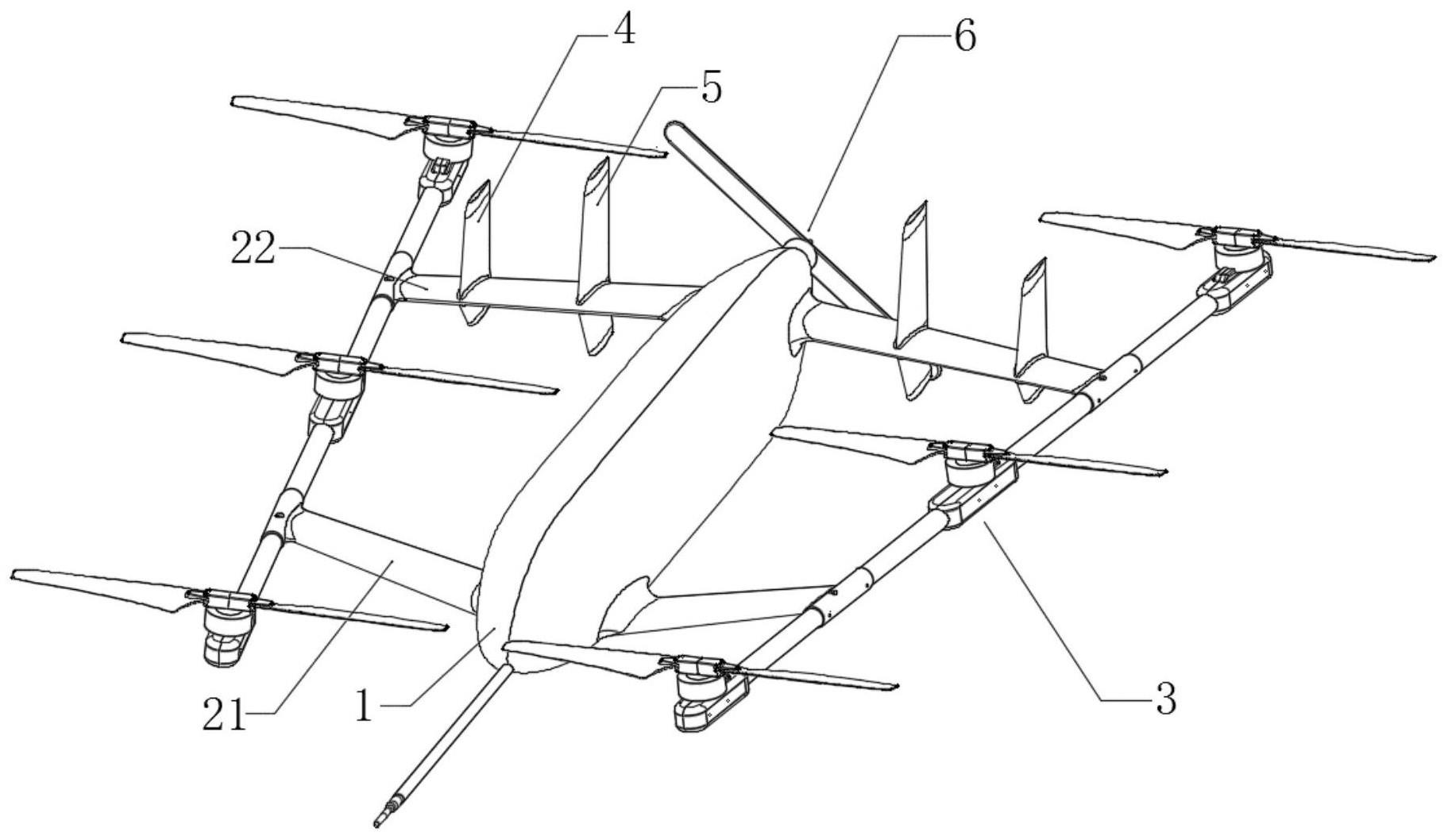
5、技术方案:为实现以上目的,本发明公开了一种具有复合式升力结构的飞行器,包括机身,所述机身的两侧均水平设置有主升力动力组件,所述机身与所述主升力动力组件之间均设置有机翼一和机翼二,所述机翼一和机翼二为相对设置,所述机身的后侧设置有推力动力组件,所述推力动力组件位于所述机身的纵向中轴处;
6、所述机翼二上分别设置有垂直尾翼一和垂直尾翼二,所述垂直尾翼一和垂直尾翼二均与机身平行,所述垂直尾翼二位于靠近所述机身的一侧。
7、其中,主升力动力组件包括固定杆、电子调速器、电机和升力螺旋桨,所述电子调速器固定安装在所述固定杆的外壁上,所述电机固定安装在所述电子调速器的上端,所述升力螺旋桨转动安装在所述电机的上侧,所述升力螺旋桨的下端与所述电机固定连接。
8、优选的,推力动力组件包括发动机和推力螺旋桨,所述推力螺旋桨的一端与所述发动机固定连接,所述推力螺旋桨与所述发动机垂直,所述发动机与所述机身固定连接、且与所述机身平行。
9、再者,机翼一与所述机翼二对称设置于所述机身的两端,分别固定连接在所述机翼一与所述机翼二两侧的主升力动力组件呈一端靠近所述机身、另一端远离所述机身。
10、进一步,主升力动力组件具体为三组,且具有两种连接状态:状态一:所述的升力螺旋桨位于所述固定杆的一端,所述升力螺旋桨位于所述固定杆中位处,每两个所述固定杆首尾连接,且所述机翼一与所述机翼二分别固定于两个所述固定杆连接处的外壁。
11、优选的,机翼一的长度小于所述机翼二的长度,且所述机翼一与所述机翼二沿所述位于所述机身飞行方向依次分布。
12、再者,当飞行器巡航飞行时,主升力动力组件、机翼一和机翼二共同为飞行器提供向上升力,其中主升力动力组件至少提供70%的向上升力。
13、进一步,主升力动力组件的数量为n个,n为≥4的偶数,n个主升力动力组件对称分别于机身两侧;
14、当主升力动力组件的转速为中位转速v中时,其中v中=k0×v大,v大为主升力动力组件的最大转速,k0为小于1的系数;每一个主升力动力组件产生的升力为其中g为整机重量,飞行器的重心在中间处,即位于重心中限位置;
15、主升力动力组件的转速范围为k1×v大~k2×v大,k1和k2均为小于1的系数,k1<k0<k2,当主升力动力组件转速为k1×v大时,每一个主升力动力组件产生升力为当主升力动力组件转速为k2×v大时,每一个主升力动力组件产生升力为
16、当位于重心中限位置前部的主升力动力组件转速以k1×v大旋转,位于重心中限位置后部的主升力动力组件转速以k2×v大旋转时,飞行器的重心后限位置到重心中限位置的距离为其中l为前后主升力动力组件之间的距离,m1为位于重心中限位置前部的主升力动力组件的数量,m2为位于重心中限位置后部的主升力动力组件的数量;
17、当位于重心中限位置前部的主升力动力组件转速以k2×v大旋转,位于重心中限位置后部的主升力动力组件转速以k1×v大旋转时,飞行器的重心前限位置到重心中限位置的距离为其中l为前后主升力动力组件之间的距离,m1为位于重心中限位置前部的主升力动力组件的数量,m2为位于重心中限位置后部的主升力动力组件的数量。
18、本发明一种具有复合式升力结构的飞行器的控制方法,包括如下步骤:
19、在飞行器执行货物投放任务中,货物分布不均匀,飞行器的重心与飞行器自身重心c不重叠,当前部货物重量小于后部货物重量时,飞行器巡航阶段的重心位于飞行器自身重心的后方,飞行器抬头发生姿态改变,飞控根据飞行姿态检测俯仰角,并根据俯仰角降低当位于重心中限位置前部的主升力动力组件转速,增大位于重心中限位置后部的主升力动力组件转速,使飞行器维持巡航过程中的水平姿态;
20、当前部货物重量大于后部货物重量时,飞行器巡航阶段的重心位于飞行器自身重心的前方,飞行器低头发生姿态改变,飞控根据飞行姿态检测俯仰角,并根据俯仰角增大当位于重心中限位置前部的主升力动力组件转速,降低位于重心中限位置后部的主升力动力组件转速,使飞行器维持巡航过程中的水平姿态。
21、本发明一种具有复合式升力结构的飞行器的控制方法,包括如下步骤:
22、当位于重心中限位置前部的货物投放后,由于前部的重量减轻,使得飞行器重心向后移动,飞行器抬头发生姿态改变,飞控根据飞行姿态检测俯仰角,并根据俯仰角降低当位于重心中限位置前部的主升力动力组件转速,增大位于重心中限位置后部的主升力动力组件转速;因为重量减轻,飞行器向上升,飞控降低全部主升力动力组件转速,使飞行器维持水平姿态并保持当前飞行高度;
23、当位于重心中限位置后部的货物投放后,由于后部重量减轻,使得飞行器重心向前移动,飞行器低头发生姿态改变,飞控根据飞行姿态检测俯仰角,并根据俯仰角增大当位于重心中限位置前部的主升力动力组件转速,降低位于重心中限位置后部的主升力动力组件转速;因为重量减轻,飞行器向上升,飞控降低全部主升力动力组件转速,使飞行器维持水平姿态并保持当前飞行高度。
24、有益效果:与现有技术相比,本发明具有以下显著优点:
25、(1)本发明在机身上安装推力动力组件,向前飞行时启动推力动力组件中的发动机驱使推力螺旋桨旋转,进而产生向前推力,使飞行器可以向前飞行,垂直安装在机身两侧的主升力动力组件分为两组,成v字形排列,主升力动力组件安装在机体两侧,两组主升力动力组件分别通过电机带动升力螺旋桨旋转,产生向上的升力,并可通过电子调速器对电机的旋转速度进行控制以实现控制升力大小、达到控制飞机姿态和飞行高度的目的;在飞行器向前飞行时,机身上安装的机翼一与所述机翼二可以可以产生一部分升力,从而减小垂直安装的主升力动力组件的能量消耗,减少向前飞行时的巡航功率,进而达到更高的飞行速度以及更好的续航性能。
26、(2)本发明的重心适应范围大,大大提高了该飞行器的使用便利性;
27、(3)本发明在巡航过程中由主升力动力组件提供大部分的升力,不依赖于舵面控制飞行姿态,机翼和尾翼省略舵面,减轻重量,减小阻力,增大飞行器的可靠性;
28、(4)本发明相对于其他飞行器,在同等量级结构下,比如具有相同的前后主升力动力组件之间距离,缩小机翼的尺寸,机翼的总面积与机身的投影面积比值在不大于1:2;使得飞机的结构重量减轻,提高了载荷能力与续航能力;同时由于机翼面积的相对于整体尺寸的减小,使得飞行器在飞行过程中受风影响减小,获得了比同等量级的飞行器更好的抗风能力,一般可以使抗风等级提高2级。
- 还没有人留言评论。精彩留言会获得点赞!